用于使用人工智能来预测油气储层的渗透率的方法和系统
1.相关申请的交叉引用
2.本技术要求2019年10月1日提交的美国临时专利申请62/909029的优先权权益。
3.关于联邦政府赞助研究或开发的声明
4.不适用。
技术领域
5.所公开的实施方案总体上涉及用于预测地下储层的渗透率的技术,并且具体地涉及一种预测低孔隙度储层在水力压裂之后的渗透率的方法。
背景技术:
6.捕获低孔隙度油气储层中通过水力压裂增强的详细的水力裂缝形状和相关联的渗透率是水平井动态预测和着陆的关键。目前,这种工作首先针对3d地球模型中的每个完井阶段通过水力裂缝建模软件来进行模拟,然后转换为储层模型中的裂缝渗透率以进行储层模拟。这个过程极其耗时,并且因此只能在极少数场景下使用来约束对井动态和着陆的评估。
7.直接从神经网络所实现的图像进行渗透率预测是一种新颖的方法并且具有极大的潜力。然而,在这些研究中,会将1d多变量分析应用于测井数据和神经网络,或者将单通道或单类型多维图像数据用作输入,并且将经典的分类器输出从离散值扩展到连续值。这些研究背后的模型通常通过多变量线性回归来简化问题,这不会考虑空间模式,或者仅考虑传统的单一图像变量的模式分布,而忽略了其他物理变量的促成作用或相互作用。如图1所示,常规的数值模拟方法是耗时且繁琐的,从而使得无法模拟各种井,并且渗透率模型的更新是缓慢的。
8.需要改进渗透率预测以便优化低孔隙度油气储层的开采。
技术实现要素:
9.根据一些实施方案,公开了一种用于预测渗透率的方法,所述方法包括:接收包括感兴趣区的3-d地球模型;生成2-d属性图像;接收2-d裂缝图像;使用所述2-d裂缝图像来训练物理引导的神经网络;以及使用应用于所述2-d属性图像的所述物理引导的神经网络来预测渗透率。
10.在本发明的另一方面,为了解决上述问题,一些实施方案提供了一种非暂时性计算机可读存储介质,所述非暂时性计算机可读存储介质存储一个或多个程序。所述一个或多个程序包括指令,所述指令在由具有一个或多个处理器和存储器的计算机系统执行时致使所述计算机系统执行本文提供的任何方法。
11.在本发明的又一方面,为了解决上述问题,一些实施方案提供了一种计算机系统。所述计算机系统包括一个或多个处理器、存储器和一个或多个程序。所述一个或多个程序存储在存储器中并且被配置为由所述一个或多个处理器执行。所述一个或多个程序包括操
作系统和指令,所述指令在由所述一个或多个处理器执行时致使所述计算机系统执行本文提供的任何方法。
附图说明
12.图1展示了常规的渗透率预测方法及其不足之处;
13.图2示出了根据一些实施方案的渗透率预测方法的流程图;
14.图3解释了本发明的两个可能的实施方案;
15.图4展示了本发明的两个可能的实施方案的细节;
16.图5示出了本发明的一个实施方案的结果;
17.图6示出了本发明的另一个实施方案的结果;
18.图7示出了本发明的一个实施方案的结果;
19.图8示出了本发明的另一个实施方案的结果;
20.图9示出了本发明的另一个实施方案的结果;
21.图10示出了本发明的另一个实施方案的结果;
22.图11示出了本发明的另一个实施方案的结果;
23.图12示出了本发明的另一个实施方案的结果;
24.图13示出了本发明的一个实施方案的步骤;并且
25.图14是示出根据一些实施方案的渗透率预测系统的框图。
26.在整个附图中,类似的附图标记指代对应的部分。
具体实施方式
27.下文描述了提供渗透率预测方式的方法、系统和计算机可读存储介质。这些实施方案被设计成特别用于低孔隙度储层中的渗透率预测。这些实施方案利用了地理空间分布和深度学习的整合。
