一种骨科护理用下肢训练康复装置及监护控制系统
1.技术领域
2.本发明属于骨科护理技术领域,特别是涉及一种骨科护理用下肢训练康复装置及监护控制系统。
3.
背景技术:
4.下肢骨关节损伤之后需要进行适当的康复训练,用以促进受伤关节的痊愈。在骨科护理过程中,为了避免过度锻炼对受伤关节的二次伤害,需要在康复训练过程中进行充分保护。
5.
技术实现要素:
6.本发明的目的在于提供一种骨科护理用下肢训练康复装置及监护控制系统,通过对下肢关节部分进行可变动的固定调整和转动阻尼调整,解决了康复训练过程中保护不充分的问题。
7.为解决上述技术问题,本发明是通过以下技术方案实现的:本发明提供一种骨科护理用下肢训练康复装置及监护控制系统,包括,肢体可变固定器,用于固定所述下肢的关节的两端;支架体,用于固定连接所述肢体可变固定器;可变阻尼轴,包括两个自由端,两个所述自由端分别固定连接至所述支架体,所述肢体可变固定器围绕所述可变阻尼轴转动;控制器,用于控制所述肢体可变固定器的固定强度,控制所述可变阻尼轴的转动阻尼,保持所述关节承受的压力不超过设定值。
8.在本发明的一个实施例中,所述肢体可变固定器包括,壳体,具有容纳所述下肢的筒形部;夹持部,包括若干个气囊,若干个所述气囊设置于所述筒形部的内壁,所述气囊表面设置摩擦部;气泵,用于对若干个所述气囊进行充气和放气,所述气泵受所述控制器的控制进行充气和放气操作,当所述气囊处于充气状态时,所述摩擦部抵接摩擦所述下肢。
9.在本发明的一个实施例中,所述控制器包括,状态检测模块,用于检测所述下肢的下肢受力状态;逻辑处理模块,若检测到所述下肢受力状态低于设置值时,所述肢体可变固定器降低对所述下肢的固定强度,所述可变阻尼轴的转动阻尼降低;若检测到所述下肢受力状态高于设置值时,所述肢体可变固定器增加对所述下肢的固定强度,所述可变阻尼轴的转动阻尼增加。
10.在本发明的一个实施例中,所述检测所述下肢的运动状态的步骤,包括,获取两个所述自由端的相对转动角度,标记为下肢转动角度;构建所述下肢转动角度与对应的所述下肢的肢体受力状况的映射关系,标记为肢体角度受力映射;实时获取下肢运动过程中两个所述自由端的所述下肢转动角度;根据所述下肢转动角度,检索所述肢体角度受力映射,获取所述下肢的运动状态。
11.在本发明的一个实施例中,所述根据所述下肢转动角度,检索所述肢体角度受力映射,获取所述下肢的运动状态的步骤,包括,获取所述肢体角度受力映射中的所述下肢转动角度和所述下肢的肢体受力状况;将所述下肢转动角度顺序线性排列,获取相邻的两个所述下肢转动角度的中值点,将每个所述下肢转动角度相邻的两个中值点对应的范围作为下肢转动角度域;构建所述下肢转动角度域与对应的所述下肢的肢体受力状况的映射关系,标记为肢体角度域受力映射;判断实时获取的所述下肢转动角度对应的所述下肢转动角度域;检索所述肢体角度域受力映射,得到实时获取的所述下肢转动角度对应的所述下肢的肢体受力状况。
12.在本发明的一个实施例中,所述检测所述下肢的运动状态的步骤,包括,将若干个应变片设置于所述下肢的关节两端的肌肉对应的皮肤的表面,并记录若干个所述应变片之间的初始相对坐标;当所述肌肉收缩或舒张牵引所述皮肤的表面发生形变,记录若干个所述应变片相对于所述初始相对坐标的坐标变化值;构建所述坐标变化值与对应的所述下肢的肢体受力状况的映射关系,标记为坐标变化受力映射;实时获取下肢运动过程中的所述坐标变化值;根据所述坐标变化值,检索所述坐标变化受力映射,获取所述下肢的运动状态。
