1.本发明涉及一种用于测量导电元件的边界的线性位移的涡流传感器装置、这种传感器用于减震器的用途以及相应的方法。
背景技术:
2.图5示出了用于减震器1200的线性传感器装置1000。特别地,这种传感器装置使得能够检测减震器的线性位置和运动。例如,传感器装置1000是线性可变差分变压器(lvdt)(也称为线性可变位移差分变压器、线性可变位移换能器),或简称(dt)(差分变压器)。lvdt是一种用于测量线性位移(位置)的电力变压器。
3.lvdt传感器1000包括带槽的内塑料管1020,用于准确地定位变压器绕组。另外,传感器包括三个线圈1010,即一个初级绕组和两个次级绕组;次级绕组部分地布线在初级绕组上。三个线圈1010各自包括20到40个匝。带有集成温度传感器和电连接器的变压器绕组和嵌入式电子器件1030安装在支撑管1040上并且由集尘管1100包覆模制,集尘管1100具有与减震器活塞杆顶板1210的接口。
4.特别地,变压器线圈和电子器件集成在减震器塑料集尘管1100中,利用连接到悬挂轴的减震器1200作为核心。因此,可以确定减震器1200的边界1200的线性位置,即活塞和气缸之间的边界。
5.现有技术的传感器装置的缺点在于需要带有导线线圈的大管。另外,模拟信号必须由电子器件处理。此外,需要用于评估电路的额外的印刷电路板(pcb)。另外,所有这些部件的组装工作量都很大。另外,线圈绕制工艺是昂贵的。
技术实现要素:
6.本发明的目的是提供一种传感器,其可以容易地集成到现有的减震器中。另一目的是一种传感器,其对由于感测平面和移动元件(例如,减震器核心)之间的气隙而产生的侧向位移(lateral displacement)具有鲁棒性。另一目的是一种传感器,其减少组装工作量,特别是通过减少要组装的部件的数量,以及制造感测元件的结构的制造方法。另一目的是提供一种简单的信号评估。另一目的是提供一种轻量的传感器。
7.该目的通过独立权利要求解决。有利的实施例通过从属权利要求解决。
8.根据本发明,该目的通过一种涡流传感器来实现,其中涡流传感器的每个感测线圈的匝数是奇数。这样的配置减少了由导电元件(即,减震器核心和感测平面,感测平面即为感测线圈所布置的区域)之间的倾斜引起的误差,从而即使在发生倾斜误差的配置中也允许使用涡流传感器。
9.更详细地,如本文所使用的,涡流传感器装置是一种利用涡流形成原理来感测位移的传感器。当移动或变化的磁场与导体相交时(反之亦然)会形成涡流。换言之,导电元件影响感测平面中的磁场,涡流传感器布置在该感测平面中。
10.由交流供电的初级线圈产生的快速变化的磁场在导体内产生这种电流。换言之,
当位移导电元件时,覆盖涡流传感器的导电元件的系数发生变化,从而感测值发生变化。因此,确定了导电元件的边界。
11.涡流引起外部交变场的补偿。它们减少了通过下方的次级线圈的被覆盖部分的磁通量。铁磁材料会集中磁场,并且对次级线圈中的磁通量产生相反的效果。因此,涡流传感器能够检测这两种类型的材料。
12.如本文所使用的,倾斜误差是由可移动元件垂直于感测平面的位移引起的误差。换言之,移动体和感测平面之间的边界的距离不是恒定的,即产生倾斜误差。这种倾斜误差在lvdt传感器的情况下不会引起误差,因为lvdt传感器包封了移动元件,即,传感器和运动体以圆柱几何形状对称。对于涡流传感器,该问题可以通过具有奇数的匝来解决。
13.根据本实施例的解决方案可以通过以下进一步的发展和有利的方面进一步改进,它们彼此独立并且可以根据需要任意组合。