28.现在将详细参考各种实施方案,在附图中示出了各种实施方案的实例。在以下详细描述中,阐述了许多具体的细节以便提供对本公开和本文描述的实施方案的深入理解。然而,可在没有这些具体细节的情况下实践本文描述的实施方案。在其他情况下,并不会详细描述众所周知的方法、程序、部件和机械设备,以免不必要地模糊实施方案的各方面。
29.计算多尺度运移属性,尤其是诸如地下渗透率场等储层参数对于低孔隙度储层表征来说是至关重要的。这种计算通常分两个步骤执行,即对基质渗透率进行经典的孔隙度-渗透率变换,然后对水力压裂进行数值模拟以生成压裂后渗透率。
30.在第一步骤中,可从岩心测量中生成孔隙度-渗透率变换。可替代地,使用离散几何网络来对地下介质进行抽象化,然后可使用简化的流动方程或经典的经验公式来降低预测渗透率的成本,例如,通常利用kozeny-carman方程来拟合孔隙度-渗透率关系以取得估计:
[0031][0032]
其中是孔隙度,并且s是当使用根据voronoi细分方法划分的delaunay三角网格
描述孔隙空间时来自voronoi单元的不同几何参数的比率。
[0033]
在第二步骤中,针对3d地球模型中的每个完井阶段通过水力裂缝建模软件直接模拟低孔隙度储层中通过水力压裂增强的详细的水力裂缝形状和相关联的渗透率,然后将所述水力裂缝形状和相关联的渗透率转换为储层模型中的压裂后渗透率以进行储层模拟。这个极其耗时的过程将井动态诊断和井距优化、完井以及着陆约束于少数几个场景中。
[0034]
本发明着重于使用监督式机器学习来提高效率和效果的第二步骤,从而允许所述方法用于许多场景。鉴于压裂后渗透率场是储层模型和地质力学模型的联合函数,可能使用多通道全图像半cnn方法对所述模型进行预测,这可帮助开发直接将地下输入模型切片映射成连续的高分辨率渗透率图像的替代模型。
[0035]
本发明使用多通道全图像半卷积神经网络(cnn)来进行回归任务,这通过利用全图像渗透率图像替换全连接层并且利用连续特征图训练网络来进行。一个实施方案还可添加反卷积层来规划物理信息型深度学习神经网络,所述物理信息型深度学习神经网络具有比常规的半cnn更好的结果并且显著地提高预测精度。为了提高创新的深度学习的效率,它可使用多个通用处理单元(gpu)来实现。
[0036]
最近,已经提出了称为物理引导的神经网络(pgnn)的框架,以利用基于物理的模型模拟的输出以及观察特征来使用密集神经网络架构生成预测。已经提出将两种策略用于pgnn中。第一策略是“广义迁移学习”概念,其中使用预定义的物理模型加上其他特征作为输入来构建神经网络以匹配目标;第二策略是在损失函数中包括物理约束。
[0037]
然而,物理引导的神经网络是基于常规的物理模拟理论和约束的有效性。如果常规的物理理论不明确或无效,则由物理理论和约束引入的偏差会导致误导性结论。因此,这种类型的pgnn的应用是有限的。
[0038]
本发明是一种针对地下储层表征问题实施物理引导的神经网络的新方法。首先,我们的数据集已经通过具有地球建模、水力压裂、动态预测和不确定性评估的综合物理建模工作流程来准备,并且通过不同区域和地层中的现场开采和监督来进一步验证。其次,针对深度学习的网络架构进行了定制,以应对不同尺度的裂缝带和非裂缝带。所述网络架构不限于1d或2d密集网络,而是可使用不同的2d或3d卷积神经网络,例如具有残差类块或初始类块的unet或自动编码器模型。第三,我们通过以下方式对数据获取进行创新:利用多个通道创建超级图像集,其中每个通道含有特定的2d或3d储层和岩石属性,并且分批加载来进行训练和预测。第四,所述方法将输入和输出属性离散化,并且还在物理学的基础上考虑了将变量从线性变为对数或指数的变换。最后,所述方法为结构约束增加了额外的损失函数项,以区分裂缝带和非裂缝带,其中非裂缝带与原始背景保持相同,并且裂缝带满足局部平滑并在物理模式连续性上进行考虑。