13.在本发明的一个实施例中,所述控制器执行以下步骤,获取两个所述自由端的相对转动角度,标记为下肢转动角度;构建所述下肢转动角度与对应的所述下肢的肢体受力状况的映射关系,标记为肢体角度受力映射;将若干个应变片设置于所述下肢的关节两端的肌肉对应的皮肤的表面,并记录若干个所述应变片之间的初始相对坐标;当所述肌肉收缩或舒张牵引所述皮肤的表面发生形变,记录若干个所述应变片相对于所述初始相对坐标的坐标变化值;构建所述坐标变化值与对应的所述下肢的肢体受力状况的映射关系,标记为坐标变化受力映射;实时获取下肢运动过程中两个所述自由端的所述下肢转动角度;根据所述下肢转动角度,检索所述肢体角度受力映射,获取所述下肢的运动状态,标记为下肢预处理运动状态;所述逻辑处理模块根据所述下肢预处理运动状态对所述肢体可变固定器和所述
可变阻尼轴进行预控制;实时获取下肢运动过程中的所述坐标变化值;根据所述坐标变化值,检索所述坐标变化受力映射,获取所述下肢的运动状态,标记为下肢精确处理运动状态;所述逻辑处理模块根据所述下肢精确处理运动状态对所述肢体可变固定器和所述可变阻尼轴进行精确控制。
14.在本发明的一个实施例中,所述控制器还包括头部电极贴片,所述头部电极贴片用于检测脑部生物电,并且执行以下步骤,在下肢训练过程中,实时获取头部生物电波形;当用户察觉疼痛,则将对应的所述头部生物电波形标记为疼痛波形;获取用户疼痛波形所对应的所述下肢转动角度和所述坐标变化值,分别标记为下肢疼痛转动角度和疼痛坐标变化值;当检测所述下肢转动角度邻近所述下肢疼痛转动角度,和/或所述坐标变化值邻近所述疼痛坐标变化值,则提醒用户。
15.在本发明的一个实施例中,所述控制器还执行以下步骤,当用户察觉疼痛,将疼痛程度进行轻重分级;将所述疼痛波形按照轻重程度进行标记;根据所述疼痛波形和对应的疼痛程度标记结果获取所述下肢疼痛转动角度和/或所述疼痛坐标变化值的邻近值。
16.在本发明的一个实施例中,所述根据所述疼痛波形和对应的疼痛程度标记结果获取所述下肢疼痛转动角度和/或所述疼痛坐标变化值的邻近值的步骤,包括,将疼痛程度设定为正值,疼痛程度和轻重与数值正相关;将所述疼痛程度作为输入值,所述疼痛波形作为输出值,对预测模型进行训练,得到疼痛预测模型;将设定的负值输入疼痛预测模型,得到邻近疼痛波形;根据所述邻近疼痛波形得到所述下肢疼痛转动角度和/或所述疼痛坐标变化值的邻近值。
17.本发明在患者康复训练过程中,检测下肢的受力状态以及身体特征,判断下肢受力是否超过设定值,若超过设定值则可变固定器增加对下肢的固定强度,可变阻尼轴的转动阻尼增加,让肢体可变固定器和可变阻尼轴承担关节负重。当下肢受力状态低于设置值时,肢体可变固定器降低对下肢的固定强度,可变阻尼轴的转动阻尼降低,避免阻碍下肢血液流动,通过对下肢关节部分进行可变动的固定调整和转动阻尼调整,解决了康复训练过程中保护不充分的问题。当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
18.附图说明
19.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领
