1.本发明涉及一种利用研磨用带而研磨缺陷的装置。
背景技术:
2.此部分中描述的内容只是提供对于本实施例的背景信息而已,并不构成现有技术。
3.最近,厚度薄且重量轻的平板显示器(flat panel display)领域随着对诸如移动电话、笔记本电脑、pda(personal digital assistants,个人数字助理)以及大型电视机等显示器的需求增加而在发展。
4.这种平板显示器中有液晶显示装置(liquid crystal display,lcd)、有机电致发光显示装置(organic light emitting display,oled)等,而平板显示器的核心在于平板显示面板,该平板显示面板以薄膜形态将以矩阵形态排列的多个像素沉积于透明的基板之间而具体实现多种颜色。
5.然而,在形成薄膜的工序中,由于薄膜的不均匀性和异物等的流入而会频繁地产生突起形态的缺陷,而这种突起缺陷会产生基板之间的高度偏差,从而降低光的透射率,且还会导致电气短路或断路。
6.因此,通常是利用研磨用带而去除基板中产生的突起缺陷。将研磨用带保管在盒中,并利用单独的研磨装置等而一边以一定的速度卷绕带一边蚀刻突起而去除缺陷。
7.然而,过去都是通过管理员的手工作业执行了将盒安装于研磨装置并将盒内部的研磨用带使用于研磨的过程以及至在研磨中带用尽之后从研磨装置分离盒为止的所有过程。因此,存在每当带用尽时管理员须逐个更换的不便。
技术实现要素:
8.(发明所要解决的问题)
9.本发明的一个实施例的一个目的在于提供一种缺陷研磨装置,该缺陷研磨装置使感测到的缺陷与研磨用带接触从而研磨而去除缺陷。
10.(解决问题所采用的措施)
11.根据本发明的一个方面,提供一种缺陷研磨装置,其将带盒中的带卷绕而研磨缺陷,所述缺陷研磨装置的特征在于,包括:第一旋转部,其与带盒中的第二轮结合,并接受动力的提供而旋转以将带卷绕到第二轮;第二旋转部,其与带盒中的第一轮结合,并旋转以使卷绕于第一轮的带通过上述第一旋转部来能够卷绕到上述第二轮;第一马达,其向上述第一旋转部提供动力;第一传感器,其感测带盒是否接近;尖端,其以远离或靠近缺陷部位的方式移动,且使从上述第二旋转部卷绕到上述第一旋转部的带突出到缺陷部位;第二马达,其提供动力以使上述尖端远离或靠近上述缺陷部位;以及控制部,其基于上述第一传感器的感测值而控制上述第一马达和上述第二马达的工作。
12.根据本发明的一个方面,上述缺陷研磨装置的特征在于,进一步包括与上述尖端
连接而使上述尖端以远离或靠近缺陷部位的方式移动的主体。
13.根据本发明的一个方面,上述缺陷研磨装置的特征在于,进一步包括缸体,其接受从上述第二马达提供的动力而推动或拉动上述主体,从而使上述尖端通过上述主体来以远离或靠近缺陷部位的方式移动。
14.根据本发明的一个方面,本发明的缺陷研磨装置的特征在于,上述第二马达提供动力以使上述缸体推动或拉动上述主体。
15.根据本发明的一个方面,上述缺陷研磨装置的特征在于,进一步包括带固定部,其形成带的移动路径,以使卷绕于上述第一轮的带经过上述尖端而卷绕到上述第二轮。
16.(发明的效果)
17.如上所说明,根据本发明的一个方面,本发明的缺陷研磨装置具有能够使感测到的缺陷与研磨用带接触从而研磨而去除缺陷的优点。
附图说明
18.图1是图示了根据本发明一个实施例的缺陷研磨系统的图。
19.图2是根据本发明一个实施例的带盒的立体图。
20.图3是根据本发明一个实施例的带盒的分解立体图。
21.图4是根据本发明一个实施例的轮的立体图。
22.图5和图6是图示了根据本发明一个实施例的研磨装置的构成的图。
23.图7是放大了根据本发明一个实施例的研磨装置的一部分的图。
24.图8是放大了根据本发明一个实施例的研磨装置中的尖端的背面的图。
25.图9是图示了根据本发明一个实施例的研磨装置的工作的模式图。
26.(附图标记的说明)
27.100:缺陷研磨系统;110:带盒;120:盒更换装置;130:研磨装置;
28.200:壳体;210:结合孔;220:第一固定孔;230:第一安放孔;
29.240:第二固定孔;250:研磨部进入孔;260:第二安放孔;
30.310、315:槽部;320、325:轮;330:研磨用带;340、350:固定部;