[0039]
在用于训练本发明的实施方案中,执行逐像素图像回归的深度反卷积神经网络用于使用多图像特征回归来预测地下储层图像更新。作为举例而非限制,反卷积网络可由使用卷积、最大池化、上采样、批量归一化和反卷积单元的13个隐藏层构成。前半部分类似于vgg模型,并且具有非常灵活的架构,所述架构可针对多个不同的特征图像的任何尺寸和分辨率进行更改和训练。第二部分进行上采样并且通过最大池化回到原始分辨率来增大低分辨率。例如,可使用来自不同的水力压裂步骤的1000多个案例来训练所提出的模型。在一个实施方案中,所述模型可使用gpu集群上的分布式计算以实现较高的性能。
[0040]
在一个实施方案中,所述方法使用物理信息型机器学习框架来组合不同的输入图像信息,类似于基质渗透率、孔隙度、含水饱和度、杨氏模量、最小水平应力、储层压力和粘土含量,以作为同一个神经网络中的不同图像通道。为了实现与输入相同的输出分辨率,开发了一种执行逐像素图像回归的深度反卷积神经网络来预测地下储层图像更新。反卷积网络由使用卷积、最大池化、上采样、批量归一化和反卷积单元的10多个隐藏层构成。它具有非常灵活的架构,所述架构可针对多个不同的特征图像的任何尺寸和分辨率进行更改和训练。在一个实例中,所述方法通过使用25个训练案例和4个hpc gpu在50分钟的运行时间下产生了出色的结果(r2》0.9)。相比之下,使用传统方法要花费将近4个月的时间才能生成所述结果。
[0041]
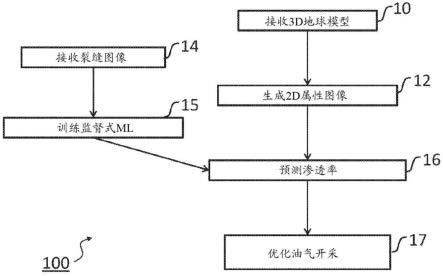
图2示出了用于预测低孔隙度储层的渗透率的方法100的流程图。在操作10处,接收3-d地球模型。操作12从3-d地球模型生成2-d属性图像。作为举例而非限制,这些属性图像可包括孔隙度、饱和度、泊松比等。这些属性图像的实例并不意味着进行限制;这些属性图像可表示任何储层属性。
[0042]
图2的方法100还在操作14处接收裂缝图像。这些可为x-z(空间位置-深度)空间中现有的或新的模拟2-d图像。在操作15处,使用裂缝图像来训练物理引导的神经网络(pgnn)以进行渗透率预测。然后,在操作16处使用这个经过训练的pgnn来预测3d地球模型中的感兴趣区域的渗透率。之后使用预测的渗透率以在操作17处优化油气开采。
[0043]
图3示出了在本发明的范围内的两个不同的神经网络。顶部图示是不具有全连接的半cnn或lenet。输入图像经受卷积、最大池化、卷积、最大池化、上采样,并且最后是线性组合。底部图示是在一些实施方案中可产生具有较高分辨率的结果的deconvnet。它包括执行最大池化和上采样的多个步骤的卷积网络和反卷积网络。
[0044]
图4示出了神经网络中的两个可能的卷积层的细节。基本卷积层40对于在许多尺度上没有出现特征的图像表现良好。当认为图像在多个尺度上含有特征时,针对多尺度特征的卷积层42在使用时是有利的。
[0045]
图5、图6、图7和图8示出了利用参考(真实)图像和通过本发明生成的预测图像的本发明的实施方案的结果,所述预测图像包括真实裂缝50和预测裂缝52。在图5中,使用23个案例来训练半cnn。在图6中,使用23个案例来训练deconvnet。在图7中,使用46个案例来训练半cnn。在图8中,使用46个案例来训练deconvnet。
[0046]
图9和图10示出了利用参考(真实)图像和由本发明的两个不同实施方案生成的预测图像的本发明的实施方案的结果。这些图将使用来自图4的基本卷积层40的实施方案的结果与使用来自图4的针对多尺度特征的卷积层42的结果进行比较。在图9中,将利用参考裂缝60的参考模型与在单尺度裂缝62下使用基本卷积层40所得的预测以及在多尺度裂缝64下由针对多尺度特征的卷积层42所得的预测进行比较。可看出,预测的多尺度裂缝64比预测的单尺度裂缝62更接近参考裂缝60。图9示出了将神经网络应用于训练数据集的结果,因此预测的多尺度裂缝64是非常准确的。
