1.本发明涉及建筑施工领域,尤其涉及一种建筑工地线缆铺设机器人。
背景技术:
2.现在建筑需要铺设大量的电力线缆以及通信线缆,对于铺设在地面上的线缆可以由工人拖拽的方式铺设,但是现在许多建筑的线缆都是悬空铺设的(比如楼宇的地下室),悬空铺设电缆的方法为在天花板的下方架设支撑板,而后再通过将线缆放置的支撑板,这种通过人工在支撑板上设置电缆的方式十分不便。
技术实现要素:
3.本发明针对上述问题,提出了一种建筑工地线缆铺设机器人。
4.本发明采取的技术方案如下:
5.一种建筑工地线缆铺设机器人,包括车架、四个车轮、四台驱动电机,所述车轮转动安装于车架上,所述驱动电机安装于车架上,所述车轮与驱动电机通过传送皮带配合在一起,所述车架上开设有固定夹口。
6.本种机器人中,在车架上设置了固定夹口,线缆的一端可以固定在固定夹口上,这样在悬空设置的支撑板上,车架在支撑板上前进时可以拖拽着线缆在支撑板上前进,从而实现了线缆在支撑板上的铺设,同时由于在车架上安装了四个车轮,且四个车轮各自由一个电机来进行驱动,所以对于有坡度或者折弯的支撑板,本种车架均能稳定地运动过去。
7.综上所述,本种机器人可以在悬空架设的板材上铺设机器人,操作方便。
8.可选的,还包括刮磨板,所述刮磨板固定在车架上,所述刮板板上设置有圆弧状的刃口。
9.具体刮磨板的长度小于两个车轮之间的距离,刮磨板位于两个车轮之间,刮磨板的作用是在车架行进的过程中打磨掉支撑板上的尖锥毛刺或者其他尖锐物(因为有些建筑工地在铺设线缆时会直接采用槽钢作为支撑板,而槽钢的表面存在较多的尖锐毛刺,这些尖锐毛刺不处理,导致线缆在与这些尖锐毛刺接触时,不会被这些尖锐毛刺刺碎),避免这些尖锐物损伤线缆。
10.具体刮磨板在刮磨支撑板上的毛刺时,刮磨板相对于支撑板处于倾斜的状态。
11.可选的,所述刮磨板上设置有侧挡板,所述侧挡板不少于2片,且侧挡板之间处于平行的状态。
12.因为被刮磨板刮除的尖锥毛刺会残留在刮磨板上,为了避免刮磨板上的尖锥毛刺掉落,所以在刮磨板上设置侧挡板,利用侧挡板对刮磨板上的尖锥毛刺物起到阻碍作用,避免尖锥毛刺物从新掉落到支撑板上,具体侧挡板平行于车架的前进方向。
13.可选的,还包括夹持片以及转辊,所述夹持片固定于车轮上,且每个车轮上固定有两片夹持片,每个车轮上的两片夹持片处于平行状态,所述转辊的两端分别与两个夹持片转动配合在一起,所述转辊与轮子的轮面接触。
14.具体每个车轮上的两个转辊不接触,相邻的两个转辊之间存在间隙,这样车架在行驶时,当遇到障碍物时,转辊可以发生转动,这样可以使得整个车轮顺利地跨越障碍物,相对于轮子轮面直接接触支撑板,利用转辊来接触支撑板,可以使得整个车架在跨越障碍物时所发生的振颤更小。
15.可选的,所述转辊为橄榄球状的转辊。
16.可选的,所述转辊的中轴线与轮子的中轴线不平行。
17.采用橄榄球状的状辊,转辊的中轴线相对于轮子的中轴线处于相对倾斜的状态,这样的设计可以保证当转辊遇到质量相对较轻的障碍物时,可以直接将障碍物挤向转辊的一侧,确保障碍物不会引起车轮上下波动,从而避免引起车架发生振颤。
18.可选的,所述转辊包括金属转辊以及橡胶转辊,每个轮子上均设置有金属转辊及橡胶转辊,且金属准辊与橡胶转辊间隔交替排列。
