1.本发明涉及工件连接料带设备领域,尤其是工件连接料带装置。
背景技术:
2.将料带穿过工件的穿孔,然后将穿绕过工件的料带缝起来,完成工件与料带的连接作业。但是现有工件连接料带都是人工完成,因此工作效率较低。
技术实现要素:
3.本发明要解决的技术问题是:为了解决背景技术中描述的技术问题,本发明提供了一种工件连接料带装置。通过多轴机器人配合工件转移机构将工件逐一移动到穿料带工位。通过料带出料机构配合料带水平输送机构将料带穿过工件。通过料带穿绕工件机构将料带绕弯。通过缝纫机将料带的接口缝好。本技术提高了工件连接料带的工作效率。
4.本发明解决其技术问题所采用的技术方案是:
5.一种工件连接料带装置,包括机台、多轴机器人、工件转移机构、料带出料机构、料带水平输送机构、料带穿绕工件机构、料带工件搬运机构、缝纫机、料带工件移出机构、振动盘、ccd相机一、ccd相机二,所述机台上安装有多轴机器人、工件转移机构、料带出料机构、料带水平输送机构、料带穿绕工件机构、料带工件搬运机构、缝纫机、料带工件移出机构、振动盘,振动盘上方安装有ccd相机一,多轴机器人上安装有ccd相机二。
6.具体地,所述工件转移机构由水平线性模组一、升降气缸一、夹爪旋转气缸一、夹爪一、旋转气缸一、气动手指一、ccd相机三、滑台气缸一组成,水平线性模组一的缸体、旋转气缸一的缸体、ccd相机三均固定在机台上,水平线性模组一的滑座上固定有升降气缸一,升降气缸一的活塞杆上固定有滑台气缸一,滑台气缸一的滑座上固定有夹爪旋转气缸一,夹爪旋转气缸一的输出轴上固定有夹爪一,旋转气缸一的输出轴上固定有连接板,连接板两端分别固定有气动手指一。
7.具体地,所述料带出料机构由料带储料仓、导向辊、卷料辊组成,料带储料仓内转动连接有卷料辊,机台上固定有支架,支架上转动连接有数个导向辊。
8.具体地,所述料带水平输送机构由拉料夹爪水平驱动气缸、基座、基座水平移动线性模组、拉料带辊、拉料块、拉料块水平驱动气缸、拉料块升降气缸、刀头、刀头升降气缸、拉料夹爪组成,拉料夹爪水平驱动气缸的缸体和基座水平移动线性模组的缸体均固定在机台上,拉料夹爪水平驱动气缸的活塞杆上固定有拉料夹爪,基座水平移动线性模组的滑座上固定有基座,基座上固定有刀头升降气缸和拉料块水平驱动气缸,刀头升降气缸的活塞杆上固定有刀头,拉料块水平驱动气缸的活塞杆上固定有拉料块升降气缸,拉料块升降气缸的活塞杆上固定有拉料块,基座顶部设有用于传送料带的水平直线流道,基座上转动连接有两个上下排列的拉料带辊,位于下方的拉料带辊固定在电机的输出轴上,位于上方的拉料带辊固定在拉料辊升降气缸的活塞杆上,拉料辊升降气缸的缸体固定在基座上。
9.具体地,所述料带穿绕工件机构由滑台气缸、下层水平驱动气缸、上层水平驱动气
缸、料带夹爪一、料带夹爪二、料带夹爪旋转气缸一、滑块、滑块驱动气缸、连杆、工件夹爪一组成,下层水平驱动气缸的缸体和滑台气缸的缸体均固定在机台上,下层水平驱动气缸的活塞杆上固定有上层水平驱动气缸和料带夹爪旋转气缸一上,上层水平驱动气缸的活塞杆上固定有料带夹爪一,料带夹爪旋转气缸一的活塞杆上固定有圆盘,圆盘边沿处固定有料带夹爪二,滑台气缸的滑座上固定有滑块驱动气缸,滑块驱动气缸的活塞杆上固定有滑块,滑块上设有腰型孔,连杆设有三个端头,连杆第一个端头铰接在滑台气缸的滑座上,连杆第二个端头上转动连接有辊子,辊子置于滑块的腰型孔内,连杆第三个端头上固定有工件夹爪一。
10.具体地,所述料带工件搬运机构由夹爪三、水平线性模组三、滑台气缸三组成,水平线性模组三的缸体固定在机台上,水平线性模组三的滑座上固定有滑台气缸三,滑台气缸三的滑座上水平分布有两个夹爪三。
11.具体地,所述缝纫机上固定有气动手指二,气动手指二的两个手指上分别固定有挡片。