31.345、355:突出部;360:自由辊;370:张力条;380:带排出口;
32.410:第一进入孔;415:第二进入孔;420、425:结合孔;
33.510、520:旋转部;514、524:孔结合部;518、528:进入孔结合部;
34.530、710、720:传感器;540:带固定部;550:尖端;560:突出部;
35.570:缸体;610、630:马达;620:编码器;810:连接器;
36.820:吸入口;910:主体;920:张力部。
具体实施方式
37.本发明能够实施多种变更且能够具有各种实施例,因而要在附图中例示特定实施例并详细地进行说明。但这并不是要将本发明限定在特定的实施方式,而应当理解为包括落入本发明的思想以及技术范围的所有变更、等同物或替代物。在说明各附图时,对于相似的构成要素使用了相似的附图标记。
38.第一、第二、a、b等用语能够使用于说明多种构成要素,但上述各构成要素不得由
上述用语所限定。上述用语仅使用于使一个构成要素区别于其它构成要素的目的,例如,在不逸出本发明的权利范围的情况下第一构成要素可以命名为动力单元要素,与此类似地、动力单元要素也能够命名为第一构成要素。所谓“和/或”的用语包括多个相关联而记载的项目的组合或多个相关联而记载的项目中的某一项目。
39.在提及到某一构成要素与另一构成要素“连接”或者“接触”时,虽然有可能与该另一构成要素直接连接或接触,但应当理解为在两者之间还可以存在其它构成要素。相反,在提及到某一构成要素与另一构成要素“直接连接”或者“直接接触”时,应当理解为在两者之间并不存在其它构成要素。
40.本技术中所使用的用语只是为了说明特定的实施例而使用的,并无限定本发明的用意。单数表达除非在文理上有明显不同的含义就包括复数表达。在本技术中,“包括”或“具有”等用语应当理解为并不是预先排除说明书中所记载的特征、数字、步骤、动作、构成要素、零部件或它们的组合的存在或附加可能性。
41.除非另有定义,否则包括技术性或科学性用语在内这里所使用的所有用语具有与由本领域普通技术人员所通常理解的含义相同的含义。
42.如通常使用的词典中所定义的用语应当解释为具有与相关技术的文理所具有的含义一致的含义,除非在本技术中明确地定义,否则不得理想地或过度地解释成形式上的含义。
43.另外,包括在本发明的各实施例中的各构成、过程、工序或方法等可以在技术上互不矛盾的范围内共享。
44.图1是图示了根据本发明的一个实施例的缺陷研磨系统的图。
45.参照图1,根据本发明的一个实施例的缺陷研磨系统100包括带盒110、盒更换装置120以及研磨装置130。
46.带盒110保管用于去除基板上产生的突起缺陷的研磨用带。就带盒110而言,在内部能够安装并固定研磨用带,在外部具有能够被固定的构造,以安装于盒更换装置120或研磨装置130而能够被传送或研磨缺陷。即,仅仅到在带盒110内安装研磨用带为止经管理员的手,带盒110从安放于盒更换装置120之后开始能够稳定地安装于盒更换装置120而被传送或安装于研磨装置130而对研磨部位进行研磨。下面将参照图2至图4描述带盒110的具体构造。
47.盒更换装置120用已安放于其中的新的带盒110来更换由研磨装置130所耗尽的带盒110。盒更换装置120保管通过管理员而安装有研磨用带的使用前的盒(以下简称为“使用前的盒”)和研磨用带由研磨装置130用尽的使用后的盒(以下简称为“使用后的盒”)。此时,盒更换装置120将保管中的任意使用前的盒固定并传送至研磨装置130而安装于研磨装置130的安装位置。在研磨装置130用尽了使用前的盒中的研磨用带的情况下,盒更换装置120根据研磨装置130的信号将使用后的盒从研磨装置130分离。盒更换装置120将已分离的使用后的盒传送至盒的保管场所而保管,并将新的使用前的盒(必要时)重新传送至研磨装置130并安装于研磨装置130的安装位置。
48.研磨装置130利用带盒110内的研磨用带而研磨基板中的突起缺陷。研磨装置130从单独的缺陷检测装置接收缺陷的位置信息。研磨装置130接收并固定从盒更换装置120传送的(使用之前的)带盒,并使研磨用带突出到突起缺陷的位置而研磨缺陷。研磨装置130将