[0047]
在图10中,将利用参考裂缝70的参考模型与在单尺度裂缝72下使用基本卷积层40所得的预测以及在多尺度裂缝74下由针对多尺度特征的卷积层42所得的预测进行比较。可看出,预测的多尺度裂缝74比预测的单尺度裂缝72更接近参考裂缝70。图10示出了将神经网络应用于不同于训练数据集的数据集的结果,因此预测的多尺度裂缝74不如图9中看到
的准确。
[0048]
图11和图12示出了利用参考(真实)图像和使用来自图4的针对多尺度特征的卷积层42实现的预测图像的本发明的实施方案的结果。在图11中,利用裂缝80的参考模型与预测裂缝82进行了很好的比较。类似地,在图12中,利用裂缝90的参考模型与预测裂缝92进行了很好的比较。在图11和图12两者中,在用于预测的数据之外的数据上训练了神经网络。
[0049]
图13展示了本发明的效率和准确性。可看出,非常快速地进行了优化,并且即使对于盲测试,准确性也很高。
[0050]
图14是示出根据一些实施方案的渗透率预测系统500的框图。尽管示出了某些具体特征,但本领域技术人员将从本公开中了解到,为了简洁起见并且为了不模糊本文公开的实施方案的更多相关方面,并未示出各种其他特征。
[0051]
为此,渗透率预测系统500包括一个或多个处理单元(cpu)502、一个或多个网络接口508和/或其他通信接口503、存储器506、以及用于互连这些和各种其他部件的一条或多条通信总线504。渗透率预测系统500可由预置或云中的装置组成。渗透率预测系统500还包括用户接口505(例如,显示器505-1和输入装置505-2)。通信总线504可包括互连系统部件并控制所述系统部件之间的通信的电路(有时称为芯片组)。存储器506包括高速随机存取存储器,诸如dram、sram、ddr ram或其他随机存取固态存储器装置;并且可包括非易失性存储器,诸如一个或多个磁盘存储装置、光盘存储装置、快闪存储器装置或其他非易失性固态存储装置。存储器506可任选地包括位于远离cpu 502之处的一个或多个存储装置。存储器506(包括存储器506内的非易失性和易失性存储器装置)包括非暂时性计算机可读存储介质并且可存储地球模型、裂缝图像等。
[0052]
在一些实施方案中,存储器506或存储器506的非暂时性计算机可读存储介质存储以下程序、模块和数据结构或其子集,包括操作系统516、网络通信模块518和预测模块520。
[0053]
操作系统516包括用于处理各种基本系统服务和用于执行硬件相关任务的程序。
[0054]
网络通信模块518有助于经由通信网络接口508(有线或无线)和一个或多个通信网络(诸如互联网、其他广域网、局域网、城域网等)与其他装置进行通信。
[0055]
在一些实施方案中,预测模块520执行方法100的操作。预测模块520可包括处理输入数据和中间数据产品的数据子模块525。这种数据由数据子模块525供应给其他子模块。
[0056]
属性图像子模块522含有指令集522-1并且接受元数据和参数522-2,这将使得所述属性图像子模块能够执行方法100的操作12。机器学习(ml)功能子模块523含有指令集523-1并且接受元数据和参数523-2,这将使得所述ml功能子模块能够对方法100的操作15和16做出贡献。尽管已经针对本文讨论的子模块确定了具体操作,但这并不意味着进行限制。每个子模块可被配置为执行被确定为其他子模块的一部分的操作,并且可含有其他指令、元数据和参数,它们允许所述子模块执行在处理数据和生成预测渗透率中使用的其他操作。例如,任何子模块任选地都可能能够生成将被发送到用户界面显示器505-1并在所述用户界面显示器上显示的显示。此外,任何数据或处理后的数据产品都可经由一个或多个通信接口503或网络接口508传输,并且可存储在存储器506中。