14.提供涡流传感器装置以用于测量导电元件的边界的线性位移。如本文所使用的,导电元件例如是金属。
15.涡流传感器装置包括用于发射磁场的发送器构件。发送器构件可以包括线圈以便生成磁场。为了节省空间,线圈可以是平面的。特别地,线圈可以是螺旋线圈。
16.另外,根据实施例,涡流传感器包括中心位置感测构件,用于输出依赖于导电元件的边界的线性位移的中心位置信号。中心位置感测构件包括一对中心感测线圈。一对中心感测线圈使得能够确定导电元件的边界的绝对位置。
17.如本文所使用的,感测线圈是电磁线圈,即,诸如成形的导线的电导体。换言之,感测线圈是具有多个匝的导体。如本文所使用的,匝是导体的环或感测线圈的一次缠绕。
18.另外,每个感测线圈由多个匝形成,其中每个中心感测线圈的匝在感测平面中沿着线性轴线并排布置以覆盖测量范围。
19.如本文所使用的,将匝并排布置形成了平面线圈。换言之,并排布置的匝是电连接的。在具有两个相邻匝的导线的交叉处,导体可以布置在两个层级上。层级可以例如由绝缘层分开,或者导体可以布置在pcb的前侧和后侧上。这样的配置使得在每个匝中由发送器构件感应出电压。更详细地,电压的总和是感测到的信号。通过扰动由发送器构件生成的磁场,可以通过测量的电压量来确定位置。这样的平面线圈可以特别容易地制造,例如作为pcb。
20.有利地,感测线圈的相邻匝在相反的方向上缠绕。这样的配置使得感测线圈的净电压能够为零。因此,可以增加测量范围。
21.如本文所使用的,线性轴线是用于测量导电元件的边界的线性位移的轴线。例如,在圆柱形对称元件的情况下,例如减震器,元件的运动方向是线性轴线。
22.如本文所使用的,感测平面是其中布置有感测线圈的平面。感测平面有利地是平坦的。替代地,该平面可以在圆柱坐标系中定义,并且可以遵循圆柱体的表面。这样的配置可以在需要确定进入管或套管的导电元件的线性位移的配置中节省空间,导电元件例如是进入集尘管的减震器部件。换言之,感测平面能仅部分地形成壳体表面,例如,气缸套。
23.如本文所使用的,测量范围是涡流传感器的测量值的范围,在其中,线性位移测量的误差不超过给定极限。下测量范围极限和上测量范围极限界定了测量范围。
24.另外,根据本发明,涡流传感器包括边缘位置感测构件,用于输出依赖于导电元件
的边界的线性位移的边缘位置信号。边缘位置感测构件包括一对边缘感测线圈,每个边缘感测线圈由多个匝形成。该对边缘感测线圈类似于所述一对中心感测线圈,并且参照上述说明。
25.另外,根据本发明,每个边缘感测线圈的匝在感测平面中沿着线性轴线并排布置,以提高测量范围的测量精度。边缘感测线圈的匝类似于中心感测线圈的匝,并且参照上述说明。
26.如本文所使用的,增加测量精度意味着边缘感测线圈提供了关于导电元件的边界的线性位移的附加信息。
27.有利地,沿着线性轴线,边缘感测线圈的端匝的直径可以小于中心感测线圈的端匝的直径。如本文所使用的,匝的直径是穿过匝的中心且其端点位于匝上的直线段。换言之,在沿着线性轴线的长度上,边缘感测线圈的端匝的尺寸短于中心感测线圈的端匝的尺寸。因此,基于边缘感测线圈得到的周期信号与基于中心感测线圈接收到的周期信号不同。这样的配置允许在测量范围的极限处提高精度。特别地,这样的配置允许通过使用游标尺(也称为游尺)的原理,通过使用插值来提高分辨率。
28.如本文所使用的,感测线圈的端匝是布置在测量范围的极限处的匝。换言之,在导电元件的移动范围的极限处。
29.使边缘感测线圈和中心感测线圈具有奇数的匝,导致接近测量范围的极限的信息减少。减少边缘感测线圈的端匝的尺寸增加了导电元件的线性位移信息,即,增添了附加的相位信息。这些附加的相位信息提高了测量精度,特别是在测量范围的极限处。