旋转力施加到带盒110内,以使研磨用带在其被配置的位置以一定的速度退绕且使退绕的研磨用带在另一位置以一定的速度卷绕。这样,若退绕并卷绕的研磨用带与突起缺陷接触,则突起缺陷通过研磨用带的移动速度被研磨。利用这种特性,研磨装置130在固定被传送的带盒之后将旋转力施加到带盒110内以使研磨用带以一定的速度退绕并卷绕,并使研磨用带的一个位置与突起缺陷接触而研磨缺陷。为了研磨缺陷,研磨装置130感测带盒110内的研磨用带是否已用尽而判断是否要更换带盒110。在判断为需要更换带盒110的情况下,研磨装置130使盒更换装置120能够更换带盒110。
49.这样,由于盒更换装置120和研磨装置130工作且带盒110具有能够安装于各装置120、130而被传送或能够固定于各装置120、130的构造,因此,能够自动地执行带盒110安装和更换于各装置而无需管理员干预。下面将参照图5至图9具体说明研磨装置。
50.图2是根据本发明的一个实施例的带盒的立体图,图3是根据本发明的一个实施例的带盒的分解立体图。
51.参照图2和图3,根据本发明的一个实施例的带盒110包括结合孔210、第一固定孔220、第一安放孔230、第二固定孔240、研磨部进入孔250、第二安放孔260、槽部310、315、轮320、325、固定部340、350、自由辊360以及张力条(tension bar)370。
52.在带盒110的壳体200形成有结合孔210、第一固定孔220、第一安放孔230、第二固定孔240、研磨部进入孔250、第二安放孔260以及槽部310、315。
53.结合孔210是形成于壳体200中两个侧面的构造,是用于与盒更换装置120内的第一传送单元(下面参照图5进行描述)结合的构造。结合孔210不是形成于带盒110与盒更换装置120或研磨装置130结合的面,而是形成于与该面垂直的侧面。在第一传送单元中包括用于与结合孔210结合的、以与结合孔的直径相同或相似的直径突出的构成要素。结合孔210与第一传送单元中的上述的构成要素(未图示)结合而能够使带盒110整体通过第一传送单元得到传送。此时,由于第一传送单元主要是在盒(高度方向上的)上部与带盒110结合而沿高度方向(z轴方向)传送带盒110,因此,结合孔210可以形成于两个侧面中的(高度方向上的)上部。
54.在壳体200的一个侧面可以形成有一个结合孔210c,且在另一个侧面可以形成有2个或其以上的结合孔210a、210b。若是在两个侧面均仅形成有一个结合孔的情况,则在第一传送单元与结合孔210结合而传送带盒110的过程中存在带盒110在与侧面垂直的轴线方向上晃动的忧虑。为了防止这种情况,在壳体200的一个侧面形成有2个或其以上的结合孔210a、210b。虽然可以在所有侧面形成2个或其以上的结合孔,但在这种情况下,结合孔与第一传送单元的突出的构成要素的结合需要相当长的时间,且需要非常高的结合精度。因此,为了防止在传送过程中带盒110旋转并防止在结合的过程中过度地消耗长时间而在壳体200的一个侧面形成有一个结合孔210c并在另一个侧面形成有2个或其以上的结合孔210a、210b。
55.第一固定孔220形成于壳体200中的与盒更换装置120相对的面,且与盒更换装置120结合而使盒更换装置120能够固定带盒110。第一固定孔220以长度在一定方向上长的形态形成于壳体200中的与盒更换装置120相对的面。与第一固定孔220结合的盒更换装置120中的构成要素也可以同样地以长度在一定方向上长的形态具体实现并能够旋转。因此,盒更换装置120中的构成要素进入第一固定孔220且在进入的状态下旋转。因此,盒更换装置
120中的构成要素除非旋转至进入时的方向,否则不能从第一固定孔220脱出。由于盒更换装置120中的构成要素通过这种构造与第一固定孔220结合,因此,带盒110能够被固定而不会朝盒更换装置120中的构成要素所进入的方向(y轴方向)脱离。
56.第一安放孔230是形成于壳体中的两个侧面的构造,其可以与盒更换装置120中的安放单元(下面参照图5进行描述)结合并实现安放于安放单元。第一安放孔230形成于壳体中的两个侧面的(高度方向上的)下部。盒更换装置120中的安放单元包括用于与第一安放孔230结合的、以与第一安放孔230的直径相同或相似的直径突出的构成要素。因此,若带盒110安放于安放单元,则第一安放孔230与上述的构成要素结合,从而带盒110能够安放于安放单元并被固定直至与第一传送单元或第二传送单元(下面参照图5进行描述)结合而被传送之前为止。