19.具体金属转辊是铁质的转辊,而橡胶转辊也不完全是由橡胶制成,橡胶转辊的大部分结构都是金属支撑,只是在辊面上套设了一层橡胶,利用橡胶与支撑板接触,而金属转辊是金属辊面直接与支撑板接触,采用金属转辊与橡胶转辊组合在一起使用,金属转辊用于保证车轮与支撑板之间的强度,而橡胶转辊用于增加车轮与支撑板之间的摩擦力,所以采用金属转辊与橡胶转辊协同使用,可以在保证车轮(橡胶转辊会发生挤压形变而金属准辊不会发生挤压形变)与支撑板的距离基本不发生变化的情况下,车轮与支撑板之间依然具有良好的摩擦力,可以确保车轮具有良好的抓地性能。
20.可选的,还包括齿盘,所述驱动电机以及车轮上均安装有齿盘,所述传送皮带与所述齿盘配合在一起。
21.可选的,还包括空心钢管,所述空心钢管不少于两个,空心钢管平行排列设置在车架上,所述驱动电机位于两根平行的空心钢管之间,所述固定夹口设置于空心钢管上。
22.具体为了减轻整个车架的重量,采用空心钢管,且为了保证钢管安装的稳定性,采用方形的空心钢管。
23.可选的,固定夹口为三角状的固定夹口,且固定夹口位于两个车轮之间。
24.固定夹口采用三角状的固定夹口,且固定夹口设置在空心钢管上,这样可以快速缠绕固定线缆。
25.本发明的有益效果是:可以在悬空架设的板材上铺设机器人,操作方便。
附图说明:
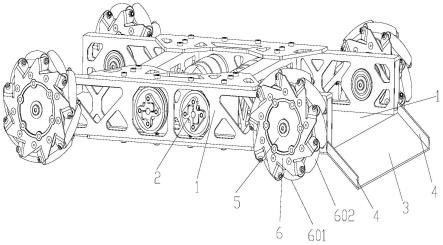
26.图1是建筑工地线缆铺设机器人示意简图,
27.图2是车轮与电机的配合关系示意图,
28.图3是车轮的结构示意简图。
29.图中各附图标记为:1、车架;2、电机;3、刮磨板;4、侧挡板;5、车轮;6、夹持片;601、金属转辊;602、橡胶转辊;7、空心钢管;701、固定夹口;8、皮带;9、齿片。
具体实施方式:
30.下面结合各附图,对本发明做详细描述。
31.如附图1、附图2以及附图3所示,一种建筑工地线缆铺设机器人,包括车架1、四个
车轮5、四台驱动电机2,车轮5转动安装于车架1上,驱动电机2安装于车架1上,车轮5与驱动电机2通过传送皮带8配合在一起,车架1上开设有固定夹口701。
32.本种机器人中,在车架1上设置了固定夹口701,线缆的一端可以固定在固定夹口701上,这样在悬空设置的支撑板上,车架1在支撑板上前进时可以拖拽着线缆在支撑板上前进,从而实现了线缆在支撑板上的铺设,同时由于在车架1上安装了四个车轮5,且四个车轮5各自由一个电机2来进行驱动,所以对于有坡度或者折弯的支撑板,本种车架1均能稳定地运动过去。
33.综上,本种机器人可以在悬空架设的板材上铺设机器人,操作方便。
34.如附图1、附图2以及附图3所示,还包括刮磨板3,刮磨板3固定在车架1上,刮板板上设置有圆弧状的刃口。
35.具体刮磨板3的长度小于两个车轮5之间的距离,刮磨板3位于两个车轮5之间,刮磨板3的作用是在车架1行进的过程中打磨掉支撑板上的尖锥毛刺或者其他尖锐物(因为有些建筑工地在铺设线缆时会直接采用槽钢作为支撑板,而槽钢的表面存在较多的尖锐毛刺,这些尖锐毛刺不处理,导致线缆在与这些尖锐毛刺接触时,不会被这些尖锐毛刺刺碎),避免这些尖锐物损伤线缆。
36.具体刮磨板3在刮磨支撑板上的毛刺时,刮磨板3相对于支撑板处于倾斜的状态。
37.如附图1、附图2以及附图3所示,刮磨板3上设置有侧挡板4,侧挡板4不少于2片,且侧挡板4之间处于平行的状态。
38.因为被刮磨板3刮除的尖锥毛刺会残留在刮磨板3上,为了避免刮磨板3上的尖锥毛刺掉落,所以在刮磨板3上设置侧挡板4,利用侧挡板4 对刮磨板3上的尖锥毛刺物起到阻碍作用,避免尖锥毛刺物从新掉落到支撑板上,具体侧挡板4平行于车架1的前进方向。
