技术特征:
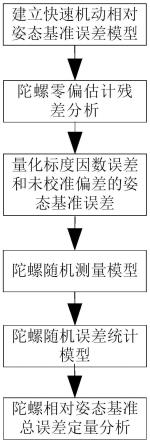
1.一种卫星相对姿态基准误差分析方法,其特征在于,包括如下步骤:步骤s1:根据任务的不同需求,建立适用快速机动的陀螺相对姿态基准误差模型;步骤s2:在机动任务前联合光学敏感器进行陀螺零偏估计,分析对姿态基准精度影响;步骤s3:针对陀螺标度因数误差和未校准偏差引起的姿态基准误差进行量化分析;步骤s4:针对姿态基准误差进行量化分析之后建立陀螺随机测量模型;步骤s5:利用陀螺随机测量模型进行姿态估计,通过陀螺状态估计方程建立陀螺随机误差统计模型;步骤s6:在快速机动过程中,利用陀螺随机误差统计模型对陀螺姿态角基准总误差进行定量分析。2.根据权利要求1所述的卫星相对姿态基准误差分析方法,其特征在于,所述步骤s1在进行大角速率或大角度机动任务时,建立的适用快速机动的陀螺相对姿态基准误差模型为:其中,k
g
是陀螺标度因数误差,k
ma
是陀螺未对准误差,ω是真实角速率;b是陀螺漂移矢量,包括常值偏移和随机漂移,b中随机漂移部分,单位是
°
/h,由角速率随机游走驱动产生;n
v
是陀螺角速率测量白噪声值;ω
g
是陀螺测量值;是陀螺漂移导数;n
u
是随机游动的长期漂移速率偏差。3.根据权利要求1所述的卫星相对姿态基准误差分析方法,其特征在于,所述步骤s2中在进行大角度姿态机动前,陀螺和光学敏感器联合使用,对陀螺零偏进行估计修正,陀螺零偏的估计残差随时间累计的姿态误差变小。4.根据权利要求1所述的卫星相对姿态基准误差分析方法,其特征在于,所述步骤s3中标度因数误差k
g
和未对准误差k
ma
与机动过程中的三轴姿态角速度ω
x
、ω
y
、ω
z
有关,表示为:为:其中:k
gx
是x轴陀螺标度因数误差;k
gy
是y轴陀螺标度因数误差;k
gz
是z轴陀螺标度因数误差;g
sfx
是x轴陀螺标度因数误差系数;g
sfy
是y轴陀螺标度因数误差系数;g
sfz
是z轴陀螺标度因数误差系数;k
max
是x轴陀螺未对准误差;k
may
是y轴陀螺未对准误差;k
maz
是z轴陀螺未对准误差;g
xy
是x轴陀螺与y轴陀螺关联的未对准误差系数;g
xz
是x轴陀螺与z轴陀螺关联的未对准误差系数;g
yx
是y轴陀螺与x轴陀螺关联的未对准误差系数;g
yz
是y轴陀螺与z轴陀螺关联的未对准误差系数;g
zx
是z轴陀螺与x轴陀螺关联的未对准误差系数;g
zy
是z轴陀螺与y轴陀螺关联的未对准误差系数。5.根据权利要求4所述的卫星相对姿态基准误差分析方法,其特征在于,所述步骤s3中
根据三轴姿态角速度ω
x
、ω
y
、ω
z
信息,解算出标度因数误差和未对准误差在机动时间内引起的姿态基准偏差为:其中:t
s
为机动时间;α
sfmax
、分别是x轴、y轴和z轴陀螺的标度因数误差和未对准误差引起的姿态基准偏差值。6.根据权利要求1所述的卫星相对姿态基准误差分析方法,其特征在于,所述步骤s4中采用卡尔曼滤波器建立稳态下的陀螺随机测量模型:其中,i代表x、y、z三轴方向,为卫星本体系相对于惯性系的角速度;n
vi
为陀螺的测量噪声,假设为零均值白噪声,满足:这里的δ
i
(t)为狄拉克函数,满足并且并且是陀螺漂移矢量;是随机游动的长期漂移速率偏差,具有标准差σ
ui
的积分白噪声过程;n
ui
均值为0,其方差满足:σ
v
为陀螺的角度随机游走系数;σ