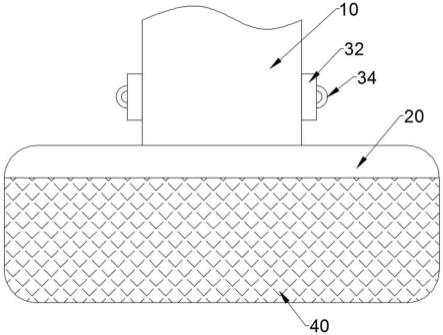
57.第二固定孔240形成于壳体中的与研磨装置130相对的面,其与研磨装置130结合而能够使研磨装置130固定带盒110。在研磨装置130中包括用于与第二固定孔240结合的、以与第二固定孔240的直径相同或相似的直径突出的构成要素。因此,第二固定孔240使带盒110与研磨装置130结合而防止在研磨过程中脱离。
58.研磨部进入孔250是形成于壳体中上表面的构造,其能够使得用于使研磨用带向缺陷的位置突出的研磨装置130中的构成要素进入。研磨部进入孔250以与研磨装置130中的上述的构成要素相同或相似的大小具体实现。研磨部进入孔250在带盒110与研磨装置130结合并被固定之后能够使上述的构成要素使研磨用带向突起缺陷突出。
59.第二安放孔260是形成于壳体中的下表面的构造,其能够使带盒110安放于盒更换装置120中的托盘(pallet,下面参照图5进行描述)。托盘包括用于与第二安放孔260结合的、以与第一安放孔230的直径相同或相似的直径突出的构成要素。带盒110通过盒更换装置120中的第一传送单元来传送至托盘或通过管理员而最初以托盘中的上述的构成要素与第二安放孔260结合的方式得到安放。由于两个构成要素结合,因此,带盒110能够保持安放于托盘中的状态而不会从托盘脱离。
60.可以在壳体中的下表面的一侧形成两个或其以上的第二安放孔260a、260b并在另一侧仅形成一个第二安放孔260c。管理员将使用前的带盒110安放到盒更换装置120中的托盘。此时,管理员须将许多带盒110安放到托盘,在该过程中,有可能在未准确地确认带盒110的方向的情况下安放到托盘。就带盒110而言,由于其与盒更换装置120和研磨装置130结合的方向互不相同,因此须沿着正确的方向配置。因此,在管理员最初将使用前的带盒110安放到托盘时,即使并不非要逐个准确地确认方向也能够配置到托盘。
61.槽部310、315是形成于壳体中的与研磨装置130相对的面上的通孔,其使研磨装置130中的构成要素能够进入到轮320、325。槽部310、315是分别形成于要配置轮320、325的场所的通孔,其使得向轮320、325提供旋转力或者与轮320、325结合而固定带盒110的研磨装置130中的构成要素能够进入到轮320、325。
62.轮320、325能够用于安放研磨用带330或研磨用带的末端并接受来自外部的旋转力而使带退绕(unwind)。
63.第一轮320具有研磨用带330能够安放的构造而用于安放研磨用带330。通常,研磨用带330由于具有接受旋转力而进行退绕的构造,因此在中央具备通孔以能够旋转。第一轮320具有能够与通孔结合的突出构成,从而能够用于安放研磨用带330。
64.第二轮325具有研磨用带的末端能够结合的构造,因而接受来自外部的旋转力而卷绕研磨用带的末端。在第二轮325结合安放于第一轮320的研磨用带330的末端。因此,在第二轮325接受旋转力而卷绕研磨用带的末端的情况下,研磨用带330在第一轮320退绕。研磨用带330通过第一轮320和第二轮325的工作而能够以一定的速度退绕。第一轮320和第二轮325的具体构成图示于图4中。
65.图4是根据本发明的一个实施例的轮的立体图。
66.参照图4(a),第二轮325包括第二进入孔415。经由槽部315进入的研磨装置130中的传递旋转力的单元(以下称为“动力单元”,未图示)进入第二进入孔415。动力单元(未图示)进入第二进入孔415而施加旋转力,从而第二轮325能够旋转。此时,各第二进入孔415的末端形成为逐渐变窄(tapering)以使动力单元(未图示)能够顺利地进入。另外,动力单元能够接受从研磨装置130提供的动力而主动地改变位置以与第二进入孔415完整地结合。动力单元(未图示)难以一次就进入形成有第二进入孔415的部位。动力单元(未图示)能够接受所提供的动力而主动地改变位置并进入第二进入孔415。由于动力单元(未图示)能够改变位置,因此,第二进入孔415以相对小(与第一进入孔相比)的面积具体实现,从而动力单元(未图示)在之后对第二轮325施加旋转力时能够更顺利地施加旋转力。