12.具体地,所述料带工件移出机构由x轴水平线性模组四、y轴水平线性模组、升降气缸四、夹爪四组成,x轴水平线性模组四的缸体固定在机台上,x轴水平线性模组四的滑座固定在y轴水平线性模组上,y轴水平线性模组的滑座上固定有升降气缸四,升降气缸四的活塞杆上固定有夹爪四。
13.本发明的有益效果是:本发明提供了一种工件连接料带装置。通过多轴机器人配合工件转移机构将工件逐一移动到穿料带工位。通过料带出料机构配合料带水平输送机构将料带穿过工件。通过料带穿绕工件机构将料带绕弯。通过缝纫机将料带的接口缝好。本技术提高了工件连接料带的工作效率。
附图说明
14.下面结合附图和实施例对本发明进一步说明。
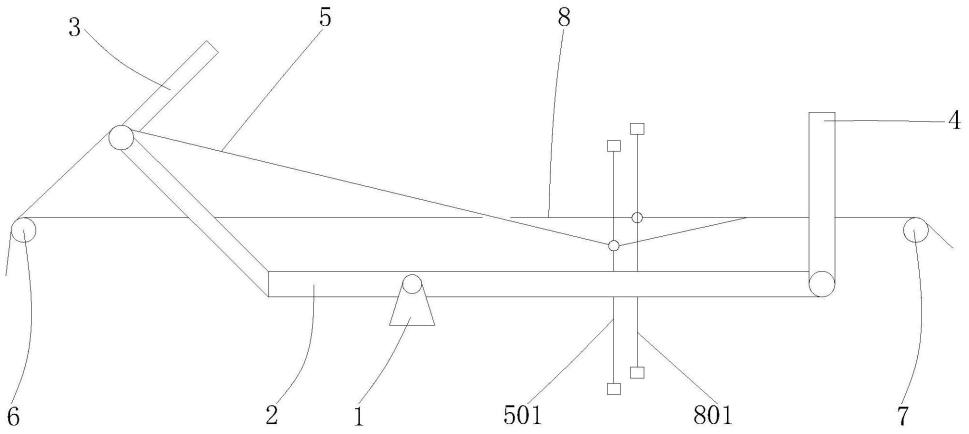
15.图1是本发明的结构示意图;
16.图2是本发明的工件转移机构的结构示意图;
17.图3是本发明的料带出料机构的结构示意图;
18.图4是本发明的料带水平输送机构的结构示意图;
19.图5是本发明的料带穿绕工件机构的结构示意图;
20.图6是本发明的料带工件搬运机构的结构示意图;
21.图7是本发明的料带工件移出机构的结构示意图;
22.图8是本发明的缝纫机的结构示意图;
23.图中 1.机台,2.多轴机器人,3.工件转移机构,4.料带出料机构,5.料带水平输送机构,6.料带穿绕工件机构,7.料带工件搬运机构,8.缝纫机,9.料带工件移出机构,10.振动盘,11.ccd相机一,12.ccd相机二,13.气动手指二,14.挡片,31.水平线性模组一,32.升降气缸一,33.夹爪旋转气缸一,34.夹爪一,35.旋转气缸一,36.气动手指一,37.ccd相机三,38.滑台气缸一,41.料带储料仓,42.导向辊,43.卷料辊,50.拉料夹爪水平驱动气缸,51.基座,52.基座水平移动线性模组,53.拉料带辊,54.拉料块,55.拉料块水平驱动气缸,56.拉料块升降气缸,57.刀头,58.刀头升降气缸,59.拉料夹爪,60.滑台气缸,61.下层水平
驱动气缸,62.上层水平驱动气缸,63.料带夹爪一,64.料带夹爪二,65.料带夹爪旋转气缸一,66.滑块,67.滑块驱动气缸,68.连杆,69.工件夹爪一,71.夹爪三,72.水平线性模组三,73.滑台气缸三,91.x轴水平线性模组四,92.y轴水平线性模组,93.升降气缸四,94.夹爪四。
具体实施方式
24.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。图1是本发明的结构示意图;图2是本发明的工件转移机构的结构示意图;图3
25.是本发明的料带出料机构的结构示意图;图4是本发明的料带水平输送机构的结构示意图;图5是本发明的料带穿绕工件机构的结构示意图;图6是本发明的料带工件搬运机构的结构示意图;图7是本发明的料带工件移出机构的结构示意图;图8是本发明的缝纫机的结构示意图。
26.如附图1所示,一种工件连接料带装置,包括机台1、多轴机器人2、工件转移机构3、料带出料机构4、料带水平输送机构5、料带穿绕工件机构6、料带工件搬运机构7、缝纫机8、料带工件移出机构9、振动盘10、ccd相机一11、ccd相机二12,所述机台1上安装有多轴机器人2、工件转移机构3、料带出料机构4、料带水平输送机构5、料带穿绕工件机构6、料带工件搬运机构7、缝纫机8、料带工件移出机构9、振动盘10,振动盘10上方安装有ccd相机一11,多轴机器人2上安装有ccd相机二12。