30.有利地,边缘感测线圈中的至少一个的匝数大于中心感测线圈中的至少一个的匝数。这样的配置提高了涡流传感器的精度。特别地,在测量范围的极限处,以及在测量范围的中心部分处,精度也得到提高。
31.更有利地,边缘感测线圈的匝的形状相同,并且中心感测线圈的匝形状相同。这样的配置允许以涡流传感器的恒定误差来测量位移。
32.更有利地,沿着线性轴线,边缘感测线圈的匝的直径可以小于中心感测线圈的匝的直径。因此,基于边缘感测线圈接收得到的周期信号与基于中心感测线圈接收到的周期信号不同。这样的配置为允许在整个测量范围上提高精度,并允许紧凑的配置。特别地,这样的配置允许通过使用游标标度(也称为标尺)的原理,通过使用插值来提高分辨率。
33.附加地或替代地,一对感测线圈中的每个感测线圈成形一区域,由该对感测线圈界定的两个区域在感测平面中仅部分地重叠。这样的配置允许通过分析感测线圈对之间的相位关系来改善分辨率。
34.如本文所使用的,该对感测线圈是所述一对中心感测线圈和所述一对边缘感测线圈中的至少一者。
35.有利地,当沿着线性轴线位移时,由该对感测线圈界定的两个区域彼此全等。这样的配置允许分析幅度相似的信号。
36.更有利地,每对感测线圈的区域的形状类似于周期函数,即,具有在垂直于线性轴线的方向上自身重复的模式。这样的配置可以允许易于处理数据。
37.更有利地,该对感测线圈界定的两个区域沿着线性轴线位移周期函数的周期的一半。这样的配置使得能够通过使用反正切算法来增加测量精度。
38.附加地或替代地,中心位置感测构件和边缘位置感测构件在沿着线性轴线的方向上覆盖相同的测量范围。这样的配置实现紧凑的布置。附加地或替代地,中心位置感测构件和边缘位置感测构件在垂直于线性轴线的方向上覆盖相同的测量范围。这样的配置实现紧凑的布置和垂直于线性轴线的方向。替代地,边缘感测线圈和中心感测线圈可以在垂直于线性轴线的方向上并排布置。替代地,边缘感测线圈和中心感测线圈可以在线性轴线上偏移地布置。
39.附加地或替代地,每个中心感测线圈的匝数是三。这样的配置能够仅使用中心感测线圈实现导电元件的边界的线性位移的绝对确定。
40.有利地,每个边缘感测线圈的匝数是九。这样的配置优化了由边缘感测线圈提供的相对位置信息。
41.替代地,边缘感测线圈的匝数和中心感测线圈的匝数互质。这是使用该对中心感测线圈和该对边缘感测线圈两者来对导电元件的边界的线性位移进行绝对确定的替代布置。这样的配置允许通过使用游标尺(也称为游尺)的原理,通过使用插值来提高分辨率。值得注意的是,在这样的配置中,边缘感测线圈的匝数可以是偶数,例如,数量可以大于四。
42.替代地或附加地,发送器构件围绕中心感测线圈和边缘感测线圈中的至少一个。这样的配置允许紧凑的设计。
43.在易于制造的实施例中,发送器构件和/或至少一个感测线圈构件可以包括pcb上的导电路径。
44.磁场可以是交变磁场。例如,这可以通过在发送器构件处施加交流电来实现。
45.为了保持传感器装置紧凑,发送器构件和/或至少一个传感器线圈可以基本上位于平面中。优选地,构件位于相同的平面中。这样的平面必须被理解为基本上扁平的对象,其中一个维度比其他两个维度小得多。传感器装置的部分可以例如位于pcb的前侧,而其他部分可以位于pcb的背侧。在这样的实施例中,传感器装置仍将基本上位于平面中,例如感测平面。
46.在易于制造的实施例中,中心感测线圈形成在第一层中,例如,第一pcb,并且边缘感测线圈形成在第二层中,即,第二pcb。这样的多层布置可以堆叠。