67.第二轮325在中央部包括研磨装置130中的用于固定带盒110的构成要素能够进入的结合孔425。结合孔425在与朝向研磨装置的方向相反的方向上仅以既已设定的长度(研磨用带的厚度以上)突出,且在朝向研磨装置130的方向上具有上述的构成要素所能够进入的孔,从而上述的构成要素能够仅以一定长度进入而实现研磨用带的安放。研磨装置130中的上述的构成要素进入到结合孔425中,从而第二轮325在旋转的过程中能够固定于既定位置而不会沿高度方向上升、下降或偏向侧面。
68.参照图4(b),第一轮320包括第一进入孔410。研磨装置130中的用于固定带盒110的单元(以下简称为“固定单元”)进入第一进入孔410。无论怎样,研磨用带330安放成横跨两个轮320、325,因而即使仅有一个轮旋转,两个轮也均能够旋转,因此,研磨装置130无需在两个轮均具备用于施加旋转力的动力单元和动力源。因此,不是非要动力单元进入第一进入孔410,而是固定单元进入第一进入孔410。
69.与第二进入孔415相同地,第一进入孔410的末端也形成为逐渐变窄(tapering)。然而,第一进入孔410具有相对大于第二进入孔415的面积。如上所述,进入第二进入孔415的动力单元能够主动地改变位置,因此,即使最初进入的位置不是形成有第二进入孔415的部位,也能够改变位置。但是,进入第一进入孔410的是固定单元而不是动力单元。固定单元由于不是接受所提供的动力的构成要素,因而不能如动力单元那样改变位置。因此,若第一进入孔410以与第二进入孔415相同的面积具体实现,则会发生固定单元难以进入的情况。为了防止这种情况,第一进入孔410具有相对大于第二进入孔415的面积。
70.与第二轮325相同地,第一轮320也在中央部包括结合孔420。研磨装置130中的用于固定带盒110的构成要素进入结合孔420中。
71.如图4所示,各进入孔410、415可以形成于各结合孔420、425的周边。
72.重新参照图2和图3,固定部340、350与轮320、325结合而防止安放于轮的研磨用带330或研磨用带的末端脱离。即使研磨用带330安放于轮或研磨用带的末端与轮结合,在旋转过程中,研磨用带330或研磨用带的末端由于离心力等而也会沿着远离进入的研磨装置
130的方向( y轴方向)脱离。为了防止这种情况,固定部340、350(在与朝向研磨装置的方向相反的方向上)与各轮的结合孔420、425结合。由于固定部340、350与各轮的结合孔420、425结合,因此,防止安放于各轮320、325的研磨用带330或研磨用带的末端脱离。
73.在各固定部340、350的一个位置(例如,中央)可以形成朝向研磨装置的各构成要素进入的方向( y轴方向)突出的突出部345、355。突出部345、355朝向该方向突出,从而可以减小固定部340、350与张力条(tension bar)370接触的面积。若固定部340、350与张力条370直接接触,则接触面积变大。接触面积的增加会导致固定部340、350对研磨用带330进行加压的强度的增加,因此存在给研磨用带330的旋转带来影响的可能性。为了防止这种情况,各固定部340、350包括突出部345、355以减小接触面积。
74.自由辊360安放于带盒110内而调节退绕的研磨用带330的路径。自由辊360具有圆柱形态以防阻碍研磨用带330的行进,且配置于研磨用带330所要经由的路径上。若研磨用带330安放于第一轮320并接受旋转力而退绕,则自由辊360并不是使退绕的研磨用带330径直卷绕于第二轮325,而是使退绕的研磨用带330经由自由辊360之后卷绕于第二轮325。自由辊360使研磨用带330经由自由辊360自身,从而调节研磨用带330的路径。此时,自由辊360可以位于带排出口380所在的下端。因此,研磨用带330经由各自由辊360并经过带排出口380而暴露于外部,并能够卷绕于第二轮325。由于研磨用带330以在带排出口380暴露的方式行进,因此,通过进入到研磨部进入孔250的(用于使研磨用带突出的)研磨装置130中的构成要素而能够使研磨用带330突出于带排出口380的外部。
