1.本发明涉及面形检测技术领域,特别涉及一种面形检测系统及检测方法。
背景技术:
2.随着精密制造技术的不断发展,各种微小结构器件层出不穷,它们广泛运用于航天航空、生物医疗、通信等领域。针对处于加工阶段的微小光学元件而言,通常需要测得其表面微观轮廓信息,进而对其中高频表面加工特性进行评价反馈。
3.显微干涉仪将干涉技术和显微成像技术结合起来,具有高精度、非接触、快速测量的优点。其中米勒干涉仪是迈克尔逊干涉仪的一种改进方式,其近似共路的结构不易引入附加光程差,具有结构紧凑、抗干扰能力强和空间分辨率高等优点。传统的米勒干涉仪是通过压电陶瓷纵向移动显微物镜来实现移相功能,对于机械振动等环境干扰很敏感,同时检测精度也会受到压电陶瓷移动精度限制;其不具备条纹对比度可调的功能,难以满足不同反射率、尤其是低反射率表面高精度检测要求。
4.中国专利申请公布号cn201510808524,申请公布日2016年3月2日,名称为“条纹对比度可调的偏振型米勒干涉装置及测量方法”的发明专利申请文件,公开了一种条纹对比度可调的偏振型米勒干涉的微观轮廓测量方法。该方法利用线栅偏振片进行偏振分光,来实现条纹对比度的可调,但是需要连续转动检偏器来采集5幅相位分别相差90
°
的移相干涉条纹图,采图过程耗时,不适合实时动态测量,同时,单波长移相干涉技术虽然能够实现高精度,但是要求两个相邻像素之间的最大相位差小于π,即连续采样点之间的测试表面最大实际高度差小于λ(λ为光波长),否则2π模糊的问题可能会破坏测量结果,因此其可测面形动态范围较小,从而限制了应用范围。
技术实现要素:
5.本发明要解决的技术问题是提供一种实现多波长移相干涉测量、增大动态范围、测量速度快、精度高的面形检测系统。
6.为了解决上述问题,本发明提供了一种面形检测系统,用于检测待测物的面形,其包括:光耦合单元,包括合束组件和扩束系统,所述合束组件接收一光源发出的rgb三色光,并将所述rgb三色光耦合成一束光;所述扩束系统将耦合后的一束光扩束;米勒偏振干涉单元,包括显微物镜、偏振分光板和参考反射镜,所述显微物镜用于将所述扩束系统扩束后的光会聚;所述偏振分光板,用于将会聚的光分为反射的s偏振光和透射的p偏振光,所述透射的p偏振光作为检测光,检测光经过待测物反射回偏振分光板;所述反射的s偏振光作为参考光,所述参考光经过设置在反射路径上的所述参考反射镜后,被反射回所述偏振分光板;所述偏振分光板将返回的检测光和参考光汇合后,经过显微物镜后射出;
检测计算单元,包括四分之一波片、彩色偏振相机和计算模块,所述四分之一波片用于将从所述显微物镜射出的参考光和检测光变成两束旋向相反的圆偏振光;所述彩色偏振相机用于拍摄所述两束旋向相反的圆偏振光,在彩色偏振相机的四个通道同时得到与rgb三个波长通道分别对应的干涉图;其中,每个波长通道均对应四幅相位差为π/2的干涉图;所述计算模块用于根据每个波长通道对应的四幅相位差为π/2的干涉图的强度分布,利用四步移相算法计算得到rgb三个波长通道分别对应的瞬态相位分布,利用多波长测量技术得到每个像素点上参考光和检测光的光程差,以得到待测物的面形。
7.作为本发明的进一步改进,所述利用四步移相算法计算得到rgb三个波长分别对应的瞬态相位分布,公式如下:其中,为rgb三个波长通道对应的瞬态相位分布;i
ij
为每个波长通道对应的四幅相位差为π/2的干涉图的强度分布;i=r,g,b;j=1,2,3,4;所述利用多波长测量技术得到每个像素点上参考光和检测光的光程差,公式如下:其中,h为每个像素点上参考光和检测光的光程差;;λ
rgb
为λr、λg和λb的等效波长,λr、λg和λb分别为rgb三色光的波长;,λ
rg
