1.本发明涉及动平衡技术领域,特别是涉及一种高速永磁电机转子动平衡方法及系统。
背景技术:
2.高速永磁电机转速高达10000转/分,具有比功率大、集成化、可靠性高等优点,广泛用于轨道交通车辆、特种车辆、新能源汽车等领域。高速永磁电机转子在制造过程中由于材料质量分布不均匀、机械加工误差以及多个零部件装配偏差的累积与传递容易导致转子质量不平衡分布的随机性和动态性强,高速运行下产生剧烈振动引发破坏性灾难事故。因此必须对制造过程中质量不平衡进行严格控制,动平衡成为高速永磁电机转子制造过程中的关键核心技术。
3.目前主要通过动平衡机来实现生产制造过程中永磁电机转子不平衡量的控制,受现有动平衡机驱动系统和测试精度的限制,高速永磁电机转子动平衡工艺难以实现高速下动平衡,只能提高产品振动等级要求通过低速下动平衡来校正平衡,即动平衡工艺“高速低代”,这种制造工艺主要存在三个问题:(1)永磁电机转子旋转时产生磁场,导致动平衡机摆架下的振动传感器测试信号发生波动,难以真实反映转子质量不平衡振动响应,导致平衡效果不理想;(2)设计具有隔磁功能的装置来屏蔽外部磁场对传感器的影响,需要对动平衡机进行改造,成本高;(3)由于高速永磁电机转子在工作转速下会发生挠曲变形,导致在低速下平衡好转子后,在工作转速下又失衡了。
技术实现要素:
4.本发明的目的是提供一种高速永磁电机转子动平衡方法及系统,克服了电机转子无法在高速下进行动平衡的困难。
5.为实现上述目的,本发明提供了如下方案:
6.一种高速永磁电机转子动平衡方法,包括:
7.根据永磁电机转子在工作转速时的动平衡品质等级和动平衡转速时的动平衡品质等级确定动平衡转速;
8.获得所述永磁电机转子在所述动平衡转速下的振动响应误差;
9.采集所述永磁电机转子在所述动平衡转速下第一测试面的第一振动响应信号和第二测试面的第二振动响应信号;
10.利用所述振动响应误差分别对所述第一振动响应信号和所述第二振动响应信号进行误差补偿,获得第一不平衡振动响应信号和第二不平衡振动响应信号;
11.根据第一不平衡振动响应信号和第二不平衡振动响应信号,采用影响系数法获得所述动平衡转速时所述永磁电机转子的平衡配重;
12.根据所述动平衡转速时所述永磁电机转子的平衡配重,为所述永磁电机转子的配重面设置模拟工作转速下的多组等效平衡配重;
13.获取所述永磁电机转子在多个预设转速下的振动响应,并根据多个预设转速下的振动响应获取所述永磁电机转子的等效不平衡分布;所述多个预设转速均低于预设第一阶临界转速;
14.基于所述永磁电机转子的实际结构、运行参数和等效不平衡分布,构建永磁电机转子-磁钢的有限元动力学方程;
15.根据所述有限元动力学方程,计算所述永磁电机转子在工作转速施加各种所述等效平衡配重后的振动响应,获得振动响应数据库;所述振动响应数据库中各元素包括一组等效平衡配重和对应的振动响应;
16.判断所述振动响应数据库中是否存在小于振动响应阈值的振动响应;
17.若不存在,则基于配重大小或相位对各组等效平衡配重进行划分,获得更新后的多组等效平衡配重,返回步骤“根据所述有限元动力学方程,计算所述永磁电机转子在工作转速施加各种所述等效平衡配重后的振动响应,获得振动响应数据库”;
18.若存在,则输出最小的振动响应对应的等效平衡配重;
19.根据输出的等效平衡配重对所述永磁电机转子进行平衡配重。
20.可选地,所述根据第一不平衡振动响应信号和第二不平衡振动响应信号,采用影响系数法获得所述动平衡转速时所述永磁电机转子的平衡配重,具体包括:
21.根据公式确定所述动平衡转速时所述永磁电机转子的平衡配重;
22.其中,α1、α2、β1和β2均为影响系数,r2(a)为第一不平衡振动响应信号,r2(b)为第二不平衡振动响应信号,u1表示第一配重面平衡配重,u2表示第二配重面平衡配重,所述第一配重面和所述第二配重面均位于所述永磁电机转子上。
23.可选地,所述有限元动力学方程表示为:
[0024][0025]
其中,m为质量矩阵,q为广义位移矢量,表示q的一阶导数,表示q的二阶导数,c为阻尼矩阵,g为陀螺效应矩阵,u为不平衡矢量,ε为偏心距矢量,ω为转子转速,k表示刚度矩阵,i表示等效平衡配重的序号。
[0026]
可选地,所述根据所述有限元动力学方程,计算所述永磁电机转子在工作转速施加各种所述等效平衡配重后的振动响应,获得振动响应数据库,具体包括:
[0027]
求解矩阵的特征根获得永磁电机转子的模态振型;
[0028]
采用模态法计算永磁电机转子在工作转速施加各种所述等效平衡配重后的振动响应ri;
[0029]
其中,i表示单位矩阵,ri=ri(x)=ε1φ1(x) ε2φ2(x),ε1和ε2均为变形系数,φ1(x)为一阶模态振型,φ2(x)为二阶模态振型,x表示转子位置输入。
[0030]
可选地,一组等效平衡配重表示为(u
1i
,u
2i
),u
1i
表示第i组第一配重面的等效平衡配重,u
2i
表示第i组第二配重面的等效平衡配重,所述第一配重面和所述第二配重面均位于所述永磁电机转子上。
[0031]
本发明公开了一种高速永磁电机转子动平衡系统,包括:
[0032]
动平衡转速确定模块,用于根据永磁电机转子在工作转速时的动平衡品质等级和动平衡转速时的动平衡品质等级确定动平衡转速;
[0033]
振动响应误差获取模块,用于获得所述永磁电机转子在所述动平衡转速下的振动响应误差;
[0034]
测试面的振动响应信号采集模块,用于采集所述永磁电机转子在所述动平衡转速下第一测试面的第一振动响应信号和第二测试面的第二振动响应信号;
[0035]
不平衡振动响应信号确定模块,用于利用所述振动响应误差分别对所述第一振动响应信号和所述第二振动响应信号进行误差补偿,获得第一不平衡振动响应信号和第二不平衡振动响应信号;
[0036]
动平衡转速时平衡配重获取模块,用于根据第一不平衡振动响应信号和第二不平衡振动响应信号,采用影响系数法获得所述动平衡转速时所述永磁电机转子的平衡配重;
[0037]
多组等效平衡配重确定模块,用于根据所述动平衡转速时所述永磁电机转子的平衡配重,为所述永磁电机转子的配重面设置模拟工作转速下的多组等效平衡配重;
[0038]
获取所述永磁电机转子在多个预设转速下的振动响应,并根据多个预设转速下的振动响应获取所述永磁电机转子的等效不平衡分布;所述多个预设转速均低于预设第一阶临界转速;
[0039]
有限元动力学方程构建模块,用于基于所述永磁电机转子的实际结构、运行参数和等效不平衡分布,构建永磁电机转子-磁钢的有限元动力学方程;
[0040]
振动响应数据库确定模块,用于根据所述有限元动力学方程,计算所述永磁电机转子在工作转速施加各种所述等效平衡配重后的振动响应,获得振动响应数据库;所述振动响应数据库中各元素包括一组等效平衡配重和对应的振动响应;
[0041]
判断模块,用于判断所述振动响应数据库中是否存在小于振动响应阈值的振动响应;
[0042]
等效平衡配重进行划分模块,用于若不存在小于振动响应阈值的振动响应,则基于配重大小或相位对各组等效平衡配重进行划分,获得更新后的多组等效平衡配重,返回振动响应数据库确定模块;
[0043]
等效平衡配重输出模块,用于若存在小于振动响应阈值的振动响应,则输出最小的振动响应对应的等效平衡配重;
[0044]
平衡配重模块,用于根据输出的等效平衡配重对所述永磁电机转子进行平衡配重。
[0045]
可选地,所述动平衡转速时平衡配重获取模块,具体包括:
[0046]
动平衡转速时平衡配重获取单元,用于根据公式确定所述动平衡转速时所述永磁电机转子的平衡配重;
[0047]
其中,α1、α2、β1和β2均为影响系数,r2(a)为第一不平衡振动响应信号,r2(b)为第二不平衡振动响应信号,u1表示第一配重面平衡配重,u2表示第二配重面平衡配重,所述第一配重面和所述第二配重面均位于所述永磁电机转子上。
[0048]