75.就张力条370而言,其一个面与带盒110的壳体200接触且另一个面分别与固定部340、350接触,从而防止固定部340、350脱离。张力条370以具有张力(tension)的部件具体实现并配置于壳体200与固定部340、350之间。会存在固定部340、350、主要是固定部340在研磨装置的各构成要素所进入的方向( y轴方向)上承受来自研磨用带330的过大的力的情况。尽管固定部340与第一轮320已结合,也会存在结合力不足以防止研磨用带330脱离的状况。张力条370由于利用与固定部340、350结合的面相反的侧的面而与带盒110的壳体200接触,因此,能够防止固定部340、350脱离。
76.缓冲部件375可以附着于张力条370与固定部340、350接触的部分的相反侧的面上。如上所述,在从固定部340、350、主要是从固定部340作用过大的力的情况下,张力条370与固定部340、350接触的部分的相反侧的面会与壳体200激烈地碰撞。在这种情况下或这种情况持续地重复的情况下,会给张力条370或壳体200带来坏影响。为了防止这种情况,在张力条370与固定部340、350接触的部分的相反侧的面附着缓冲部件375而减轻冲击。缓冲部件375可以由如硅酮或凝胶那样的冲击吸收性能优良的材料具体实现。
77.如上所述,带盒110通过具备于壳体200中的多种构成要素而在与盒更换装置120或研磨装置130自动地结合时能够容易地结合而被传送。
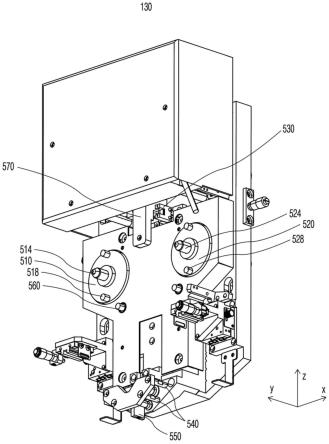
78.图5和图6是图示了根据本发明的一个实施例的研磨装置的构成的图,图7是放大了根据本发明的一个实施例的研磨装置的一部分的图,图8是放大了根据本发明的一个实施例的研磨装置中的尖端的背面的图。
79.参照图5至图8,根据本发明的一个实施例的研磨装置130包括第一旋转部510、第二旋转部520、第一传感器530、带固定部540、尖端(tip)550、突出部560、缸体570、第一马达610、编码器620、第二马达630、第二传感器710、第三传感器720、连接器810、吸入口820以及
控制部(未图示)。
80.第一旋转部510与带盒110中的轮325结合并接受从第一马达610提供的动力而使轮325旋转。第一旋转部510从形成于带盒110的槽部315进入而与轮325结合。第一旋转部510可以包括孔结合部514和进入孔结合部518而与轮325结合。
81.孔结合部514是位于第一旋转部510的中央部且朝向外侧(朝向所要结合的带盒的方向, y轴)突出的构造,其与轮325的结合孔425结合。可以使孔结合部514进入结合孔425而使两者425、514结合,因此,轮325与第一旋转部510结合而不会脱离。
82.一个以上的进入孔结合部518位于从孔结合部514起既已设定的半径上,该进入孔结合部518与轮325的第二进入孔415结合。与孔结合部514相同地、进入孔结合部518也是朝向外侧(朝向所要结合的带盒的方向, y轴)突出的构造,因此,能够进入第二进入孔415并与其结合。然而,第二进入孔415将相对小(与第一进入孔410相比)的面积划分为多个。进入孔结合部518也许会顺利地进入到第二进入孔415中,但根据情况还会存在进入到未形成进入孔的部分(相邻的第二进入孔415之间)的情况。为了防止这种问题,进入孔结合部518的末端(突出的部分)形成为逐渐变窄。另外,进入孔结合部518在带盒110靠过来的情况下,不是停止在一个位置,而是接受来自第一马达610的动力而在一定的角度范围内往复移动。进入孔结合部518以比轮325安放于第一旋转部510而旋转时的速度慢得多的速度往复移动,从而能够进入到形成有进入孔的部分。由于进入孔结合部518的末端和第二进入孔415形成为逐渐变窄,因此,进入孔结合部518一边往复移动一边接近第二进入孔415的附近,从而能够顺利地进入到第二进入孔415中。
