1.本发明属于农业机械领域,具体涉及基于动轴非圆齿轮差动轮系的双轨迹移栽机构。
背景技术:
2.我国是世界上蔬菜生产大国,同时也是蔬菜的消费大国,随着社会发展,人们对蔬菜需求量在不断增加,能够实现蔬菜的高效种植具有显著的社会价值。蔬菜毯状苗移栽技术是一种高效、简单的移栽技术,该技术逐渐成为蔬菜生产中采用的主要技术手段之一。蔬菜毯苗移栽需要机构完成对毯苗的夹取、输送、开穴和栽植等复杂的移栽动作,且对开穴执行件和移栽臂的运动轨迹和姿态都要比较高的要求;现有的挖穴、取苗一体的移栽机构均为定轴轮系与凸轮副结合实现复合功能,受机构结构限制,虽然能实现预计的开穴轨迹,但姿态不可控,存在开穴动轨迹依然不太理想,导致栽植效果不佳,作业不可靠等问题。
技术实现要素:
3.针对上述问题,本发明提出一种基于动轴非圆齿轮差动轮系结构的移栽机构,该差动轮系能够使开穴执行件和移栽臂按照理想运动轨迹进行运动,且能更好地调节开穴臂和移栽臂的姿态。
4.本发明采用的技术方案如下:
5.本发明基于动轴非圆齿轮差动轮系的双轨迹移栽机构,包括齿轮箱、开穴臂、移栽臂和输入轴。
6.所述的齿轮箱包括壳体一、壳体二、非圆齿轮一、非圆齿轮二、非圆齿轮三、非圆齿轮四、非圆齿轮五、非圆齿轮六、轴一和轴二;所述壳体一的内壁面开设有滑槽一和通孔一,壳体二的内壁面开设有滑槽二和通孔二;所述的通孔一和通孔二同轴线设置;所述的输入轴穿过通孔一与通孔二,并与壳体一固定连接;所述的非圆齿轮一套置在输入轴上;所述轴一的两端分别通过轴承座一和轴承座二支承;所述的轴承座一和轴承座二分别与滑槽一和滑槽二构成滑动副;所述的非圆齿轮二、非圆齿轮三和非圆齿轮四间距固定在轴一上;所述的非圆齿轮二与非圆齿轮一构成齿轮副;所述轴二的一端通过轴承座四支承,另一端穿过轴承座三和壳体二在滑槽一内开设的通孔三;所述的轴承座三和轴承座四分别与滑槽一和滑槽二构成滑动副;所述的非圆齿轮五固定在轴二上,并与非圆齿轮三构成齿轮副;所述非圆齿轮六的轮毂与圆柱齿轮一的轮毂通过牙嵌结构固定连接;所述的非圆齿轮六与圆柱齿轮一均空套在轴二上,且非圆齿轮六与圆柱齿轮一的轮毂牙嵌连接处通过轴承座三支承;所述的非圆齿轮四与非圆齿轮六构成齿轮副;所述的壳体一与壳体二固定连接;所述轴二套置有圆柱齿轮一的一端穿过开穴臂的外壳一上开设的通孔四,并与开穴臂的外壳一固定连接;所述滑槽一内开设有正对的两个弹簧安装孔一,滑槽二内开设有正对的两个弹簧安装孔二;所述的轴承座一和轴承座三与两个弹簧安装孔一分别通过弹簧一连接;所述的轴承座二和轴承座四与两个弹簧安装孔二分别通过弹簧一连接。
7.所述的轴三与轴二平行设置,并与开穴臂的外壳一构成转动副;所述的圆柱齿轮二置于外壳一内,并与轴三固定;所述的圆柱齿轮一与圆柱齿轮二构成齿轮副;所述轴三穿过外壳一开设的通孔五,并与移栽臂的外壳二固定连接;所述移栽臂的凸轮空套在轴三上,并与开穴臂的外壳一固定连接。
8.优选地,所述的开穴臂还包括开穴铲连接架和开穴铲;所述的开穴铲通过开穴铲连接架与外壳一固定连接。
9.更优选地,所述外壳一的开穴铲安装端开设有螺纹孔一,且开穴铲连接架上开设有对应的螺纹孔二;所述外壳一的螺纹孔一与开穴铲连接架的螺纹孔二通过螺柱固定连接。
10.优选地,所述的移栽臂还包括秧针、推秧杆、拨叉、拨叉轴和连接块;所述拨叉轴的两端均与外壳二构成转动副;所述的拨叉中部固定在拨叉轴上;所述拨叉的短杆端与凸轮构成凸轮副;所述的秧针与外壳二固定;所述的推秧杆与外壳二构成滑动副;所述推秧杆的前端位于秧针底部,后端与连接块固定;所述连接块与外壳二的内壁面通过弹簧二连接;所述拨叉的长杆端与连接块上一体成型且间距设置的两个凸环均构成滚动摩擦副。
11.本发明具有的有益效果是:
12.在一个动力输入的情况下,通过设计各非圆齿轮节曲线和两个圆柱齿轮的传动比,能实现开穴铲和秧针的不同预设轨迹运动;同时,基于轴一和轴二可上下浮动设计,使得开穴臂和移栽臂相对于齿轮箱可上下往复运动,从而更好地调节开穴臂和移栽臂的姿态,使得所开穴口形状和栽植效果更为理想,比如本发明能保证在开穴整个过程中,开穴铲姿态角均在90
°
左右。因此,本发明能实现双目标轨迹和姿态要求,以快速实现蔬菜毯状苗的高效自动化移栽。
附图说明
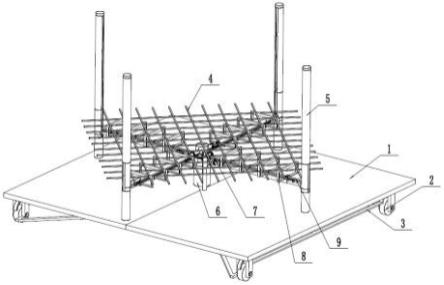
13.图1为本发明的整体结构立体图;
14.图2为本发明中移栽臂和开穴臂的运动轨迹示意图;
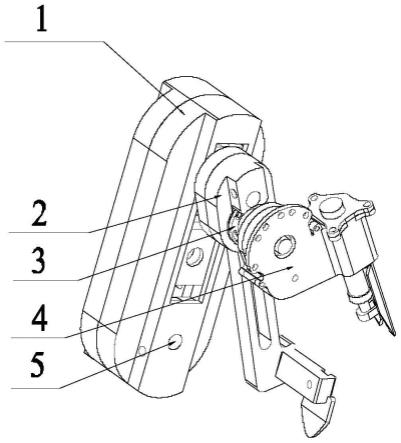
15.图3为本发明去除壳体二后的一个结构立体图;
16.图4为本发明去除壳体二后的另一个结构立体图;
17.图5为本发明中凸轮的装配位置示意图;
18.图6为本发明中移栽臂内部零件的装配示意图;
19.图7为本发明中壳体一的结构立体图;
20.图8为本发明中壳体二的结构立体图;
21.图9为本发明中开穴臂的外壳一结构立体图。
具体实施方式
22.以下结合附图对本发明作进一步说明。
23.本发明基于动轴非圆齿轮差动轮系的双轨迹移栽机构,如图1所示,包括齿轮箱1、开穴臂2、移栽臂4和输入轴5。
24.如图3和4所示,齿轮箱1包括壳体一1-1、壳体二1-13、非圆齿轮一1-9、非圆齿轮二1-5、非圆齿轮三1-6、非圆齿轮四1-7、非圆齿轮五1-3、非圆齿轮六1-2、轴一9和轴二10;如
图7和8所示,壳体一1-1的内壁面开设有滑槽一1-1-1和通孔一1-1-3,壳体二1-13的内壁面开设有滑槽二1-13-1和通孔二1-13-3;通孔一1-1-3和通孔二1-13-3同轴线设置;输入轴5穿过通孔一1-1-3与通孔二1-13-3,并与壳体一1-1固定连接;非圆齿轮一1-9套置在输入轴5上;轴一9的两端分别通过轴承座一1-10和轴承座二1-8支承;轴承座一1-10和轴承座二1-8分别与滑槽一1-1-1和滑槽二1-13-1构成滑动副;非圆齿轮二1-5、非圆齿轮三1-6和非圆齿轮四1-7间距固定在轴一9上;非圆齿轮二1-5与非圆齿轮一1-9构成齿轮副;轴二10的一端通过轴承座四1-4支承(可以是轴二10的两个位置处通过两个轴承与轴承座四1-4连接),另一端穿过轴承座三1-11和壳体二1-13在滑槽一1-1-1内开设的通孔三;轴承座三1-11和轴承座四1-4分别与滑槽一1-1-1和滑槽二1-13-1构成滑动副;非圆齿轮五1-3固定在轴二10上,并与非圆齿轮三1-6构成齿轮副;非圆齿轮六1-2的轮毂与圆柱齿轮一2-5的轮毂通过牙嵌结构固定连接;非圆齿轮六1-2与圆柱齿轮一2-5均空套在轴二10上,且非圆齿轮六1-2与圆柱齿轮一2-5的轮毂牙嵌连接处通过轴承座三1-11支承(可以是牙嵌连接处通过轴承与轴承座三1-11连接);非圆齿轮四1-7与非圆齿轮六1-2构成齿轮副;壳体一1-1与壳体二1-13固定连接(可拆卸);轴二10套置有圆柱齿轮一2-5的一端穿过开穴臂2的外壳一2-1上开设的通孔四2-1-1,并与开穴臂2的外壳一2-1固定连接;滑槽一1-1-1内开设有正对的两个弹簧安装孔一1-1-2,滑槽二1-13-1内开设有正对的两个弹簧安装孔二1-13-2;轴承座一1-10和轴承座三1-11与两个弹簧安装孔一1-1-2分别通过弹簧一1-12连接;轴承座二1-8和轴承座四1-4与两个弹簧安装孔二1-13-2分别通过弹簧一1-12连接。
25.如图4、图5和图9所示,轴三11与轴二10平行设置,并与开穴臂2的外壳一2-1构成转动副;圆柱齿轮二2-4置于外壳一2-1内,并与轴三固定;圆柱齿轮一2-5与圆柱齿轮二2-4构成齿轮副;轴三11穿过外壳一2-1开设的通孔五2-1-2,并与移栽臂4的外壳二4-1固定连接;移栽臂4的凸轮3空套在轴三11上,并与开穴臂2的外壳一2-1固定连接。