39.如附图1、附图2以及附图3所示,还包括夹持片6以及转辊,夹持片6固定于车轮5上,且每个车轮5上固定有两片夹持片6,每个车轮5 上的两片夹持片6处于平行状态,转辊的两端分别与两个夹持片6转动配合在一起,转辊与轮子的轮面接触。
40.具体每个车轮5上的两个转辊不接触,相邻的两个转辊之间存在间隙,这样车架1在行驶时,当遇到障碍物时,转辊可以发生转动,这样可以使得整个车轮5顺利地跨越障碍物,相对于轮子轮面直接接触支撑板,利用转辊来接触支撑板,可以使得整个车架1在跨越障碍物时所发生的振颤更小。
41.如附图1、附图2以及附图3所示,转辊为橄榄球状的转辊。
42.如附图1、附图2以及附图3所示,转辊的中轴线与轮子的中轴线不平行。
43.采用橄榄球状的状辊,转辊的中轴线相对于轮子的中轴线处于相对倾斜的状态,这样的设计可以保证当转辊遇到质量相对较轻的障碍物时,可以直接将障碍物挤向转辊的一侧,确保障碍物不会引起车轮5上下波动,从而避免引起车架1发生振颤。
44.如附图1、附图2以及附图3所示,转辊包括金属转辊601以及橡胶转辊602,每个轮子上均设置有金属转辊601及橡胶转辊602,且金属准辊与橡胶转辊602间隔交替排列。
45.具体金属转辊601是铁质的转辊,而橡胶转辊602也不完全是由橡胶制成,橡胶转辊602的大部分结构都是金属支撑,只是在辊面上套设了一层橡胶,利用橡胶与支撑板接触,而金属转辊601是金属辊面直接与支撑板接触,采用金属转辊601与橡胶转辊602组合在一起使用,金属转辊601 用于保证车轮5与支撑板之间的强度,而橡胶转辊602用于增加车
轮5与支撑板之间的摩擦力,所以采用金属转辊601与橡胶转辊602协同使用,可以在保证车轮5(橡胶转辊602会发生挤压形变而金属准辊不会发生挤压形变)与支撑板的距离基本不发生变化的情况下,车轮5与支撑板之间依然具有良好的摩擦力,可以确保车轮5具有良好的抓地性能。
46.如附图1、附图2以及附图3所示,还包括齿盘,驱动电机2以及车轮5上均安装有齿盘,传送皮带8与齿盘配合在一起。
47.如附图1、附图2以及附图3所示,还包括空心钢管7,空心钢管7 不少于两个,空心钢管7平行排列设置在车架1上,驱动电机2位于两根平行的空心钢管7之间,固定夹口701设置于空心钢管7上。
48.具体为了减轻整个车架1的重量,采用空心钢管7,且为了保证钢管安装的稳定性,采用方形的空心钢管7。
49.如附图1、附图2以及附图3所示,固定夹口701为三角状的固定夹口701,且固定夹口701位于两个车轮5之间。
50.固定夹口701采用三角状的固定夹口701,且固定夹口701设置在空心钢管7上,这样可以快速缠绕固定线缆。
51.具体本实施方式中可以通过外接电源线的方式实现对各台驱动电机供电,也可以在车架上安装电池以及控制器,电池与控制器相接,控制器与各台驱动电机相接,控制器用于协调控制各台驱动电机的工况,同时为了便于实现遥控,也可以在车架上安装摄像头,摄像头用于获取车架前进方向上的实时画面,摄像头与控制器相接,并且采用具有无限通信功能的控制器,这样便于通过遥控的方式来控制。
52.以上所述仅为本发明的优选实施例,并非因此即限制本发明的专利保护范围,凡是运用本发明说明书所作的等效变换,直接或间接运用在其他相关的技术领域,均同理包括在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