27.如附图2所示,工件转移机构3由水平线性模组一31、升降气缸一32、夹爪旋转气缸一33、夹爪一34、旋转气缸一35、气动手指一36、ccd相机三37、滑台气缸一38组成,水平线性模组一31的缸体、旋转气缸一35的缸体、ccd相机三37均固定在机台1上,水平线性模组一31的滑座上固定有升降气缸一32,升降气缸一32的活塞杆上固定有滑台气缸一38,滑台气缸一38的滑座上固定有夹爪旋转气缸一33,夹爪旋转气缸一33的输出轴上固定有夹爪一34,旋转气缸一35的输出轴上固定有连接板,连接板两端分别固定有气动手指一36。
28.旋转气缸一35的输出轴可以驱使连接板旋转,从而可以调换连接板两端的气动手指一36依次摆动至取件工位。水平线性模组一31可以带动夹爪一34左右水平移动,升降气缸一32可以带动夹爪一34上下移动,滑台气缸一38可以带动夹爪一34前后水平移动,夹爪旋转气缸一33可以摆动夹爪一34至不同的朝向。
29.如附图3所示,料带出料机构4由料带储料仓41、导向辊42、卷料辊43组成,料带储料仓41内转动连接有卷料辊43,机台1上固定有支架,支架上转动连接有数个导向辊42。
30.一卷料带卷绕在卷料辊43上,料带绕过数个导向辊42后穿入料带水平输送机构5内。
31.如附图4所示,料带水平输送机构5由拉料夹爪水平驱动气缸50、基座51、基座水平移动线性模组52、拉料带辊53、拉料块54、拉料块水平驱动气缸55、拉料块升降气缸56、刀头57、刀头升降气缸58、拉料夹爪59组成,拉料夹爪水平驱动气缸50的缸体和基座水平移动线性模组52的缸体均固定在机台1上,拉料夹爪水平驱动气缸50的活塞杆上固定有拉料夹爪59,基座水平移动线性模组52的滑座上固定有基座51,基座51上固定有刀头升降气缸58和拉料块水平驱动气缸55,刀头升降气缸58的活塞杆上固定有刀头57,拉料块水平驱动气缸
55的活塞杆上固定有拉料块升降气缸56,拉料块升降气缸56的活塞杆上固定有拉料块54,基座51顶部设有用于传送料带的水平直线流道,基座51上转动连接有两个上下排列的拉料带辊53,位于下方的拉料带辊53固定在电机的输出轴上,位于上方的拉料带辊53固定在拉料辊升降气缸的活塞杆上,拉料辊升降气缸的缸体固定在基座51上。
32.拉料夹爪水平驱动气缸50可以驱使拉料夹爪59水平移动。基座水平移动线性模组52可以驱使基座51及基座51上的所有机构水平移动。当拉料带辊53要拉动料带时,拉料辊升降气缸的活塞杆驱使位于上方的拉料带辊53往下移动,直到上下两个拉料带辊53夹住料带,接着电机驱使下方的拉料带辊53旋转,从而拉动料带在基座51上水平移动。当拉料块54要拉动料带时,拉料块升降气缸56驱使拉料块54往下移动,直到拉料块54将料带压在基座51上,接着拉料块水平驱动气缸55驱使拉料块54水平移动,拉料块54就会拉动料带往前水平移动。刀头升降气缸58驱使刀头57升降可以用于切断料带。
33.如附图5所示,料带穿绕工件机构6由滑台气缸60、下层水平驱动气缸61、上层水平驱动气缸62、料带夹爪一63、料带夹爪二64、料带夹爪旋转气缸一65、滑块66、滑块驱动气缸67、连杆68、工件夹爪一69组成,下层水平驱动气缸61的缸体和滑台气缸60的缸体均固定在机台1上,下层水平驱动气缸61的活塞杆上固定有上层水平驱动气缸62和料带夹爪旋转气缸一65上,上层水平驱动气缸62的活塞杆上固定有料带夹爪一63,料带夹爪旋转气缸一65的活塞杆上固定有圆盘,圆盘边沿处固定有料带夹爪二64,滑台气缸60的滑座上固定有滑块驱动气缸67,滑块驱动气缸67的活塞杆上固定有滑块66,滑块66上设有腰型孔,连杆68设有三个端头,连杆68第一个端头铰接在滑台气缸60的滑座上,连杆68第二个端头上转动连接有辊子,辊子置于滑块66的腰型孔内,连杆68第三个端头上固定有工件夹爪一69。