u
为陀螺的速率随机游走系数,两者由陀螺产品自身特性所有。7.根据权利要求1所述的卫星相对姿态基准误差分析方法,其特征在于,所述步骤s5中利用陀螺随机测量模型进行姿态估计时,由于和为均值为零的小量,估计值为:其中,分别为姿态角和陀螺漂移的估计值;是陀螺漂移的估计值的导数;是陀螺测量输出值。选取新的状态组合成系统方程为:方程中状态噪声的协方差矩阵q为:其中,t为积分时间;因此,陀螺随机误差统计模型δθ(3σ)表示为:
式中:δθ
x
为x轴姿态误差,δθ
y
为y轴姿态误差,δθ
z
为z轴姿态误差,t为积分时间,σ
vx
、σ
vy
、σ
vz
分别为x轴陀螺、y轴陀螺、z轴陀螺的角度随机游走系数;σ
ux
、σ
uy
、σ
uz
分别为x轴陀螺、y轴陀螺、z轴陀螺的速率随机游走系数。8.根据权利要求1所述的卫星相对姿态基准误差分析方法,其特征在于,所述步骤s6中的快速机动过程中,陀螺作为姿态基准的总误差δδ包括与机动角速度大小相关的标度因数误差和未对准偏差引起的动态偏差δα,以及陀螺随机漂移和噪声共同在机动时间的积分误差角δθ两部分组成,根据误差合成理论有:式中:δθ
x
、δθ
y
、δθ
z
分别为x轴、y轴和z轴陀螺随机误差引起的姿态误差;α
sfmax
、分别是x轴、y轴和z轴陀螺的标度因数误差和未对准误差引起的姿态基准偏差值;δδ
x
、δδ
y
、δδ
z
分别是是x轴、y轴和z轴姿态总误差。9.一种卫星相对姿态基准误差分析系统,其特征在于,使用权利要求1至8中任一项所述的卫星相对姿态基准误差分析方法进行误差分析,包括:模块m1:根据任务的不同需求,建立适用快速机动的陀螺相对姿态基准误差模型;模块m2:在机动任务前联合光学敏感器进行陀螺零偏估计,分析对姿态基准精度影响;模块m3:针对陀螺标度因数误差和未校准偏差引起的姿态基准误差进行量化分析;模块m4:针对姿态基准误差进行量化分析之后建立陀螺随机测量模型;模块m5:利用陀螺随机测量模型进行姿态估计,通过陀螺状态估计方程建立陀螺随机误差统计模型;模块m6:在快速机动过程中,利用陀螺随机误差统计模型对陀螺姿态角基准总误差进行定量分析。10.一种卫星相对姿态基准误差分析装置,其特征在于,包括权利要求9所述的卫星相对姿态基准误差分析系统。
技术总结
本发明提供了一种卫星相对姿态基准误差分析方法,包括步骤S1:根据任务的不同需求,建立适用快速机动的陀螺相对姿态基准误差模型;步骤S2:在机动任务前联合光学敏感器进行陀螺零偏估计,分析对姿态基准精度影响;步骤S3:针对陀螺标度因数误差和未校准偏差引起的姿态基准误差进行量化分析;步骤S4:针对姿态基准误差进行量化分析之后建立陀螺随机测量模型;步骤S5:利用陀螺随机测量模型进行姿态估计,通过陀螺状态估计方程建立陀螺随机误差统计模型;步骤S6:在快速机动过程中,利用陀螺随机误差统计模型对陀螺姿态角基准总误差进行定量分析。本发明解决了对随机误差影响姿态基准误差进行量化分析的问题,可以应用于各种航天器快速机动过程中。器快速机动过程中。器快速机动过程中。
技术研发人员:边志强 顾强 孙星 栗双岭 洪振强 步士超 徐凯 张健 茹海忠 刘培玲
受保护的技术使用者:上海卫星工程研究所
技术研发日:2022.01.24
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。