47.有利地,传感器装置还包括微控制器。微控制器包括用于为发送器构件供电的输出,并且微控制器包括四个输入,每个输入与感测线圈中的一个直接地或经由前置放大器间接地连接。如本文所使用的,直接连接是传输感测线圈的输出信号的连接,而没有评估或处理所包含的信息,即,由感测线圈中的发送器构件感应出的高频信号。这样的配置减少了部件数量,特别是减少了用于从所述一对感测线圈的一对信号中生成一个信号的专用集成电路(asic)。特别地,微控制器技术的最新发展使得可以检测感测线圈中感应出的mhz振荡场,并直接对其进行评估,无需进一步使用诸如asic等模拟技术来确定线性位移。
48.如本文所使用的,微控制器是在单个金属氧化物半导体集成电路(ic)芯片上的小型计算机。即,微控制器是通用装置。另一方面,asic是为特定用途而定制的集成电路(ic)芯片,而不是用于通用用途。
49.根据另一实施例,传感器组件包括用于接收导电元件的非磁性且非导电的套筒。
50.根据另一实施例,上文所述的传感器装置用于确定减震器的线性位移。
51.这样的传感器可以布置在减震器外壳旁边的小型传感器外壳中,这样的传感器对
于由传感器盖和减震器之间的气隙引起的侧向位移和倾斜是鲁棒的。另外,该解决方案特别简单且便宜,可以仅使用标准微控制器进行评估,尤其不需要asic。因此,无需额外的模拟部件,可以使用包括信号评估的pcb,无需带有导线连接的单独的线圈。
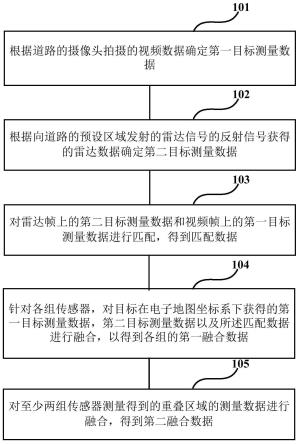
52.另外,本发明涉及一种确定导电元件的边界的绝对位置的方法,其中该方法包括以下步骤:
53.向发送器构件供电以发射磁场;
54.从中心位置感测构件接收依赖于导电元件的边界的线性位移的中心位置信号,中心位置感测构件包括一对中心感测线圈,每个中心感测线圈由多个匝形成,其中每个中心感测线圈的匝在感测平面中沿着线性轴线(x)并排布置,从而覆盖测量范围;
55.从边缘位置感测构件接收取决于导电元件的边界的线性位移的边缘位置信号,边缘位置感测构件包括一对边缘感测线圈,每个边缘感测线圈由多个匝形成,每个边缘感测线圈的匝在感测平面中沿着线性轴线并排布置,以提高测量范围的测量精度;并且
56.其中,每个中心感测线圈和边缘感测线圈的匝数是奇数。
57.根据另一实施例,一种涡流传感器装置,用于测量感测平面中的导电元件的边界的线性位移,该传感器装置包括:用于发射磁场的发送器构件;中心位置感测构件,用于输出取决于导电元件的边界的线性位移的中心位置信号,该中心位置感测构件包括一对中心感测线圈,每个中心感测线圈由多个匝形成,其中每个中心感测线圈的匝在感测平面中沿着线性轴线并排布置,从而覆盖测量范围,并且其中,形成该对中心感测线圈的第一中心感测线圈的匝沿着线性轴线具有第一直径,并且形成该对中心感测线圈的第二中心感测线圈的匝沿着线性轴线具有第二直径,其中第一直径不同于第二直径。这样的配置允许提高第一中心线圈内的精度。特别地,这样的配置允许通过使用游标尺(也称为游尺)的原理,通过使用插值来提高分辨率。特别地,在该实施例中,该对边缘感测线圈不是必需的。中心定位或边缘定位构件的上面讨论的进一步的优点可用于进一步改进该进一步的实施例。
58.现在将使用有利的实施例并参考附图以示例性的方式更详细地描述本发明。所描述的实施例仅仅是可能的配置,其中,如上所述的各个特征可以彼此独立地提供或可以省略。
附图说明