83.同样地、第二旋转部520也与带盒110中的轮320结合。在与第二旋转部520结合的轮320上卷绕有进行研磨之前的带,且进行了研磨之后的带卷绕于与第一旋转部510结合的轮325。第二旋转部520不是接受由第一马达610提供的动力,而是由于带330通过第一旋转部510的旋转从轮320卷绕到轮325上而旋转。与第一旋转部510相同地、第二旋转部520也能够包括孔结合部524和进入孔结合部528而与轮320结合。孔结合部524的构造和工作与孔结合部514相同。虽然进入孔结合部528的构造与进入孔结合部518相同,但由于第二旋转部520不是接受从马达提供的动力,因此,进入孔结合部528不能在一定的角度范围内往复移动。由于这种原因,如上所述,第一进入孔410具有相对大于第二进入孔415的面积。因此,即使进入孔结合部528停止,也能够使向未形成有进入孔的部分的进入最小化。
84.第一传感器530感测与为了与研磨装置130结合而接近的带盒110的距离。控制部(未图示)须知道带盒110是否在接近以及是否已完整地安装才能控制第一马达610或第二马达630的工作。因此,第一传感器530感测与接近的带盒110的距离。
85.带固定部540形成带的移动路径以使通过第一旋转部510的旋转而退绕的带330能够沿着一定的路径退绕。通过各旋转部510、520的旋转而从一个轮卷绕到另一个轮的带330须经由尖端550部分才能使带330与缺陷部位摩擦而进行研磨。因此,带固定部540形成于研磨装置130中的带330的移动路径上,以使从一个轮卷绕到另一个轮的带330能够在一定的路径上移动。尤其是,可以形成多个带固定部540,带固定部540形成路径以使带330经过尖端550。
86.尖端550通过第二马达630而向靠近或远离缺陷的方向移动。通过控制部(未图示)的控制,尖端550利用从第二马达630通过缸体570和将在下面描述的主体910提供的动力而
能够以靠近或远离缺陷的方式(在z轴方向上)移动。如上所述,由于带330以经由尖端550的方式被卷绕,因此,在尖端550通过控制部(未图示)的控制而沿着靠近缺陷的方向(-z轴方向)移动的情况下,带330与尖端550一起移动并靠近缺陷且最终能够与缺陷接触。在带330通过尖端550来与缺陷接触的同时,带330通过第一旋转部510和第二旋转部520来被卷绕,因此能够研磨缺陷。在对缺陷的研磨结束的情况下,尖端550通过控制部(未图示)的控制而沿着远离缺陷的方向移动,从而中断研磨。
87.突出部560是朝向外侧(朝向所要结合的带盒的方向, y轴)突出的构造,其与带盒110的第二固定孔240结合而提高结合力。
88.缸体570接受从第二马达630提供的动力而推动或拉动主体910。尖端550由于与主体910连接,因此随主体910的移动而能够靠近或远离缺陷部位。缸体570推动或拉动主体910,从而能够引导尖端550的移动。
89.第一马达610提供使第一旋转部510能够旋转的动力。第一马达610向第一旋转部510提供动力以使安放于第一旋转部510的轮325能够旋转。主要是带330能够从安放于第二旋转部520的轮320卷绕到安放于第一旋转部510的轮325。因此,第一马达610向第一旋转部510提供动力而使轮325旋转,从而即使第二旋转部520不另行接受动力提供也能够卷绕带330。
90.编码器(encoder)620感测第二旋转部520的旋转数。卷绕有进行研磨之前的带330的轮320与第二旋转部520结合。因此,编码器620感测第二旋转部520的旋转数,控制部(未图示)基于第二旋转部520的旋转数而能够确认卷绕于轮320的带330是否已全部退绕。
91.第二马达630向缸体570提供动力以使缸体570能够推动或拉动主体910。
92.第二传感器710和第三传感器720感测与第二旋转部520结合的轮320上的带330是否已全部退绕。其中一个传感器照射光,另一个传感器接收所照射的光。此时,以靠近孔结合部524的方式照射光并以接收该光的角度配置第二传感器710和第三传感器720。因此,在轮320与第二旋转部520结合并存在带330的情况下,从一个传感器照射的光不能被另一个传感器接收。在与第二旋转部520结合的轮320上的带330全部卷绕到轮325上的情况下,第二传感器710和第三传感器720才能照射并接收光。因此,控制部(未图示)根据从一个传感器照射的光是否由另一个传感器接收而能够准确地判断带330是否已全部退绕。控制部(未图示)能够通过编码器620和第二传感器710/第三传感器720把握使用前的带的剩余量以及是否已用尽。
93.连接器810可以实现从外部连接吸气装置(未图示)。连接器810可以实现从外部连接吸气装置(未图示)而向吸入口820提供吸入力。
