1.本发明涉及穿刺设备技术领域,尤其涉及一种经会阴前列腺穿刺系统的自动导向器。
背景技术:
2.前列腺穿刺是利用超声检测图像的引导,使用穿刺针从前列腺获取前列腺组织进行病例检查,是目前用来诊断前列腺癌的基本检查方法。在经会阴前列腺穿刺手术中,需要利用穿刺针导向器对穿刺针的穿刺位置进行引导确定,目前导向器主要包括单孔型穿刺导向器、线型穿刺导向器和面型穿刺导向器。其中,单孔型穿刺导向器是根据超声检测图像由医生人工确定导向器位置,直接进行穿刺,其穿刺位置很难控制且误差较大;线型穿刺导向器则在导向器上设置排成一列的多个穿刺孔位,相对于单孔型导向器较容易确定穿刺位置,但由于穿刺孔位呈线型排列,且穿刺孔位之前有间隔,其穿刺准确度仍较低;面型穿刺导向器则在线型穿刺导向器的基础上,增加至多行多列的多个穿刺孔位,可以增加穿刺可调整的范围,但由于穿刺孔位之间的间隔,仍难以保证穿刺的准确度。以上三种穿刺导向器均无法快速准确地对穿刺孔位进行确定,且穿刺精度较低,导致使用者在手术中需要耗费大量时间和精力寻找对应的穿刺位,且容易造成人为错误,导致预期穿刺孔位与实际穿刺孔位不一致,导致组织采样不准确。
技术实现要素:
3.本发明的目的在于公开一种经会阴前列腺穿刺系统的自动导向器,具体在于提供一种可自由精准确定穿刺孔位置的自动导向器。
4.为达到上述目的,本发明采用如下技术方案:一种经会阴前列腺穿刺系统的自动导向器,包括横向驱动杆和纵向驱动杆,所述横向驱动杆和纵向驱动杆交叉设置,横向驱动杆和纵向驱动杆的交叉处设置有可沿横向驱动杆和纵向驱动杆滑动的穿刺导向滑块;所述横向驱动杆由横向驱动机构驱动连接,纵向驱动杆由纵向驱动机构驱动连接;还包括有导向器控制装置,所述导向器控制装置与横向驱动机构和纵向驱动机构驱动连接。
5.具体的,横向驱动机构包括设置于横向驱动杆两端的两组横向驱动电机、横向滑轨和横向驱动块,纵向驱动机构包括设置于纵向驱动杆两端的两组纵向驱动电机、纵向滑轨和纵向驱动块。
6.进一步的,横向驱动杆两端的横向滑轨的首尾端位置均设置有位置传感器,横向驱动杆两端的横向滑轨上的两个传感器分别相对设置;纵向驱动杆两端的纵向滑轨的首尾端位置同样设置有位置传感器,纵向驱动杆两端的纵向滑轨上的两个传感器分别相对设置。
7.具体的,导向器控制装置包括显示器和控制器,所述控制器与横向驱动机构和纵向驱动机构控制连接,显示器与控制器连接。
8.具体的,导向器控制装置内设置有超声图像处理模块,控制器通过超声图像处理
模块与超声检测探头连接。
9.在另一种方案中,导向器控制装置设置于超声检测系统内,控制器与超声检测系统的控制主机连接。
10.具体的,穿刺导向滑块上设置有不同孔径规格且可拆卸更换的穿刺孔部件。
11.本发明的优点在于:通过对横向驱动杆和纵向驱动杆的驱动,可以对穿刺导向滑块进行规划式定位,实现任意位置的经会阴前列腺穿刺,同时将导向器控制装置与超声检测连接一起,通过超声探头与导向器位置的对应,可以直接在超声检测图像上选定穿刺位置以控制穿刺导向滑块移动至指定位置,大大提高穿刺孔位确定的速度和准确性。
附图说明
12.附图1为实施例1或实施例2中导向器的整体结构示意图;附图2为实施例1或实施例2中导向器的俯视结构示意图;附图3为实施例1中导向器控制装置的连接原理图;附图4为实施例2中导向器控制装置的连接原理图。
具体实施方式
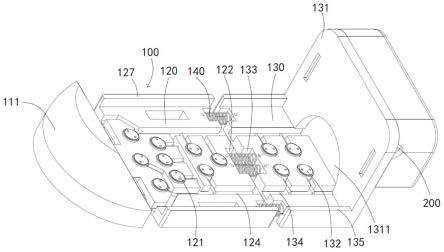
13.实施例1,参照图1-3,一种经会阴前列腺穿刺系统的自动导向器,包括横向驱动杆1和纵向驱动杆2,所述横向驱动杆1和纵向驱动杆2交叉设置,横向驱动杆1和纵向驱动杆2的交叉处设置有可沿横向驱动杆1和纵向驱动杆2滑动的穿刺导向滑块3;所述横向驱动杆1由横向驱动机构4驱动连接,纵向驱动杆2由纵向驱动机构驱动5连接;还包括有导向器控制装置6,所述导向器控制装置6与横向驱动机构4和纵向驱动机构5驱动连接。