59.附图并入说明书中并形成说明书的一部分以说明本发明的若干实施例。这些附图与描述一起用于解释本发明的原理。这些附图仅仅是为了说明如何制造和使用本发明的优选和替代示例的目的,而不应被解释为将本发明限制为仅示出和描述的实施例。此外,实施例的几个方面可以单独地或以不同的组合形成根据本发明的解决方案。因此可以将以下描述的实施例单独考虑或以其任意组合考虑。所描述的实施例仅仅是可能的配置,并且应当记住,如上所述的各个特征可以彼此独立地提供,或者可以在实施本发明时完全省略。从以下对本发明的各种实施例的更具体的描述中,进一步的特征和优点将变得显而易见,如附图中所示,其中相同的附图标记指代相同的元件,并且其中:
60.图1是感测线圈的示意性布置;
61.图2是示出了中心感测线圈的模拟数据的曲线图;
62.图3是示出了中心位置构件的模拟数据的曲线图;
63.图4是示出了中心位置构件和边缘位置构件的模拟数据的曲线图;
64.图5是用于减震器的传感器;
65.图6是涡流传感器的示意性布置;
66.图7是图6的细节;
67.图8是图6的另外的细节;
68.图9是图6的涡流传感器结合导电元件的示意图;
69.图10是当测量导电元元件的边界位置时的涡流传感器的示意性布置;
70.图11是示出如图10的配置所示的涡流传感器的模拟信号的曲线图;以及
71.图12是示出了从如图11所示的信号数据得出的模拟位置数据的曲线图。
具体实施方式
72.现在将参考附图更详细地解释本发明。首先,将参考图6至12解释涡流传感器的技术基础。
73.更详细地说,图6是涡流传感器的示意性布置。特别地,涡流传感器2000包括发送器构件2100、第一感测线圈2200和第二感测线圈2300,其都可以是平面的电线圈。
74.发送器构件2100围绕第一和第二感测线圈。
75.第一感测线圈2200(在图7中详细地示出)由并排布置的两个匝构成。该形状可以称为眼形感测线圈。如图7所示,并排布置的匝可以以相反的方向缠绕,即,一个顺时针缠绕,一个逆时针缠绕,这由符号加 和减-表示。这样的配置使得由感测构件感应出的净电压为零。特别地,这是由于由每个匝成形的区域相等且发送器构件相对于成形的区域对称地布置而引起的。
76.第二感测线圈2300(在图8中示出)可以由并排布置的三个匝构成。该形状可以称为糖果形线圈。如图8所示,并排布置的匝以相反的方向缠绕,即,边缘匝顺时针缠绕,中心匝逆时针缠绕,这由符号 和-表示。这样的配置能够使得由感测构件感应出的净电压为零。特别地,这是由于具有相同符号的区域(即,具有负号的两个边缘区域)的总和等于具有相反符号的区域(即,具有正号的中心区域)的总和,并且发送器构件相对于成形的区域对称地布置。
77.如图6所示,由每个感测线圈成形的区域可以遵循周期为p的周期函数。当位移周期p的一半时,第一和第二感测线圈的区域可以全等。另外,当位移周期p时,由每个感测线圈形成的区域可以全等。因此,涡流传感器2000覆盖具有两个周期p的测量范围。这样的配置允许沿着导电元件的线性轴线x的绝对位置测量。
78.另外,图9是具有导电元件2400的图6的涡流传感器的示意性布置。导线元件沿着线性轴线x的尺寸l在图9中示出。长度l与涡流传感器的具有两个周期p的测量范围相比较小。这样的配置允许测量导电元件2400的重心的位置。
79.图10示出了当导电元件2410的长度l2与涡流传感器的具有两个周期p的测量范围相比较大的情况。导电元件2410沿着线性轴线x的尺寸l2在图10中示出。特别地,导电元件具有边界2420。未示出相对的边界,因为导电元件在相对侧不受限。在这样的配置中,仅导电元件2410的边界2420可以被测量。