域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为本发明所述肢体可变固定器于一实施例的剖面示意图;图2为本发明所述控制器于一实施例的模块示意图;图3为本发明所述控制器于一实施例的功能逻辑示意图;图4为本发明所述检测所述下肢的运动状态的步骤于一实施例的流程示意图;图5为本发明所述根据所述下肢转动角度,检索所述肢体角度受力映射,获取所述下肢的运动状态的步骤于一实施例的流程示意图;图6为本发明所述检测所述下肢的运动状态的步骤于一实施例的流程示意图;图7为本发明所述控制器执行步骤于一实施例的流程示意图一;图8为本发明所述控制器执行步骤于一实施例的流程示意图二;图9为本发明所述控制器执行步骤于一实施例的流程示意图三;图10为本发明所述根据所述疼痛波形和对应的疼痛程度标记结果获取所述下肢疼痛转动角度和/或所述疼痛坐标变化值的邻近值的步骤于一实施例的流程示意图。
21.附图中,各标号所代表的部件列表如下:1-肢体可变固定器,11-壳体,12-气囊,13-摩擦部;4-控制器,41-状态检测模块,42-逻辑处理模块。
22.具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
24.为了提高下肢康复训练过程中的安全性,本发明提供以下方案。
25.请参阅图1至3所示,本发明提供了一种骨科护理用下肢训练康复装置及监护控制系统,可以包括肢体可变固定器、支架体、可变阻尼轴以及控制器。在本方案中,肢体可变固定器可以用于固定下肢的关节的两端,支架体用于固定连接肢体可变固定器,可变阻尼轴包括两个自由端,这两个自由端分别固定连接至支架体,肢体可变固定器围绕可变阻尼轴转动。当肢体可变固定器固定下肢关节的两端时候,当下肢弯曲的时候,可变阻尼轴也会转动,可变阻尼轴的阻尼作用起到保护关节的作用。但是为了避免肢体可变固定器长时间保持固定强度导致下肢血液不通畅,需要根据下肢的运动承压状态调整可变固定器的固定强度和可变阻尼轴的转动阻尼。具体而言,控制器可以用于控制肢体可变固定器的固定强度,控制可变阻尼轴的转动阻尼,保持关节承受的压力不超过设定值。
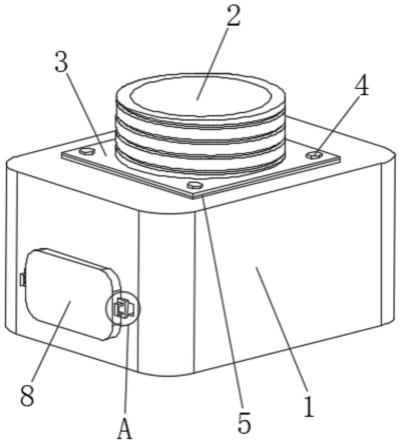
26.请参阅图1所示,肢体可变固定器可以包括壳体、夹持部以及气泵。壳体可以具有容纳下肢的筒形部。夹持部可以包括若干个气囊,气囊设置于筒形部的内壁,气囊表面设置摩擦部。气泵可以用于对若干个气囊进行充气和放气,气泵受控制器的控制进行充气和放气操作,能够避免下肢血流不畅,当气囊处于充气状态时,摩擦部抵接摩擦下肢,避免壳体脱落。
27.请参阅图2和3所示,控制器可以包括状态检测模块和逻辑处理模块。状态检测模块用于检测下肢的下肢受力状态。逻辑处理模块用于进行逻辑计算,若检测到下肢受力状态低于设置值时,肢体可变固定器降低对下肢的固定强度,可变阻尼轴的转动阻尼降低。若检测到下肢受力状态高于设置值时,肢体可变固定器增加对下肢的固定强度,可变阻尼轴的转动阻尼增加。通过上述方式实现对肢体可变固定器和可变阻尼轴的控制,最终解决康复训练过程中保护不充分的问题,并且还避免血流不畅的问题。
28.请参阅图4所示,步骤s1检测下肢的运动状态的步骤可以首先执行步骤s111获取两个自由端的相对转动角度,标记为下肢转动角度。之后可以执行步骤s112构建下肢转动角度与对应的下肢的肢体受力状况的映射关系,标记为肢体角度受力映射。接下来可以执行步骤s113实时获取下肢运动过程中两个自由端的下肢转动角度。最后可以执行步骤s114根据下肢转动角度,检索肢体角度受力映射,获取下肢的运动状态。通过检索预先构建的肢体角度受力映射,能够通过检测下肢转动角度首先对下肢的肢体受力状况的检测,避免下肢关节受力过大影响康复。