34.下层水平驱动气缸61可以带动料带夹爪一63和料带夹爪二64往前水平移动,上层水平驱动气缸62可以带动料带夹爪一63往前水平移动。料带夹爪旋转气缸一65可以带动料带夹爪二64沿着圆盘的圆周来回摆动。当滑块驱动气缸67驱使滑块66水平来回移动,可以通过腰型孔内的辊子带动连杆68沿着其第一个端头的轴进行摆动,使得连杆68可以带动工件夹爪一69来回摆动。滑台气缸60可以带动滑块驱动气缸67和工件夹爪一69进行水平移动。
35.如附图6所示,料带工件搬运机构7由夹爪三71、水平线性模组三72、滑台气缸三73组成,水平线性模组三72的缸体固定在机台1上,水平线性模组三72的滑座上固定有滑台气缸三73,滑台气缸三73的滑座上水平分布有两个夹爪三71。
36.水平线性模组三72可以带动夹爪三71进行左右水平移动,滑台气缸三73可以带动夹爪三71进行前后水平移动。
37.如附图8所示,缝纫机8上固定有气动手指二13,气动手指二13的两个手指上分别固定有挡片14。
38.当工件及料带被放置在缝纫机8机台上的定位槽内之后,工件及料带位于两个挡片14之间,此时气动手指二13驱使两个挡片14分别朝着工件及料带的方向移动,就可以防止工件及料带在缝线的时候移动。
39.如附图7所示,料带工件移出机构9由x轴水平线性模组四91、y轴水平线性模组92、升降气缸四93、夹爪四94组成,x轴水平线性模组四91的缸体固定在机台1上,x轴水平线性模组四91的滑座固定在y轴水平线性模组92上,y轴水平线性模组92的滑座上固定有升降气
缸四93,升降气缸四93的活塞杆上固定有夹爪四94。
40.x轴水平线性模组四91可带动夹爪四94前后水平移动,y轴水平线性模组92可带动夹爪四94左右水平移动,升降气缸四93可带动夹爪四94上下移动。
41.本技术的工作方式为,首先ccd相机一11将图像信息送入plc,由plc判断要抓起的工件的位置,plc控制多轴机器人2通过吸嘴将工件取出,而多轴机器人2上的ccd相机二12则可以判断振动盘10上工件的正反。
42.接着将取出的工件移动至ccd相机三37上方,ccd相机三37将工件图像传送至plc,由plc判断该工件前后朝向是否正确,plc控制多轴机器人2调整好工件朝向后放置到右端气动手指一36处,气动手指一36夹住工件后,由旋转气缸一35将工件摆动至取件位置。最后由夹爪一34将工件夹住并移动至工件夹爪一69处,滑块驱动气缸67配合连杆68驱使工件夹爪一69及工件呈竖直状态。此时工件的穿孔位于拉料块54前方。
43.料带从料带出料机构4处抽出,并穿过基座51上的水平直线流道,拉料块54将料带压在基座51上。接着基座水平移动线性模组52驱使基座51往前水平移动,并且拉料块水平驱动气缸55驱使拉料块54带着料带往前穿过工件的穿孔。当料带穿过工件穿孔后,拉料夹爪水平驱动气缸50驱使拉料夹爪59往前方移动并夹住料带端头,然后拉料夹爪59反向移动,就可以将料带继续穿过工件一段长度。接着料带夹爪一63和料带夹爪二64往前移动并分别夹住料带,拉料夹爪59放开料带,此时的料带夹爪一63和料带夹爪二64分别位于工件的左右两侧。接着料带夹爪旋转气缸一65驱使料带夹爪二64沿着圆盘摆动,直到将料带夹爪二64和料带夹爪一63位于工件的一侧,这样料带就被绕弯成u形,最后刀头57往下移动,将料带切断。切断料带之后拉料块54放开料带,基座51回退复位的同时,上下两个拉料带辊53拉动料带沿着基座51往前移动,等待下一次的送料带作业。
44.当料带穿绕好工件之后,两个夹爪三71移动至工件料带处,其中一个夹爪三71夹住工件,另一个夹爪三71夹住u形料带的上下两层,再将工件和料带送到缝纫机8的机台上的定位槽内,由缝纫机8将料带两端头缝在一起。最后料带工件移出机构9将缝纫机8上的工件料带移走。
45.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。