80.图10的配置的模拟测量结果在图11中示出。特别地,针对具有2p的完整测量范围,
对于导电元件的边界位置,示出了眼形的传感器线圈2210的模拟电压和糖果形的传感器线圈2310的模拟电压。
81.另外,在图11中是倾斜误差导致的绘制的误差。如本文所使用的,倾斜误差是由导电元件的边界与感测平面之间的距离引起的,即,其沿着线性轴线增加或减少。特别地,模拟信号值2212和2214示出了对由眼形的感测线圈提供的信号的影响。另外,模拟值2312和2314示出了对由糖果形的感测线圈提供的信号的影响。
82.图12示出了测量范围上的导电元件的边界的模拟绝对位置值。理想地,模拟值示出确定的值(例如,由反正切处理确定的)是线性函数2010,其将边界的位置唯一地分配到一个确定的测量信号。
83.有趣的是,如通过由恒定的倾斜引起的模拟误差示出的,当假设测量导电元件的边界时,涡流传感器用于确定绝对位置的使用是非常受限的,即,图10所示的配置。更详细地,如模拟误差值2012和2014所示,倾斜误差在测量范围上累积,导致测量范围的一端处的位置的非唯一标识。特别地,误差值2014示出了,两个模拟信号对应于导电元件的边界的一个位置。因此,当导电元件相对于线圈平面倾斜时,已知的涡流传感器无法用于确定导电元件的边界的绝对位置。
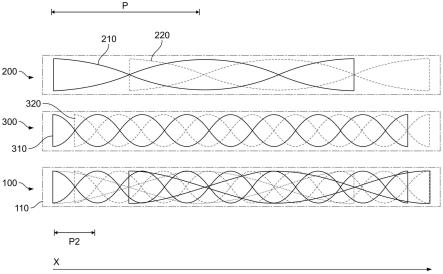
84.图1示出了涡流传感器100,其适于测量导电元件的边界。更详细地,涡流传感器100包括发送器构件110、中心位置感测构件200和边缘位置构件300。发送器构件110的说明参考图6至12的上述说明。
85.仅出于展示的原因,中心位置感测构件200和边缘位置构件300在图1的两个顶部绘图面板中分别示出。两个顶部绘图面板的组合产生了如底部绘图面板中所示的涡流传感器100。
86.更详细地,中心位置构件200包括线圈210、220的对。每个线圈210、220是糖果形的,并且对形状的说明请参考图8。
87.由每个感测线圈210、220成形的区域可以遵循周期为p的周期函数。当位移周期p的一半时,由感测线圈210成形的区域与由感测线圈220成形的区域全等。另外,当位移周期p时,每个感测线圈210、220的区域是全等的。另外,中心位置构件200覆盖具有两个周期p的测量范围。
88.图1的中心位置感测构件200的配置的模拟测量结果在图2中示出。特别地,图2示出了,针对具有2p的完整测量范围,对于导电元件的边界位置,糖果形的传感器线圈212和222的模拟电压。
89.在图2中绘制的是由倾斜误差引起的误差值,即,导电元件的边界与感测平面之间的距离增加或减少。特别地,模拟值214和216示出了对由糖果形的感测线圈210提供的信号的影响。另外,模拟值224和226示出了对由糖果形的感测线圈220提供的信号的影响。
90.另外,图3示出了在测量范围上的导电元件的边界的模拟绝对位置值。理想地,在具有三个半周期p(three half periods p)的测量范围中,模拟值显示确定的值(例如,由反正切处理确定的)是线性函数202,其将边界的位置唯一地分配到一个确定的测量信号。
91.有趣的是,如由倾斜引起的模拟误差所示,当假设测量导电元件的边界时,具有两个糖果形的感测线圈的涡流传感器可以用于确定绝对位置。更详细地,如模拟误差值204和206所示,倾斜误差不在测量范围上积累。而是,其在测量范围的极限处进行补偿,从而在测
量范围的端部处实现位置的唯一标识。因此,具有一对感测线圈(各自具有奇数的匝)的这种涡流传感器可以用于确定导电元件的边界的绝对位置。