14.在本实施例中,横向驱动机构4和纵向驱动机构5分别对横向驱动杆1和纵向驱动杆2进行驱动移动,从而对设置于横向驱动杆1和纵向驱动杆2交叉处的穿刺导向滑块3在横向驱动杆1和纵向驱动杆2纵横移动的范围内进行任意位置的驱动移动,导向器控制装置6与横向驱动机构4和纵向驱动机构5连接,实现对横向驱动机构4和纵向驱动机构5的控制,操作人员可以通过导向器控制装置6快速将穿刺导向滑块3驱动移动至指定的穿刺位置,从而实现穿刺孔位的快速确定,且能有效提高穿刺孔位的准确度。其中,穿刺导向滑块3用于对穿刺针进行导向,其中设置有穿刺孔可容穿刺针穿过,同时,横向驱动杆1和纵向驱动杆2的中部均设置有贯通的槽状结构,可容穿刺针从其中经过进行穿刺。另外,穿刺导向滑块3上设置有不同孔径规格且可拆卸更换的穿刺孔部件31,当需要更换不同规格的穿刺针时,可以通过拆卸更换穿刺孔部件31以适应不同规格的穿刺针。
15.其中,导向器控制装置6包括显示器61和控制器62,控制器62与横向驱动机构4和纵向驱动机构5控制连接,显示器61与控制器62连接;显示器61可与用于显示穿刺导向滑块3可移动的范围,并通过在显示器61上选定穿刺位置,由控制器62控制横向驱动机构4和纵向驱动机构5驱动穿刺导向滑块3移动至选定的穿刺位置,从而可以快速调节穿刺导向滑块3位置,大大缩短穿刺手术的时间。
16.在进一步的实施例中,导向器控制装置6内设置还有超声图像处理模块63,控制器62通过超声图像处理模块63与超声检测探头连接;通过在导向器控制装置6内设置超声图像处理模块63,可以将超声检测探头检测获得的超声图像在显示器61上显示出来,通过将
超声检测探头和导向器的位置进行对应匹配,可以在显示器将超声图像和穿刺导向滑块3的移动范围进行重叠,从而可以在超声图像选定穿刺位置,大大方便医生在手术过程中快速准确地将穿刺导向滑块移动至穿刺位置,且能减少认为失误。
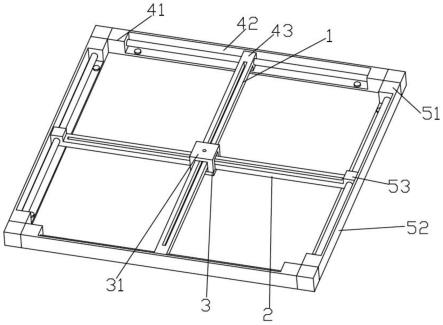
17.具体的,上述横向驱动机构4包括设置于横向驱动杆1两端的两组横向驱动电机41、横向滑轨42和横向驱动块43,纵向驱动机构5包括设置于纵向驱动杆2两端的两组纵向驱动电机51、纵向滑轨52和纵向驱动块53。横向驱动机构4和纵向驱动机构5均为两组并分别设置于横向驱动杆1和纵向驱动杆2的两端,从而组成一个驱动边框,横向驱动电机41通过驱动横向驱动块43在横向滑轨42上移动,从而实现对横向驱动杆1的驱动移动,同理,纵向驱动电机51通过驱动纵向驱动块53在纵向滑轨52上移动,从而实现对纵向驱动杆2的驱动移动。另外,横向驱动机构4和纵向驱动机构5的横向驱动电机41和纵向驱动电机51优选采用伺服电机,便于导向器控制装置6对横向驱动电机41和纵向驱动电机51进行准确驱动,从而提高对横向驱动杆1和纵向驱动杆2驱动的精确度。横向驱动机构4和纵向驱动机构5上均设置有对应的伺服电机控制器,可与导向器控制装置6连接实现对横向驱动机构4和纵向驱动机构5的驱动。
18.在进一步的实施例中,横向驱动杆1两端的横向滑轨42的首尾端位置均设置有位置传感器7,横向驱动杆1两端的横向滑轨42上的两个传感器分别相对设置;纵向驱动杆2两端的纵向滑轨52的首尾端位置同样设置有位置传感器7,纵向驱动杆2两端的纵向滑轨52上的两个传感器分别相对设置。通过在横向滑轨42和纵向滑轨52上设置位置传感器7,位置传感器7通过对横向驱动块43和纵向驱动块53的检测,可以实现对横向驱动杆1和纵向驱动杆2的位置进行检测,便于对横向驱动杆1和纵向驱动杆2的位置进行准确地控制,例如,在开始手术时,可以通过驱动横向驱动杆1向左移动至触发最左端的位置传感器7,并同时驱动纵向驱动杆2向下移动至触发最下端的位置传感器7,从而确定穿刺导向滑块3位于左下角的位置,并可以以该位置最为初始状态点,通过控制横向驱动电机41转动的圈数来控制横向驱动杆1移动的距离,通过控制纵向驱动电机51转动的圈数来控制纵向驱动杆2移动的距离,以此实现对穿刺导向滑块3的准确驱动定位。通过在横向滑轨42和纵向滑轨52的两端均设置位置传感器7,还可以快速确定穿刺导向滑块移动的范围。
19.实施例2,参照图4,本实施例与实施例1的区别在于导向器控制装置6的设置,本实施例中,导向器控制装置6设置于超声检测系统内,控制器62与超声检测系统的控制主机连接,可以将导向器控制装置6内置于已有的超声检测系统内,只需在超声检测系统内安装对应的控制软件,即可将导向器与超声检测结合起来,实现穿刺位置的快速准确定位,显示器61则可以采用超声检测系统自带的显示屏。
20.当然,以上仅为本发明较佳实施方式,并非以此限定本发明的使用范围,故,凡是在本发明原理上做等效改变均应包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。