可选地,所述有限元动力学方程表示为:
[0049][0050]
其中,m为质量矩阵,q为广义位移矢量,表示q的一阶导数,表示q的二阶导数,c为阻尼矩阵,g为陀螺效应矩阵,u为不平衡矢量,ε为偏心距矢量,ω为转子转速,k表示刚度矩阵,i表示等效平衡配重的序号。
[0051]
可选地,所述振动响应数据库确定模块,具体包括:
[0052]
模态振型获取单元,用于求解矩阵的特征根获得永磁电机转子的模态振型;
[0053]
振动响应计算单元,用于采用模态法计算永磁电机转子在工作转速施加各种所述等效平衡配重后的振动响应ri;
[0054]
其中,i表示单位矩阵,ri=ri(x)=ε1φ1(x) ε2φ2(x),ε1和ε2均为变形系数,φ1(x)为一阶模态振型,φ2(x)为二阶模态振型,x表示转子位置输入。
[0055]
可选地,一组等效平衡配重表示为(u
1i
,u
2i
),u
1i
表示第i组第一配重面的等效平衡配重,u
2i
表示第i组第二配重面的等效平衡配重,所述第一配重面和所述第二配重面均位于所述永磁电机转子上。
[0056]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0057]
本发明公开了一种高速永磁电机转子动平衡方法及系统,通过振动信号误差补偿得到真实反映转子不平衡振动响应的信号,为动平衡提供的更准确的数据;根据电机转子动平衡转速下获得的平衡配重,设置多组等效平衡配重模拟电机转子在工作转速时的平衡配重,通过计算振动响应值,确定工作转速时的平衡配重,实现了满足转子高速振动等级要求的低速动平衡,克服了电机转子无法在高速下进行动平衡的困难。
附图说明
[0058]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0059]
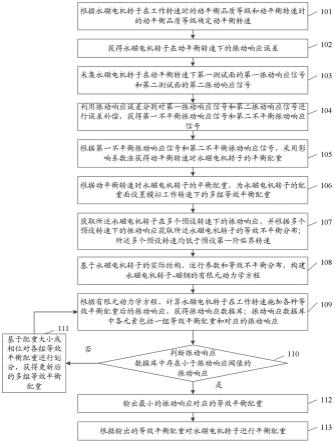
图1为本发明一种高速永磁电机转子动平衡方法流程示意图;
[0060]
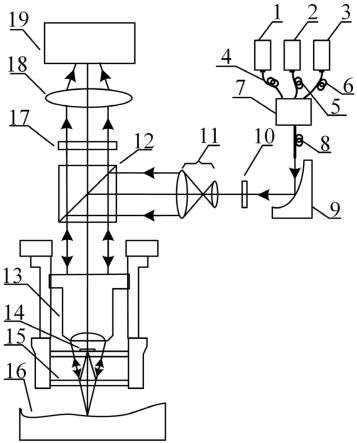
图2为本发明一种高速永磁电机转子动平衡方法原理示意图;
[0061]
图3是高速永磁电机转子系统结构爆炸示意图;
[0062]
图4为本发明高速永磁电机转子动平衡转速时稳态响应图;
[0063]
图5为本发明高速永磁电机转子动平衡结构示意图;
[0064]
图6为本发明一种高速永磁电机转子动平衡系统结构示意图;
[0065]
符号说明:
[0066]
1-4为振动速度传感器,5为键相信号传感器,6为电机,7为弹性连轴节,8-转子,a为第一测试面,b为第二测试面,c为第一配重面,d为第二配重面。
具体实施方式
[0067]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0068]
本发明的目的是提供一种高速永磁电机转子动平衡方法及系统,提高了动平衡的准确性和可靠性。
[0069]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0070]
图1为本发明一种高速永磁电机转子动平衡方法流程示意图,图2为本发明一种高速永磁电机转子动平衡方法原理示意图,如图1-2所示,一种高速永磁电机转子动平衡方法包括以下步骤:
[0071]
步骤101:根据永磁电机转子在工作转速时的动平衡品质等级和动平衡转速时的动平衡品质等级确定动平衡转速。
[0072]
永磁电机转子为高速永磁电机的转子,转子转速最高为10000转/分。
[0073]
若高速永磁电机转子在工作转速ω1下的动平衡品质等级为g2.5,动平衡转速ω2下的品质等级为g1.0,工作转速ω1为12000rpm,根据方程(1)可知,动平衡品质等级与动平衡转速成正比,因此ω2为4800rpm。
[0074]
g=(ω
×
u)/(9549
×
m)
ꢀꢀꢀ
(1)