29.请参阅图5所示,步骤s114根据下肢转动角度,检索肢体角度受力映射,获取下肢的运动状态的步骤,首先可以执行s1141获取肢体角度受力映射中的下肢转动角度和下肢的肢体受力状况。之后可以执行步骤s1142将下肢转动角度顺序线性排列,获取相邻的两个下肢转动角度的中值点,将每个下肢转动角度相邻的两个中值点对应的范围作为下肢转动角度域。接下来可以执行步骤s1143构建下肢转动角度域与对应的下肢的肢体受力状况的映射关系,标记为肢体角度域受力映射。接下来可以执行步骤s1144判断实时获取的下肢转动角度对应的下肢转动角度域。最后可以执行步骤s1145检索肢体角度域受力映射,得到实时获取的下肢转动角度对应的下肢的肢体受力状况。由于肢体角度受力映射中并未包含全部的下肢转动角度状况,因此通过步骤s1141至步骤s1143构建肢体角度域受力映射,能够获取多种情况的下肢转动角度所对应的下肢的肢体受力状况。
30.请参阅图6所示,步骤s1检测下肢的运动状态的步骤可以按照以下方式执行。首先可以执行步骤s121将若干个应变片设置于下肢的关节两端的肌肉对应的皮肤的表面,并记录若干个应变片之间的初始相对坐标。接下来可以执行步骤s122当肌肉收缩或舒张牵引皮肤的表面发生形变,记录若干个应变片相对于初始相对坐标的坐标变化值。接下来可以执行步骤s123构建坐标变化值与对应的下肢的肢体受力状况的映射关系,标记为坐标变化受力映射。接下来可以执行步骤s124实时获取下肢运动过程中的坐标变化值。最后可以执行步骤s125根据坐标变化值,检索坐标变化受力映射,获取下肢的运动状态。肌肉在发力过程中会导致对应皮肤发生形变,通过检测皮肤的形变量既可以实现对肌肉是否发力以及发力程度的检测,通过构建坐标变化受力映射,可以定量获得下肢的运动状态,提高对下肢运动状态的检测效率。
31.请参阅图7所示,控制器可以执行以下步骤用以实现对肢体可变固定器和可变阻尼轴的控制。首先执行步骤s131获取两个自由端的相对转动角度,标记为下肢转动角度。接下来可以执行步骤s132构建下肢转动角度与对应的下肢的肢体受力状况的映射关系,标记为肢体角度受力映射。接下来可以执行步骤s133将若干个应变片设置于下肢的关节两端的肌肉对应的皮肤的表面,并记录若干个应变片之间的初始相对坐标。接下来可以执行步骤s134当肌肉收缩或舒张牵引皮肤的表面发生形变,记录若干个应变片相对于初始相对坐标
的坐标变化值。接下来可以执行步骤s135构建坐标变化值与对应的下肢的肢体受力状况的映射关系,标记为坐标变化受力映射。接下来可以执行步骤s136实时获取下肢运动过程中两个自由端的下肢转动角度。接下来可以执行步骤s137根据下肢转动角度,检索肢体角度受力映射,获取下肢的运动状态,标记为下肢预处理运动状态。接下来可以执行步骤s138逻辑处理模块根据下肢预处理运动状态对肢体可变固定器和可变阻尼轴进行预控制。接下来可以执行步骤s139实时获取下肢运动过程中的坐标变化值。接下来可以执行步骤s1310根据坐标变化值,检索坐标变化受力映射,获取下肢的运动状态,标记为下肢精确处理运动状态。步骤s1311逻辑处理模块根据下肢精确处理运动状态对肢体可变固定器和可变阻尼轴进行精确控制。上述方案中首先检测下肢转动角度并获取下肢预处理运动状态,由于下肢转动角度并不能准确反映出下肢的运动状态,因此其检测结果可能会不准确,但是速度快,可以利用其特性产生的下肢预处理运动状态对肢体可变固定器和可变阻尼轴进行预控制。由于下肢运动依赖肌肉的收缩和舒张,因此本方案可以实时获取下肢运动过程中的坐标变化值,并据此获取下肢精确处理运动状态,再通过下肢精确处理运动状态对肢体可变固定器和可变阻尼轴进行精确控制。通过先后两次控制兼顾了控制的速度和准确性。