是λr与λg的等效波长,λ
gb
是λg与λb的等效波长,,,。
8.作为本发明的进一步改进,所述光源包括第一led光源、第二led光源和第三led光源,所述第一led光源、第二led光源和第三led光源分别用于发出r、g、b三色光。
9.作为本发明的进一步改进,所述合束组件包括第一光纤、第二光纤、第三光纤、光纤合束器和第四光纤,所述第一led光源、第二led光源、第三led光源分别通过第一光纤、第二光纤、第三光纤与所述光纤合束器连接,所述光纤合束器将rgb三色光耦合成一束并进入所述第四光纤。
10.作为本发明的进一步改进,所述面形检测系统还包括偏振片,设置于所述合束组件和扩束系统之间,通过调节偏振片的透光轴方向来调整检测光和参考光之间的相对光强,以提高干涉条纹的对比度。
11.作为本发明的进一步改进,所述面形检测系统还包括准直器,设置于所述合束组件和偏振片之间,用于将耦合后的一束光准直后入射至所述偏振片。
12.作为本发明的进一步改进,所述面形检测系统还包括成像镜头,设置于四分之一波片和彩色偏振相机之间,用于将两束旋向相反的圆偏振光会聚至彩色偏振相机。
13.作为本发明的进一步改进,所述面形检测系统还包括:分光单元,用于将所述扩束系统扩束后的光反射至所述显微物镜,并透射从所述显微物镜射出的参考光和检测光。
14.作为本发明的进一步改进,所述分光单元为分光棱镜。
15.本发明还提供了一种面形检测方法,应用于上述任一所述的面形检测系统,其包括:利用所述合束组件接收所述光源发出的rgb三色光,并将所述rgb三色光耦合成一束光;利用所述扩束系统将耦合后的一束光扩束;利用所述显微物镜将所述扩束系统扩束后的光会聚;利用所述偏振分光板将会聚的光分为反射的s偏振光和透射的p偏振光,所述透射的p偏振光作为检测光,检测光经过待测物反射回偏振分光板;所述反射的s偏振光作为参考光,所述参考光经过设置在反射路径上的所述参考反射镜后,被反射回所述偏振分光板;所述偏振分光板将返回的检测光和参考光汇合后,经过显微物镜后射出;利用四分之一波片将从显微物镜射出的参考光和检测光变成两束旋向相反的圆偏振光;利用所述彩色偏振相机拍摄所述两束旋向相反的圆偏振光,在彩色偏振相机的四个通道同时得到与rgb三个波长通道分别对应的干涉图;其中,每个波长通道均对应四幅相位差为π/2的干涉图;利用所述计算模块计算得到rgb三个波长通道分别对应的瞬态相位分布,并利用多波长测量技术得到每个像素点上参考光和检测光的光程差,以得到待测物的面形。
16.本发明的有益效果:本发明的面形检测系统及方法通过将rgb三色光耦合进入米勒偏振干涉物镜,并采用彩色偏振相机完成rgb三个波长通道的分离和提取,同时利用彩色偏振相机中四个相邻的微偏振片阵列对各个波长通道的干涉图实现步长为π/2的四步移相。本系统不仅能实现多波长移相干涉测量,增大动态测量范围,且通过彩色偏振相机的单次采图即可计算得到rgb三个波长通道的四幅瞬态移相干涉图,具有很强的抗干扰能力,具有高精度、快速测量、低成本的优点。
17.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
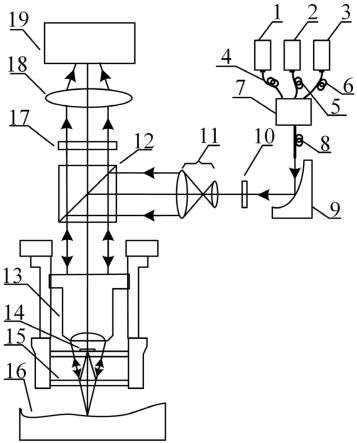
18.图1是本发明优选实施例中面形检测系统的示意图。
19.标记说明:1、第一led光源;2、第二led光源;3、第三led光源;4、第一光纤;5、第二光纤;6、第三光纤;7、光纤合束器;8、第四光纤;9、准直器;10、偏振片;11、扩束系统;12、分光单元;13、显微物镜;14、参考反射镜;15、偏振分光板;16、待测物;17、四分之一波片;18、
成像镜头;19、彩色偏振相机。