[0075]
式中,g为动平衡品质等级,u为不平衡量,m为转子质量,ω为转子转速。
[0076]
高速永磁电机转子在动平衡转速时的稳态响应图如图4所示。
[0077]
步骤102:获得永磁电机转子在动平衡转速下的振动响应误差。
[0078]
其中,步骤102具体包括:采用有限元方法确定动平衡转速ω2下永磁电机转子系统磁场分布规律,将考虑外部磁场的转子系统的振动响应测试信号与未考虑外部磁场的振动响应测试信号进行对比,分析动平衡转速ω2下的外部磁场对转子系统振动响应测试信号的影响,获得因外部磁场导致的转子系统振动响应测试误差r0。例如,试电机转子在动平衡转速ω2下的振动响应r,对振动传感器进行隔磁处理,再次测试电机转子在动平衡转速ω2下的振动响应r'。将振动响应r减去r'获得r0。
[0079]
步骤103:采集永磁电机转子在动平衡转速下第一测试面的第一振动响应信号和第二测试面的第二振动响应信号。
[0080]
步骤104:利用振动响应误差分别对第一振动响应信号和第二振动响应信号进行误差补偿,获得第一不平衡振动响应信号和第二不平衡振动响应信号。
[0081]
其中步骤103-104的原理为:考虑磁场对振动速度传感器的影响,获得振动测试信号r1,剔除因外部磁场导致的转子系统振动响应测试误差r0,得到真实反应转子不平衡振动响应的信号r2。
[0082]r1-r0=r2ꢀꢀꢀ
(2)
[0083]
步骤105:根据第一不平衡振动响应信号和第二不平衡振动响应信号,采用影响系数法获得动平衡转速时永磁电机转子的平衡配重(u1,u2)。
[0084]
根据公式
[0085]
其中,α1、α2、β1和β2均为影响系数,r2(a)为第一不平衡振动响应信号,r2(b)为第二不平衡振动响应信号,u1表示第一配重面平衡配重,u2表示第二配重面平衡配重,第一配重面和第二配重面均位于永磁电机转子上,a表示第一测试面,b表示第二测试面,如图5所示。
[0086]
步骤106:根据动平衡转速时永磁电机转子的平衡配重,为永磁电机转子的配重面设置模拟工作转速下的多组等效平衡配重。
[0087]
一组等效平衡配重表示为(u
1i
,u
2i
),u
1i
表示第i组第一配重面的等效平衡配重,u
2i
表示第i组第二配重面的等效平衡配重,第一配重面c和第二配重面d均位于永磁电机转子上,如图5所示。
[0088]
其中,步骤106具体包括,由于永磁电机转子在工作转速下会有微弱的挠曲变形,参照平衡配重(u1,u2),在配重面上设置18种(组)等效平衡配重(u
1i
,u
2i
)(i=1,2
…
18)模拟工作转速ω1下转子动平衡配重。
[0089]
作为具体实施例,18组等效平衡配重如表1所示,第一配重面的等效平衡配重u
1i
=u1,第二配重面的等效平衡配重u
2i
按照相位不同分别6个集合,相位间隔为60度,各集合相位依次间隔60度,各集合中包括3个相位相同的等效平衡配重u
2i
,分别为0.5|u2|,|u2|,和2|u2|。
[0090]
步骤107:获取所述永磁电机转子在多个预设转速下的振动响应,并根据多个预设转速下的振动响应获取所述永磁电机转子的等效不平衡分布;所述多个预设转速均低于预设第一阶临界转速。
[0091]
步骤108:基于永磁电机转子的实际结构、运行参数和等效不平衡分布,构建永磁电机转子-磁钢的有限元动力学方程。
[0092]
永磁电机转子的实际结构为高速永磁电机转子系统的实际结构,高速永磁电机转子系统如图3所示。
[0093]
其中,步骤108具体包括:根据高速永磁电机转子系统结构与尺寸,结合转子在磁场环境中高速运行条件参数,采用接触力学分析滚动轴承与转子装配公差等级下的等效刚度和阻尼,构建转子、滚动轴承和磁钢的三维物理模型,分别获取质量属性,采用集中质量法模化处理,设置等效平衡配重(u
1i
,u
2i
)模拟电机转子的不平衡,建立与实际结构和运行参数相符合的高速永磁电机转子-磁钢有限元动力学方程。