[0057]
方法100任选地由存储在计算机存储器或非暂时性计算机可读存储介质(例如,图14中的存储器506)中并且由一个或多个计算机系统的一个或多个处理器(例如,处理器502)执行的指令支配。计算机可读存储介质可包括磁盘或光盘存储装置、诸如快闪存储器
的固态存储装置、或者一个或多个其他非易失性存储器装置。存储在计算机可读存储介质上的计算机可读指令可包括以下项中的一者或多者:源代码、汇编语言代码、目标代码或者由一个或多个处理器解译的另一种指令格式。在各种实施方案中,可组合每种方法中的一些操作和/或一些操作的顺序可根据图中所示的顺序进行改变。为了便于解释,方法100被描述为由计算机系统执行,但在一些实施方案中,方法100的各种操作分布在单独的计算机系统上。
[0058]
虽然上文描述了特定实施方案,但将理解,不意图将本发明限制于这些特定实施方案。相反,本发明包括在所附权利要求的精神和范围内的替代物、修改和等效物。阐述了许多具体细节,以便提供对本文呈现的主题的深入理解。但是,对于本领域普通技术人员而言将显而易见的是,在没有这些具体细节的情况下也可实践所述主题。在其他情况下,并不会详细描述众所周知的方法、程序、部件和电路,以免不必要地模糊实施方案的各方面。
[0059]
本文的发明的描述中所使用的术语仅用于描述特定实施方案的目的并且不意图限制本发明。如本发明的说明书和所附权利要求中所使用,除非上下文另有明确指示,否则单数形式“一个/种(a/an)”和“所述”也意图包括复数形式。还将理解,如本文所使用的术语“和/或”指代且涵盖相关联的所列项中的一者或多者的任何和所有可能的组合。还将理解,术语“包括(includes、including、comprises和/或comprising)”在本说明书中使用时指定存在所述特征、操作、元件和/或部件,但不排除存在或添加一个或多个其他特征、操作、元件、部件和/或其群组。
[0060]
如本文所使用,取决于上下文,术语“如果”可被解释为意指“在所述前提条件成立时”或“在所述前提条件成立之后”或“响应于确定”或“根据确定”或“响应于检测到”所述前提条件成立。类似地,取决于上下文,短语“如果确定[所述前提条件成立]”或“如果[所述前提条件成立]”或“在[所述前提条件成立]时”可被解释为意指“在确定所述前提条件成立之后”或“响应于确定所述前提条件成立”或“根据确定所述前提条件成立”或“在检测到所述前提条件成立之后”或“响应于检测到”所述前提条件成立。
[0061]
尽管各个附图中的一些以特定顺序示出了多个逻辑阶段,但可对不与顺序相关的阶段重新排序并且可组合或拆分其他阶段。虽然特别提及了一些重新排序或其他分组,但其他重新排序或分组对于本领域普通技术人员来说将是清楚明了的,并且因此未呈现替代方案的详尽列举。此外,应认识到,所述阶段可以硬件、固件、软件或其任何组合来实现。
[0062]
出于解释的目的,已经参考具体实施方案描述了前述描述。然而,上文的说明性讨论不意图是穷尽的或者将本发明限制于所公开的精确形式。许多修改和变化根据以上教导是可能的。这些实施方案被选择和描述以便最好地解释本发明的原理及其实际应用,从而使得本领域其他技术人员能够通过适于特定预期用途的各种修改最好地利用本发明和各种实施方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。