1.本发明属于海洋潮汐测量技术领域,尤其涉及一种极地冰区海洋潮汐测量浮标、测量方法及应用。
背景技术:
2.潮汐通常是一种由地球运动和日月关系等因素引起的海洋水位涨落过程,目前在正常的水面可以使用浮子式验潮仪、压力计、声学验潮仪等设备进行潮汐的观测,但是极地区域由于冰的存在,目前的测量设备往往无法在极地冰区进行观测。潮汐是重要的海洋水文参数之一,对于海洋科学研究、军事保障以及防灾减灾有重要价值。
3.现有技术一公开了一种冰下湖体积变化的估算方法,申请号:cn201811093102.7,通过获取相应时间段内的cryosat2雷达高度计sarin模式的l1b波形数据;使用波形重跟踪方法计算冰下湖区域的表面高程,对获取的表面高程数据进行预处理,剔除高程变化异常点;使用dem对预处理后的高程数据进行坡度改正,去除坡度造成的误差;使用克里金插值最终生成100*100m的格网,然后计算相应时间段内的高程变化,对高程变化值加入后向散射能量改正,去除后向散射能量对高程变化造成的影响;通过高程变化值获取冰下湖的形状和面积,对每个格网冰下湖表面的高程变化值进行积分,最终获取相应时间段内冰下湖的体积变化。
4.现有技术二公开了一种基于北斗和激光的简易潮位观测站及其验潮方法,申请号:cn201811620175.7,所述简易潮位观测站由验潮端和控制接收端组成;所述验潮端为,在连接板上设有激光测距模块经串口线分别与北斗定位及短报文通讯模块、数据存储备份模块连接;gnss天线经天线连接线与北斗定位及短报文通讯模块相连接;设有滤波孔的验潮管与连接板相连接,两节验潮管之间设有连接管;浮球设于验潮管中,激光测距模块的激光束照射至浮球上并反射;过滤帽设于验潮管的底端;所述验潮站控制接收端为,北斗短报文通讯模块经串口线与装有潮位测量控制分析计算软件系统的计算机相连接,gnss天线经天线连接线与北斗短报文通讯模块相连接。
5.现有技术均没有针对北极海冰覆盖区域进行有效的潮汐测量,现有海洋潮汐测量技术主要适用于沿岸验潮站或者无冰水域。由于海冰的存在,特别是远离陆地区域的海冰覆盖区域,常规验潮的方法如声学验潮仪、浮子式验潮仪和海底压力计往往无法正常实施潮汐观测。传统的gnss浮标也可以观测潮位,但冰基的gnss浮标往往对海冰厚度改变带来的误差进行补偿,从而造成显著的误差。
6.通过上述分析,现有技术存在的问题及缺陷为:浮子式验潮仪只能用于沿岸的验潮井,无法用于外海,声学验潮仪只能适用于码头等陆地位置,需要安装支撑架设备,无法用于外海,压力计在深海布放往往侧脸误差较大,且成本高,无法改正海冰的误差影响。
7.解决以上问题及缺陷的意义为:本发明提出一种综合利用北斗定位和冰雷达进行极地离岸冰区的冰基潮位测量方法,通过在浮标体设置北斗定位系统和冰雷达系统,可以分别观测到浮标的地心绝对坐标和冰厚度等参数,通过数据处理可提取得到海洋潮汐信
号,可以解决极地离岸冰区的潮汐测量技术难题。
技术实现要素:
8.为克服相关技术中存在的问题,本发明公开实施例提供了一种极地冰区海洋潮汐测量浮标。所述技术方案如下:该极地冰区海洋潮汐测量浮标包括浮标本体;北斗导航定位系统,安装在所述浮标本体上,用于确定浮标体本体在冰面的地心三维坐标;探冰雷达,安装在所述浮标本体上,用于测量天线到冰面的距离以及海冰厚度。
9.在一个实施例中,所述北斗导航定位系统包括:北极卫星导航定位信号接收机和gnss天线,所述gnss天线安装在北极卫星导航定位信号接收机上,用于接收l频段三个频点的1559.052mhz—1591.788mhz的b1信号,1166.22mhz—1217.37mhz的b2信号以及1250.618mhz—1286.423mhzb3信号。
10.在一个实施例中,所述探冰雷达使用多频段雷达,通过多频测量结果实现海冰厚度的交叉检验和去噪。
11.在一个实施例中,所述探冰雷达的判断采用1530hz、5310hz、18330hz、63030hz、93090hz中的一种,其中,采样频率为10hz。
12.本发明的另一目的在于提供一种所述极地冰区海洋潮汐测量浮标的极地冰区海洋潮汐测量方法,该极地冰区海洋潮汐测量方法为:利用北斗卫星导航定位确定浮标在地心坐标系下的三维坐标,利用探冰雷达测量浮标下方的海冰厚度,通过测定gnss天线、探冰雷达和浮标结构的高度关系,推出浮标下方的水位变化信息,即有效的潮汐信息。
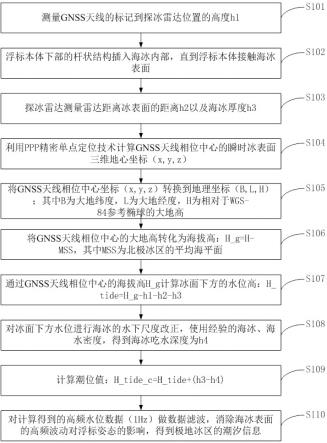