[0094]
有限元动力学方程表示为:
[0095][0096]
其中,m为质量矩阵(惯性矩阵),q为广义位移矢量,表示q的一阶导数,表示q的二阶导数,c为阻尼矩阵,g为陀螺效应矩阵,u为不平衡矢量,ε为偏心距矢量,ω为转子转速,k表示刚度矩阵,i表示等效平衡配重的序号。
[0097]
u={
…
,u
1i
,
…
,u
2i
,
…
}
t
ꢀꢀꢀ
(5)
[0098]
不平衡矢量u除了包括等效平衡配重外还包括其他影响不平衡的分量。
[0099]
步骤109:根据有限元动力学方程,计算永磁电机转子在工作转速施加各种等效平衡配重后的振动响应,获得振动响应数据库;振动响应数据库中各元素包括一组等效平衡
配重和对应的振动响应。
[0100]
振动响应数据库中各元素表示为(u
1i
,u
2i
,ri),如表1所示,ri表示永磁电机转子在工作转速施加等效平衡配重(u
1i
,u
2i
)后的振动响应。
[0101]
表1等效平衡配重与振动响应数据库
[0102]
[0103][0104]
其中,步骤109具体包括:
[0105]
转子系统的固有频率和振型为矩阵a的特征值与特征向量,通过求解方程(6)的特征根获得永磁电机转子临界转速和模态振型φi(x)(i=1,2,
…
,n)
[0106][0107]
由于该实施例永磁电机转子不平衡响应以前二阶模态振型为主,采用模态法计算永磁电机转子在工作转速ω1施加各种等效平衡配(u
1i
,u
2i
)重后的振动响应ri。
[0108]ri
(x)=ε1φ1(x) ε2φ2(x)
ꢀꢀꢀ
(7)
[0109]
其中,i表示单位矩阵,ri(x)=ε1φ1(x) ε2φ2(x),ε1和ε2均为变形系数,φ1(x)为一阶模态振型,φ2(x)为二阶模态振型,x表示转子位置输入。
[0110]
步骤110:判断振动响应数据库中是否存在小于振动响应阈值的振动响应。
[0111]
其中,步骤110具体包括:在振动响应数据库中选择满足工作转速ω1振动等级要求的振动响应ri。
[0112]
若步骤110的输出结果为不存在,则执行步骤111。
[0113]
步骤111:基于配重大小或相位对各组等效平衡配重进行划分,获得更新后的多组等效平衡配重,返回步骤109。
[0114]
其中,步骤111具体包括:进一步划分等效不平衡量组合,对第i组等效平衡配重中第一配重面的等效平衡配重u
1i
保持不变,将第二配重面的等效平衡配重u
2i
划分为0.5|u
2i
|、|u
2i
|和2|u
2i
|,或者增加等效平衡配重的相位,为各等效平衡配重u
2i
增加原相位间隔/2的等效平衡配重,例如原相位间隔为60
°
,当前相位间隔为30
°
,增加|u
2i
|∠30
°
、|u
2i
|∠90
°
、|u
2i
|∠150
°
、|u
2i
|∠210
°
和|u
2i
|∠270
°
的第二配重面的等效平衡配重。
[0115]
若步骤110的输出结果为存在,则执行步骤112。
[0116]
步骤112:输出最小的振动响应对应的等效平衡配重。
[0117]
其中,步骤112具体包括:若有多个振动响应满足要求,选择最小的振动响应ri,进而确定对应的等效平衡配重(u
1i
,u
2i
)。
[0118]
步骤113:根据输出的等效平衡配重对永磁电机转子进行平衡配重。
[0119]
其中,步骤113具体包括:对永磁电机转子进行动平衡,在配重面c(第一配重面)添加平衡配重u
1m
,在配重面d(第二配重面)添加平衡配重u
2m
。
[0120]
第m组等效平衡配重(u
1m
,u
2m
)为输出的等效平衡配重。
[0121]
图6为本发明一种高速永磁电机转子动平衡系统结构示意图,如图6所示,一种高
速永磁电机转子动平衡系统,包括:
[0122]
动平衡转速确定模块201,用于根据永磁电机转子在工作转速时的动平衡品质等级和动平衡转速时的动平衡品质等级确定动平衡转速。