具体实施方式
20.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
21.如图1所示,本发明优选实施例公开了一种面形检测系统,用于检测待测物16的面形,其包括光耦合单元、米勒偏振干涉单元和检测计算单元,光耦合单元包括合束组件和扩束系统11,米勒偏振干涉单元包括显微物镜13、偏振分光板15和参考反射镜14,检测计算单元包括四分之一波片17、彩色偏振相机19和计算模块。
22.合束组件接收一光源发出的rgb三色光,并将所述rgb三色光耦合成一束光;扩束系统11将耦合后的一束光扩束;可选地,扩束系统11为扩束器。
23.所述显微物镜13用于将所述扩束系统11扩束后的光会聚;所述偏振分光板15用于将会聚的光分为反射的s偏振光和透射的p偏振光,所述透射的p偏振光作为检测光,检测光经过待测物16反射回偏振分光板15;所述反射的s偏振光作为参考光,所述参考光经过设置在反射路径上的所述参考反射镜14后,被反射回所述偏振分光板15;所述偏振分光板15将返回的检测光和参考光汇合后,经过显微物镜13后射出;进一步地,参考反射镜14的玻璃基底材料和厚度与偏振分光板15玻璃基底的材料和厚度相同,以补偿偏振分光板15玻璃基底引入的像差。
24.在其中一实施例中,显微物镜13的放大倍数为4、数值孔径na为0.13;偏振分光板15对应透射p偏振光的最大透射率t
p
大于82%,反射s偏振光的最大透射率ts小于0.015%,适用波长范围为420nm-700nm,光线允许最大入射半角大于20
°
。
25.四分之一波片17用于将从显微物镜13射出的参考光和检测光变成两束旋向相反的圆偏振光;其中,四分之一波片17的快轴方向与x轴成45
°
夹角。
26.彩色偏振相机19用于拍摄所述两束旋向相反的圆偏振光,在彩色偏振相机19的四个通道同时得到与rgb三个波长通道分别对应的干涉图;其中,每个波长通道均对应四幅相位差为π/2的干涉图。其中,彩色偏振相机的四个通道分别对应透光轴角度为0
°
、45
°
、90
°
和135
°
的四个相邻的微偏振片阵列,可对各个波长通道的干涉图实现步长为π/2的四步移相。
27.计算模块用于根据每个波长通道对应的四幅相位差为π/2的干涉图的强度分布,利用四步移相算法计算得到rgb三个波长通道分别对应的瞬态相位分布,利用多波长测量技术得到每个像素点上参考光和检测光的光程差,以得到待测物16的面形。
28.具体地,所述利用四步移相算法计算得到rgb三个波长分别对应的瞬态相位分布,公式如下:其中,为rgb三个波长通道对应的瞬态相位分布;i
ij
为每个波长通道对应的四幅相位差为π/2的干涉图的强度分布;i=r,g,b;j=1,2,3,4,分别对应透光轴角度为0
°
、45
°
、90
°
和135
°
的干涉图,彩色偏振相机的四个通道的四个方向各自发生了干涉,相邻两个干涉
相位差为π/2,即得到四幅相位差为π/2的干涉图。
29.所述利用多波长测量技术得到每个像素点上参考光和检测光的光程差,公式如下:其中,h为每个像素点上参考光和检测光的光程差;;λ
rgb
为λr、λg和λb的等效波长,λr、λg和λb分别为rgb三色光的波长;,λ
rg
是λr与λg的等效波长,λ
gb
是λg与λb的等效波长,,,。
30.在其中一实施例中,所述光源包括第一led光源1、第二led光源2和第三led光源3,所述第一led光源1、第二led光源2和第三led光源3分别用于发出r、g、b三色光,r、g、b三色光的波长分别为λr、λg和λb。可选地,λr=625nm,λg=530nm,λb=470nm。