26.作为一个优选实施例,如图4和9所示,开穴臂2还包括开穴铲连接架2-2和开穴铲2-3;开穴铲2-3通过开穴铲连接架2-2与外壳一2-1固定连接。
27.作为一个更优选实施例,外壳一2-1的开穴铲安装端开设有螺纹孔一2-1-3,且开穴铲连接架2-2上开设有对应的螺纹孔二;外壳一2-1的螺纹孔一2-1-3与开穴铲连接架2-2的螺纹孔二通过螺柱固定连接。
28.作为一个优选实施例,如图4和6所示,移栽臂4还包括秧针4-2、推秧杆4-3、拨叉4-4、拨叉轴4-5和连接块4-6;拨叉轴4-5的两端均与外壳二4-1构成转动副;拨叉4-4中部固定在拨叉轴4-5上;拨叉4-4的短杆端与凸轮3构成凸轮副;秧针4-2与外壳二4-1固定;推秧杆4-3与外壳二4-1构成滑动副;推秧杆4-3的前端位于秧针4-2底部,后端与连接块4-6固定;连接块4-6与外壳二4-1的内壁面通过弹簧二连接;拨叉4-4的长杆端与连接块4-6上一体成型且间距设置的两个凸环均构成滚动摩擦副。
29.本发明基于动轴非圆齿轮差动轮系的双轨迹移栽机构,工作原理如下:
30.将非圆齿轮一1-9与外部支架固定;输入轴5由外部动力驱动旋转,带动齿轮箱1的壳体一1-1和壳体二1-13转动,使得非圆齿轮二1-5绕非圆齿轮一1-9转动,带动轴一9转动,与轴一9固定连接的非圆齿轮三1-6转动带动非圆齿轮五1-3转动,从而带动轴二10转动,轴二10转动带动与轴二10固定连接的开穴臂2转动;同时,轴一9转动带动非圆齿轮四1-7转动,使得套置在轴二10上的非圆齿轮六1-2绕轴二10转动,非圆齿轮六1-2带动圆柱齿轮一
2-5同步转动,从而带动与圆柱齿轮一2-5啮合的圆柱齿轮二2-4转动;圆柱齿轮二2-4转动带动轴三11转动,轴三11转动带动移栽臂4转动;随着各非圆齿轮间啮合转动,使得轴一9能带动轴承座一1-10和轴承座二1-8分别沿滑槽一1-1-1和滑槽二1-13-1上下往复运动,轴二10能带动轴承座三1-11和轴承座四1-4分别沿滑槽一1-1-1和滑槽二1-13-1上下往复运动,从而使开穴臂2和移栽臂4相对于齿轮箱1进行上下往复运动,在一个动力输入的情况下实现开穴臂2中的开穴铲2-3和移栽臂4中的秧针4-2按预设轨迹(通过设计各非圆齿轮节曲线和两个圆柱齿轮的传动比,能实现开穴铲2-3和秧针4-2的不同预设轨迹,如图2所示,图中轨迹6是秧针4-2的运动轨迹,轨迹7是开穴铲2-3的运动轨迹)运动的同时,基于开穴臂2和移栽臂4相对于齿轮箱1的上下往复运动,可更好地调节开穴臂2和移栽臂4的姿态角,使得所开穴口形状和栽植效果更为理想。
31.开穴臂2中的开穴铲2-3和移栽臂4中的秧针4-2按预设轨迹运动过程中,当移栽臂4运动至蔬菜毯状苗苗盘处时,秧针4-2从蔬菜毯状苗苗盘上抓取秧苗(秧针4-2直接插入毯状苗内并带下来秧苗),此时开穴铲2-3处在低于蔬菜毯状苗苗盘的位置;当移栽臂4完成秧苗抓取动作后并靠近推苗位置前,开穴铲2-3开始进行开穴动作(图2中位置8即为开穴开始位置),随开穴臂2转动,开穴铲2-3完成开穴动作(本发明能保证在开穴整个过程中,开穴铲2-3姿态角均在90
°
左右),此时移栽臂4达到推苗位置,同时凸轮3运行至回程段,连接块4-6在弹簧二(凸轮3在推程段位置时,经拨叉4-4带动连接块4-6已经使弹簧二处于压缩状态)回复力作用下带动推秧杆4-3推出,推秧杆4-3将蔬菜苗推入开好的穴口内,完成移栽动作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。