94.吸入口820接受从外部传递的吸入力而吸入毛刺(burr)等。在尖端550靠近缺陷部位且通过带330来进行研磨的情况下,从缺陷部位产生毛刺(burr)。吸入口820形成于与尖端550相邻的位置(既已设定的半径范围内)而吸入带330的研磨所产生的毛刺,以防由于研磨而产生的毛刺堆积在基板上。
95.控制部(未图示)基于传感器530、710、720和编码器620的感测值而控制第一马达610和第二马达630的工作。
96.控制部(未图示)从第一传感器530接收感测值而控制第一马达610的工作。控制部(未图示)在从第一传感器530判断带盒110是否接近之后,控制第一旋转部510在一定的角
度范围内往复移动。因此,第一旋转部510中的进入孔结合部518能够完整地进入第二进入孔415中。另外,控制部(未图示)在从第一传感器530确认出带盒110已最大限度地接近(带盒已安装并固定到第一旋转部或突出部)的情况下,控制第一马达610以使第一旋转部510旋转而卷绕带330。因此,控制部(未图示)能够使卷绕于轮320的带330卷绕到轮325上并在尖端550上移动。
97.与此同时,控制部(未图示)控制第二马达630,即以使尖端550接近或远离缺陷部位的方式进行控制。在带330通过第一旋转部510的工作而在尖端550上移动的情况下,控制部(未图示)控制第二马达630以使尖端550突出至缺陷部位(未图示)。控制部(未图示)预先从单独的缺陷检测装置接收缺陷的位置信息。因此,控制部(未图示)控制第二马达630,即以使尖端550通过缸体570和主体910来突出到缺陷部位的方式进行控制。控制部(未图示)在对缺陷部位的研磨结束的情况下,控制第二马达630,即以使尖端550远离缺陷部位的方式进行控制。
98.另外,控制部(未图示)在尖端550由于对缺陷部位的研磨全部结束而远离缺陷部位或与第二旋转部520结合的轮320的带330全部卷绕到轮325上的情况下,控制第一马达610以中断动力提供。在缺陷部位的研磨已结束或轮320的带330已全部卷绕到轮325上的情况下,无需第一旋转部510进一步旋转。因此,控制部(未图示)使第一马达610停止以中断第一旋转部510的旋转,从而中断向第一旋转部510的动力提供。
99.图9是图示了根据本发明的一个实施例的研磨装置的工作的模式图。
100.如图9(a)所示,在缸体570未通过第二马达630推动主体910的情况下,尖端550不能靠近缺陷部位。因此,带330不能与缺陷部位接触而研磨缺陷部位。或者,在缸体570通过第二马达630拉动主体910的情况下,尖端550通过主体910来以远离缺陷部位的方式移动。因此,在研磨结束的情况下,尖端550通过这样的工作而能够远离缺陷部位。
101.相反,如图9(b)所示,在缸体570通过第二马达630来推动主体910的情况下,尖端550通过主体910来以靠近缺陷部位的方式移动。带330通过尖端550的移动而与缺陷部位接触,且通过带330的卷绕而进行研磨。
102.主体910在主体910中的一部分包括张力(tension)部920。张力部920由具有弹性的材料具体实现,将主体910以张力部920为基准划分为两个构成部分并连接两者。主体910由缸体570推动或拉动,因而主体910本身或尖端550会受到冲击,且会发生其中一方或双方均损坏的情况。张力部920在主体910中的一部分吸收这种冲击,从而防止一个构成部件或两个构成部件550、910均损坏。
103.在上述的说明中,尖端550和主体910被说明为犹如单独的构成部件,但未必限定于此,主体910的远离缸体570的末端可以具体实现为尖端550。
104.以上的说明只不过是例示性地说明了本实施例的技术思想而已,本领域普通技术人员在不逸出本实施例的本质特性的范围内能够进行多种修改和变形。因此,本发明的各实施例是旨在说明本实施例的技术思想,并非为了限定本实施例的技术思想,本实施例的技术思想的范围并不由这些实施例所限定。本发明的保护范围应由所付的权利要求书所解释,属于与其等同的范围内的所有技术思想应解释为均包括在本发明的权利范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。