13.在一个实施例中,该方法具体包括以下步骤:步骤一、测量gnss天线的标记到探冰雷达位置的高度h1;步骤二、浮标本体下部的杆状结构插入海冰内部,直到浮标本体接触海冰表面;步骤三、探冰雷达测量雷达距离冰表面的距离h2以及海冰厚度h3;步骤四、利用ppp精密单点定位技术计算gnss天线相位中心的瞬时冰表面三维地心坐标(x,y,z);步骤五、将gnss天线相位中心坐标(x,y,z)转换到地理坐标(b,l,h);其中b为大地纬度,l为大地经度,h为相对于wgs-84参考椭球的大地高;步骤六、将gnss天线相位中心的大地高转化为海拔高:h_g=h-mss,其中mss为北极冰区的平均海平面;步骤七、通过gnss天线相位中心的海拔高h_g计算冰面下方的水位高:h_tide=h_g-h1-h2-h3;步骤八、对冰面下方水位进行海冰的水下尺度改正,使用经验的海冰、海水密度,得到海冰吃水深度h4;步骤九、计算潮位值:h_tide_c=h_tide (h3-h4);步骤十、对计算得到的1hz高频水位数据做数据滤波,消除海冰表面的高频波动对浮标姿态的影响,得到极地冰区的潮汐信息。
14.在一个实施例中,在步骤四中,瞬时冰表面三维地心坐标(x,y,z)计算过程中,利
用北斗载波相位观测值和精密轨道、钟产品以及严密的精密单点定位算法(ppp),实现irtf框架下的绝对位置计算,其绝对精度为cm级别,ppp采用的观测值为:。
15.在一个实施例中,在步骤八中,海冰吃水深度h4在秋季的计算方法为:,其中c为海冰总体密集度,cm为多年冰比例,cf为一年冰比例,s为积雪厚度。
16.在一个实施例中,在步骤八中,海冰吃水深度h4在冬季的计算方法为:,其中c为海冰总体密集度,cm为多年冰比例,cf为一年冰比例,s为积雪厚度。
17.本发明的另一目的在于提供一种所述极地冰区海洋潮汐测量浮标在极地海洋潮汐测量中的应用。
18.结合上述的所有技术方案,本发明所具备的优点及积极效果为:由于海冰的原因,北极冰区的潮汐现场测量技术尚未较好的实现。首先,远海区域无法使用岸基的验潮站,因此常规的声学和浮子式测量方法无法应用,其次,由于海冰的存在,海底压力计会收到海冰的干扰,且数据无法顺利回传。对上述难题。本发明提出一种适用于北极冰区的冰面潮汐测量方法,该方法使用了全球导航定位系统,利用冰面的gnss接受机可以精确测量冰表面的三维地心坐标及其时间变化。考虑到海冰的季节性变化,本发明提出同步雷达测量冰厚的方案,为gnss数据提供冰厚改正,最终可得到海水面的潮汐信号。本发明可为北极海洋科学研究和船舶航行提供潮汐资料支撑。本发明可以适用于极地冰区潮汐测量,可以改正海冰带来的观测误差,设备成本也显著降低。
19.当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明的公开。
附图说明
20.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
21.图1是本发明实施例提供的极地冰区海洋潮汐测量浮标的结构示意图。
22.图2是本发明实施例提供的极地冰区海洋潮汐测量方法流程图。
23.图3是本发明实施例提供的探冰雷达观测的冰厚图。
24.图中:1、gnss天线;2、探冰雷达;3、浮标本体;4、冰表面;5、水面;6、大地水准面;7、参考椭球面。
具体实施方式
25.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发
h1-h2-h3;s108、对冰面下方水位进行海冰的水下尺度改正,使用经验的海冰、海水密度,得到海冰吃水深度为h4;s109、计算潮位值:h_tide_c=h_tide (h3-h4);s110、对计算得到的高频水位数据(1hz)做数据滤波,消除海冰表面的高频波动对浮标姿态的影响,得到极地冰区的潮汐信息。
39.模拟数据如图3所示,结果表明海冰厚度的变化对于潮汐测量有显著的影响,必须加以改正,在利用探冰雷达测量的海冰厚度改正gnss数据后,潮汐数据可以和真实数据较好的匹配。
40.本领域技术人员在考虑说明书及实践这里公开的公开后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由所附的权利要求指出。
41.应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围应由所附的权利要求来限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。