32.请参阅图8所示,控制器还可以执行以下步骤用以实现对肢体可变固定器和可变阻尼轴的控制。控制器还包括头部电极贴片,头部电极贴片用于检测脑部生物电,并且执行以下步骤。首先可以执行步骤s141在下肢训练过程中,实时获取头部生物电波形。接下来可以执行步骤s142当用户察觉疼痛,则将对应的头部生物电波形标记为疼痛波形。接下来可以执行步骤s143获取用户疼痛波形所对应的下肢转动角度和坐标变化值,分别标记为下肢疼痛转动角度和疼痛坐标变化值。步骤s144当检测下肢转动角度邻近下肢疼痛转动角度,和/或坐标变化值邻近疼痛坐标变化值,则提醒用户。利用脑电波的特性寻找标记疼痛波形,最终实现对用户的提醒,避免下肢训练过程中的二次损伤。
33.请参阅图9所示,控制器还可以执行以下步骤。在以上步骤s144的基础上,进一步执行步骤s145当用户察觉疼痛,将疼痛程度进行轻重分级。接下来可以执行步骤s146将疼痛波形按照轻重程度进行标记。最后执行步骤s147根据疼痛波形和对应的疼痛程度标记结果获取下肢疼痛转动角度和/或疼痛坐标变化值的邻近值。利用疼痛波形的特性实现对用户的提醒,避免下肢训练过程中的二次损伤。
34.请参阅图10所示,步骤s147根据疼痛波形和对应的疼痛程度标记结果获取下肢疼痛转动角度和/或疼痛坐标变化值的邻近值的步骤,可以执行以下步骤。首先执行步骤s1471将疼痛程度设定为正值,疼痛程度和轻重与数值正相关。接下来可以执行步骤s1472将疼痛程度作为输入值,疼痛波形作为输出值,对预测模型进行训练,得到疼痛预测模型。接下来可以执行步骤s1473将设定的负值输入疼痛预测模型,得到邻近疼痛波形。步骤s1474根据邻近疼痛波形得到下肢疼痛转动角度和/或疼痛坐标变化值的邻近值。通过构建的疼痛预测模型实现对下肢疼痛转动角度和/或疼痛坐标变化值的邻近值的寻找,最终实现对下肢关节的保护,避免康复过程中的二次损伤。
35.本发明所示实施例的上述描述(包括在说明书摘要中所述的内容)并非意在详尽列举或将本发明限制到本文所公开的精确形式。尽管在本文仅为说明的目的而描述了本发明的具体实施例和本发明的实例,但是正如本领域技术人员将认识和理解的,各种等效修改是可以在本发明的精神和范围内的。如所指出的,可以按照本发明所述实施例的上述描
述来对本发明进行这些修改,并且这些修改将在本发明的精神和范围内。
36.本文已经在总体上将系统和方法描述为有助于理解本发明的细节。此外,已经给出了各种具体细节以提供本发明实施例的总体理解。然而,相关领域的技术人员将会认识到,本发明的实施例可以在没有一个或多个具体细节的情况下进行实践,或者利用其它装置、系统、配件、方法、组件、材料、部分等进行实践。在其它情况下,并未特别示出或详细描述公知结构、材料和/或操作以避免对本发明实施例的各方面造成混淆因而,尽管本发明在本文已参照其具体实施例进行描述,但是修改自由、各种改变和替换意在上述公开内,并且应当理解,在某些情况下,在未背离所提出发明的范围和精神的前提下,在没有对应使用其他特征的情况下将采用本发明的一些特征。因此,可以进行许多修改,以使特定环境或材料适应本发明的实质范围和精神。本发明并非意在限制到在下面权利要求书中使用的特定术语和/或作为设想用以执行本发明的最佳方式公开的具体实施例,但是本发明将包括落入所附权利要求书范围内的任何和所有实施例及等同物。因而,本发明的范围将只由所附的权利要求书进行确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。