[0123]
振动响应误差获取模块202,用于获得永磁电机转子在动平衡转速下的振动响应误差。
[0124]
测试面的振动响应信号采集模块203,用于采集永磁电机转子在动平衡转速下第一测试面的第一振动响应信号和第二测试面的第二振动响应信号。
[0125]
不平衡振动响应信号确定模块204,用于利用振动响应误差分别对第一振动响应信号和第二振动响应信号进行误差补偿,获得第一不平衡振动响应信号和第二不平衡振动响应信号。
[0126]
动平衡转速时平衡配重获取模块205,用于根据第一不平衡振动响应信号和第二不平衡振动响应信号,采用影响系数法获得动平衡转速时永磁电机转子的平衡配重。
[0127]
多组等效平衡配重确定模块206,用于根据动平衡转速时永磁电机转子的平衡配重,为永磁电机转子的配重面设置模拟工作转速下的多组等效平衡配重。
[0128]
等效不平衡分布获取模块207,用于获取所述永磁电机转子在多个预设转速下的振动响应,并根据多个预设转速下的振动响应获取所述永磁电机转子的等效不平衡分布;所述多个预设转速均低于预设第一阶临界转速。
[0129]
有限元动力学方程构建模块208,用于基于永磁电机转子的实际结构、运行参数和转子等效不平衡分布,构建永磁电机转子-磁钢的有限元动力学方程。
[0130]
振动响应数据库确定模块209,用于根据有限元动力学方程,计算永磁电机转子在工作转速施加各种等效平衡配重后的振动响应,获得振动响应数据库;振动响应数据库中各元素包括一组等效平衡配重和对应的振动响应。
[0131]
判断模块210,用于判断振动响应数据库中是否存在小于振动响应阈值的振动响应。
[0132]
等效平衡配重进行划分模块211,用于若不存在小于振动响应阈值的振动响应,则基于配重大小或相位对各组等效平衡配重进行划分,获得更新后的多组等效平衡配重,返回模块209。
[0133]
等效平衡配重输出模块212,用于若存在小于振动响应阈值的振动响应,则输出最小的振动响应对应的等效平衡配重。
[0134]
平衡配重模块213,用于根据输出的等效平衡配重对永磁电机转子进行平衡配重。
[0135]
动平衡转速时平衡配重获取模块205,具体包括:
[0136]
动平衡转速时平衡配重获取单元,用于根据公式确定动平衡转速时永磁电机转子的平衡配重。
[0137]
其中,α1、α2、β1和β2均为影响系数,r2(a)为第一不平衡振动响应信号,r2(b)为第二不平衡振动响应信号,u1表示第一配重面平衡配重,u2表示第二配重面平衡配重,第一配重面和第二配重面均位于永磁电机转子上。
[0138]
有限元动力学方程表示为:
[0139]
[0140]
其中,m为质量矩阵,q为广义位移矢量,表示q的一阶导数,表示q的二阶导数,c为阻尼矩阵,g为陀螺效应矩阵,u为不平衡矢量,ε为偏心距矢量,ω为转子转速,k表示刚度矩阵,i表示等效平衡配重的序号。
[0141]
振动响应数据库确定模块209,具体包括:
[0142]
模态振型获取单元,用于求解矩阵的特征根获得永磁电机转子的模态振型。
[0143]
振动响应计算单元,用于采用模态法计算永磁电机转子在工作转速施加各种等效平衡配重后的振动响应ri。
[0144]
其中,i表示单位矩阵,ri=ri(x)=ε1φ1(x) ε2φ2(x),ε1和ε2均为变形系数,φ1(x)为一阶模态振型,φ2(x)为二阶模态振型,x表示转子位置输入。
[0145]
一组等效平衡配重表示为(u
1i
,u
2i
),u
1i
表示第i组第一配重面的等效平衡配重,u
2i
表示第i组第二配重面的等效平衡配重,第一配重面和第二配重面均位于永磁电机转子上。
[0146]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0147]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。