31.在其中一实施例中,所述合束组件包括第一光纤4、第二光纤5、第三光纤6、光纤合束器7和第四光纤8,所述第一led光源1、第二led光源2、第三led光源3分别通过第一光纤4、第二光纤5、第三光纤6与所述光纤合束器7连接,所述光纤合束器7将rgb三色光耦合成一束并进入所述第四光纤8。
32.在一些实施例中,所述面形检测系统还包括偏振片10,设置于所述合束组件和扩束系统11之间,通过调节偏振片10的透光轴方向来调整检测光和参考光之间的相对光强,以提高干涉条纹的对比度。由于反射率低的样品反射回来的测试光比参考光弱很多导致条纹对比度不清晰就无法准确测量,通过调节偏振片10透光轴方向可以使得参考光和测试光差不多强度就可以得到对比度好的条纹,从而达到准确测量。
33.在其中一实施例中,所述面形检测系统还包括准直器9,设置于所述合束组件和偏振片10之间,用于将耦合后的一束光准直后入射至所述偏振片10。
34.在一些实施例中,所述面形检测系统还包括成像镜头18,设置于四分之一波片17和彩色偏振相机19之间,用于将两束旋向相反的圆偏振光会聚至彩色偏振相机19。同时,成像镜头18可作为显微物镜13的目镜。
35.在一些实施例中,所述面形检测系统还包括分光单元,用于将所述扩束系统11扩束后的光反射至所述显微物镜13,并透射从所述显微物镜13射出的参考光和检测光。可选地,所述分光单元12为分光棱镜。分光比为1:1。
36.本发明的面形检测系统及方法通过将rgb三色光耦合进入米勒偏振干涉物镜,并采用彩色偏振相机完成rgb三个波长通道的分离和提取以实现色彩灵敏度,同时利用彩色偏振相机中透光轴角度为0
°
、45
°
、90
°
和135
°
的四个相邻的微偏振片阵列对各个波长通道的干涉图实现步长为π/2的四步移相。本系统不仅能实现多波长移相干涉测量,增大动态测量范围,且通过彩色偏振相机的单次采图即可计算得到rgb三个波长通道的四幅瞬态移相干涉图,具有很强的抗干扰能力,具有高精度、快速测量、低成本的优点。
37.本发明优选实施例还公开了一种面形检测方法,应用于上述实施例所述的面形检测系统,其包括:利用所述合束组件接收所述光源发出的rgb三色光,并将所述rgb三色光耦合成一束光;利用所述扩束系统11将耦合后的一束光扩束;利用所述显微物镜13将所述扩束系统扩束后的光会聚;利用所述偏振分光板15用于将会聚的光分为反射的s偏振光和透射的p偏振光,所述透射的p偏振光作为检测光,检测光经过待测物16反射回偏振分光板15;所述反射的s偏振光作为参考光,所述参考光经过设置在反射路径上的所述参考反射镜14后,被反射回所述偏振分光板15;所述偏振分光板15将返回的检测光和参考光汇合后,经过显微物镜13后射出;利用四分之一波片17将从显微物镜13射出的参考光和检测光变成两束旋向相反的圆偏振光;利用所述彩色偏振相机19拍摄所述两束旋向相反的圆偏振光,在彩色偏振相机19的四个通道同时得到与rgb三个波长通道分别对应的干涉图;其中,每个波长通道均对应四幅相位差为π/2的干涉图;利用所述计算模块计算得到rgb三个波长通道分别对应的瞬态相位分布,并利用多波长测量技术得到每个像素点上参考光和检测光的光程差,以得到待测物16的面形。
38.本发明优选实施例的面形检测方法应用于前述的面形检测系统,因此该方法的具体实施方式可见前文中的面形检测系统的实施例部分,所以,其具体实施方式可以参照相应的各个部分实施例的描述,在此不再展开介绍。
39.另外,由于本实施例的面形检测方法应用于前述的面形检测系统,因此其作用与上述系统的作用相对应,这里不再赘述。
40.以上实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。