技术特征:
1.一种起重机大车扭动检测控制方法,其特征在于,包括如下步骤:利用安装在大车主梁一端的第一激光测距设备检测第一激光测距设备与反光板之间的距离ld1,并将获得的距离ld1反馈给控制器;利用安装在大车主梁另一端的第二激光测距设备检测第二激光测距设备与反光板之间的距离ld2,并将获得的距离ld2反馈给控制器;控制器对ld1和ld2进行差值计算,并获得差值
△
ld,
△
ld=ld1-ld2,若
△
ld在第一距离差值范围内,则起重机正常运行;若
△
ld超出第二距离差值范围,则控制器控制起重机大车停止运行,所述第一距离差值范围位于第二距离差值范围内。2.根据权利要求1所述起重机大车扭动检测控制方法,其特征在于,若
△
ld超出第一距离差值范围且在第二距离差值范围内,则控制器控制提示装置发出提醒信号,且控制器控制起重机大车的运行速度小于或等于设定速度。3.根据权利要求1所述起重机大车扭动检测控制方法,其特征在于,若
△
ld超出第二距离差值范围,则控制器控制报警装置发出报警信号。4.根据权利要求1所述起重机大车扭动检测控制方法,其特征在于,所述反光板安装在起重机的防撞头上。5.根据权利要求1所述起重机大车扭动检测控制方法,其特征在于,还包括大车车轮调整步骤:根据
△
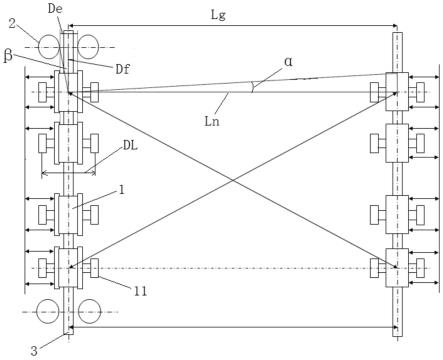
ld调整大车车轮(1)的扭转角度α,直至大车车轮(1)运行n圈时,大车车轮(1)的实际行走距离l1与大车车轮(1)的理论行走距离l2的差值在设定范围内;其中,n为自然数,且n>0,l2=n
×
π
×
d,d为大车车轮(1)的直径。6.根据权利要求5所述起重机大车扭动检测控制方法,其特征在于,所述大车车轮调整步骤还包括如下步骤:起重机小车在大车主梁中间位置时,起重机大车向前运行n圈后停止,第一激光测距设备和第二激光测距设备分别测得ld1和ld2测量值;起重机小车在大车主梁一端时,起重机大车向前运行n圈后停止,第一激光测距设备和第二激光测距设备分别测得ld1和ld2测量值;起重机小车在大车主梁另一端时,起重机大车向前运行n圈后停止,第一激光测距设备和第二激光测距设备分别测得ld1和ld2测量值。7.根据权利要求5所述起重机大车扭动检测控制方法,其特征在于,所述大车车轮调整步骤还包括获取大车车轮(1)的扭转角度为α步骤:根据关系式tanα=|ld1-ld2|/ln换算出大车车轮(1)的扭转角度α,ln为位于大车主梁一端的大车车轮(1)的中心线与位于大车主梁另一端的大车车轮(1)的中心线之间的距离。8.根据权利要求7所述起重机大车扭动检测控制方法,其特征在于,所述大车车轮调整步骤还包括如下步骤:获取大车车轮(1)先运行n圈时,大车车轮(1)的实际行走距离l1;根据计算公式得到轴承(11)的垫片厚度调整值h,其中dl为大车车轮(1)的两个轴承(11)中心线间的距离;再根据计算所得的h对大车车轮(1)的轴承(11)的垫片厚度进行调整。9.根据权利要求7所述起重机大车扭动检测控制方法,其特征在于,还包括准备步骤:
获取导向轮(2)的边缘相对于大车车轮(1)中心线的初始倾斜角度β,在起重机处于启动阶段或停机阶段,若α与β的差值在设定范围内时,控制器控制提示装置发出异常提示信号;在起重机处于正常运行时,若α与β的差值在设定范围内时控制器控制起重机大车的运行速度小于或等于第一设定速度;在起重机处于正常运行时,若α=β时,控制器控制起重机大车的运行速度小于或等于第二设定速度,所述第二设定速度小于第一设定速度。10.根据权利要求9所述起重机大车扭动检测控制方法,其特征在于,获取初始倾斜角度β包括如下步骤:测量分别位于轨道(3)两侧的两个导向轮(2)之间的距离de,并测量导向轮(2)的中心线与大车车轮(1)的中心线沿轨道(3)方向上的距离df,根据tanβ=de/2df,经换算得出初始倾斜角度β。
技术总结
本发明提供一种起重机大车扭动检测控制方法,包括如下步骤:利用安装在大车主梁一端的第一激光测距设备检测第一激光测距设备与反光板之间的距离Ld1,并将获得的距离Ld1反馈给控制器;利用安装在大车主梁另一端的第二激光测距设备检测第二激光测距设备与反光板之间的距离Ld2,并将获得的距离Ld2反馈给控制器;控制器对Ld1和Ld2进行差值计算,并获得差值
技术研发人员:刘洪军 刘腾龙 郝佳 杜爽 陈飞
受保护的技术使用者:中冶宝钢技术服务有限公司
技术研发日:2020.11.28
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。