92.更详细地,奇数的匝使得具有相同符号的区域(例如图8所示)具有相同的质心。因此,当导电元件的边界沿着线性轴线位移时积累的倾斜误差不会干扰测量结果。相反,这些误差通过使用涡流传感器被消除,涡流传感器具有一对感测线圈,每个感测线圈具有奇数的匝。然而,对于具有眼形的感测线圈的情况,如图7所示,这是不可行的。
93.回到图1,描述了边缘位置构件300。边缘位置构件300可以包括一对线圈310、320。每个线圈310、320是糖果形的,并且对形状的说明请参考图8。
94.由每个感测线圈成形的区域遵循周期为p2的周期函数。当位移周期p2的一半时,由感测线圈310成形的区域与由感测线圈320成形的区域全等。另外,当位移周期p2时,每个感测线圈310和320的区域是全等的。另外,中心位置构件200覆盖具有八个周期p2的测量范围。
95.另外,图4示出了图3的结果。此外,图4绘制了边缘感测构件300的贡献。更详细地,中心感测线圈200的模拟值示出了,在覆盖三个半周期p(three half periods p)的测量范围中,确定的值是线性函数202,其将导电元件的边界的位置唯一地分配给一个值。边缘感测线圈300的模拟值示出了,在覆盖整个两个周期p的测量范围中,确定的值是锯齿函数302,其将导电元件的边界的位置分配到多个值。
96.换言之,边缘感测线圈300提供将测量扩展到几乎完整的测量范围的相对分辨率。
97.如参考图1至图4所公开的实施例所示,每个中心感测线圈210和220可以具有三个匝。这样的配置允许位置的绝对测量。替代地,每个边缘感测线圈的匝数和每个中心感测线圈的数量可以选择为使数量互质。因此,通过比率,绝对位置确定是可能的,即,使用游标尺的原理。
98.另外,根据一个方面,如果每个中心感测线圈210和220具有三个匝,则每个边缘感测线圈310、320可以具有九个匝。这样的布置在扩展绝对确定导电元件的边界的测量范围与增加由边缘感测线圈提供的相对分辨率信息之间进行折衷。
99.另外,沿着线性轴线,边缘感测线圈的端匝的直径小于中心感测线圈的端匝的直径。如本文所使用的,匝的直径是穿过匝的中心且其端点位于匝上的直线段。换言之,在沿着线性轴线的长度上,边缘感测线圈310、320的端匝可以短于中心感测线圈210、220的端匝的尺寸。因此,周期p2的长度小于周期p的长度。这样的配置允许绝对确定导电元件的边界的测量范围可以通过边缘感测线圈310、320来扩展。
100.另外,如图1所示,中心感测线圈200和边缘感测线圈100可以布置为在感测平面(图1中的下面的图)中重叠。这样的配置允许紧凑的传感器布置。
101.另外,如图1所示,发送器构件110可以围绕中心感测线圈200和边缘感测线圈100。这样的配置允许紧凑的传感器布置。
102.另外,如图1所示,发送器构件110、中心感测线圈200和边缘感测线圈100可以在感测平面中对称地布置,即,至少具有一个镜像对称轴,优选两个镜像对称轴。这样的配置允许特别容易地处理数据。
103.即使未在图1中示出,传感器100可以包括控制器,其可以实现为微控制器。控制器用于控制供电的发送器元件。另外,控制器可以直接接收感测线圈中感应的变化电压。控制
器的数据然后可以在另一个未描述的模块中进行处理。控制器例如布置在载体上,该载体具有中心感测构件、边缘感测构件和/或发送器构件中的至少一者。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。