1.本发明涉及放射性监测仪表动态校准技术领域,具体涉及一种通道式车辆放射性监测系统动态校准平台。
背景技术:
2.随着国家对核安全的重视,为防止核废物和含放射性物质流入我国和在国内随意流通,国家在重要核设施(如核电站、后处理厂)、边境口岸、港口、高速公路、铸造厂、炼钢厂、废料场、废渣填埋场和焚化厂等地方安装和配备大量通道式车辆放射性监测系统。同时为防止安装的通道式车辆放射性监测系统失准、失灵,保障监测结果的准确和量值的统一,需对新安装的通道式车辆放射性监测系统进行计量性能测试验收,对使用中的通道式车辆放射性监测系统做校准测试,其中整个动态校准平台是功能实现的关键,系统的先进与否,直接关系到通道式车辆放射性监测系统动态校准平台自动化水平的高低。
技术实现要素:
3.针对现有技术中的缺陷,本发明提供一种通道式车辆放射性监测系统动态校准平台。
4.一种通道式车辆放射性监测系统动态校准平台,包括主控制模组和副控制模组,所述主控制模组包括工控机,所述副控制模组包括单片机,所述工控机包括usb1接口、usb2接口、usb3接口、usb4接口和rs485接口,所述rs485接口电性连接所述单片机,所述单片机电性连接有驱动模块、遥控模块、供电模块、升降模块、显示模块、灯光控制模块和报警模块;其中,所述工控机内设有信号发布模块和主函数调用模块,所述usb1接口、所述usb2接口和所述usb3接口电性连接有传感模块,所述usb4接口电性连接有通信透传模块;所述驱动模块包括直流电机驱动单元和转向电机驱动单元,所述直流电机驱动单元包括直流伺服电机、直流伺服电机驱动器、左后轮编码器和右后轮编码器,所述直流伺服电机驱动器电性连接所述单片机,所述转向电机驱动单元包括转向电机、转向电机驱动器和左右位移传感器,所述转向电机驱动器电性连接所述单片机。整个通道式车辆放射性监测系统动态校准平台包括了机械设计和硬件系统设计,机械设计中包括了车架结构和升降平台,而在硬件系统中,动态校准的各个功能都在硬件系统的统一布局下实现,系统设计的策略也决定了整个通道式车辆放射性监测系统动态校准平台的功能特点及其可扩展性;其中,动态校准平台具备自动调速、自主循迹、自主避障、自动升降和无线通信等一系列功能,通过模块化设计,划分为主控制模组和副控制模组,分别安装在车架结构的不同位置,通过从上到下的系统性控制实现相关功能;其中,直流电机驱动单元包括直流伺服电机、直流伺服电机驱动器、左后轮编码器和右后轮编码器,从而控制车架结构的行进往返,转向电机驱动单元包括转向电机、转向电机驱动器和左右位移传感器,从而控制车架结构的转弯;进一步地,通过工控机usb1接口、usb2接口、usb3接口电性连接传感模块,实现相应信号采集,实现对动态检测平台的实时监测,还通过通信透传模块来方便动态校准平台的控制和操作;进一步地,
通过单片机电性连接有驱动模块、显示模块、报警模块、升降模块和灯光控制模块,实现对自动驱动、信息显示、自动报警、自动升降、灯光等的控制,进一步方便整个动态监测系统的作业。
5.优选地,传感模块包括电性连接usb1接口的激光雷达单元,所述激光雷达单元包括激光雷达本体和第一激光雷达转接板。激光雷达单元主要起坐标系建立与避障的作用。其中,利用激光雷达本体实时测量动态校准平台四周的障碍物,并利用第一激光雷达转接板返回距离值,形成点云,在通过点云模糊算法将离散的点云圈连成线与面,从而产生周围障碍物的外观轮廓值,最后将该障碍物外观轮廓值通过工控机的ros系统基层函数提交到路径规划节点进行路径规划决策,实现车辆避障;其中,坐标系建立原理为,在激光雷达本体启动时,即标定为坐标原点(x=0,y=0点),随着动态校准平台的移动,激光雷达本体会形成中心点位移轨迹,工控机ros系统的路径行驶节点会实时计算中心点轨迹与坐标原点在x和y方向上的相对距离,从而形成车辆行驶的坐标系。当校准平台正常行驶时,工控机会通过计算比较当前坐标与车辆初始坐标(原点位置x=0,y=0)在x和y方向上的直线距离值,完成坐标系建立及定位,触发位移修正。
6.优选地,传感模块包括电性连接usb2接口的激光制导单元,所述激光制导单元包括镜面反射激光传感器和第二激光雷达转接板。激光制导单元主要依靠镜面反射激光传感器,镜面反射激光传感器由激光发光器与反射激光收光器组成;其中,当镜面反射激光传感器工作时,激光放光器会向水平方向发出连续的不可见波段激光,当激光遇到专用的聚焦反光镜后,会成反射线发射回镜面反射激光传感器,当反射激光收光器收到返回激光以后,镜面反射激光传感器会输出高电平,当反射激光收光器未收到返回激光以后,镜面反射激光传感器会输出低电平,再利用第二激光雷达转接板将电信号传输至工控机,从而实现水平方向的直线制导作用。当车辆正常行驶时,工控机会通过处理高低电平值,来判断车辆行进方向车头是否对准了目标方向。如果车头方向时对准目标方向,则车辆继续沿现有路径直线前进,如果车头方向未对准目标方向,则依据镜面反射激光传感器和激光雷达的偏航检测数据在车辆前进过程中对车头方向进行修正,至到车头对准目标方向为止。激光测距传感器用于对距离进行准确测定,激光测距传感器在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从传感器到目标的距离。
7.优选地,传感模块包括电性连接usb3接口的激光测距单元,所述激光测距单元包括旋转式光电编码器、激光测距传感器和转换器。激光测距单元主要依靠旋转式光电编码器和激光测距传感器,旋转式光电编码器通过测定校准平台的车轴旋转圈数,计算水平行进方向的速度及距离;激光测距传感器利用激光对目标的距离进行准确测定,包括水平行进方向测距、水平车身两侧测距和升降器离地高度测距;其中,激光测距传感器在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从传感器到目标的距离,再利用转换器对数字信号进行转换和传输。
8.优选地,通信透传模块包括电性连接单片机的无线遥控单元、电性连接工控机的无线透传单元和转接器;无线透传单元电性连接有电脑端。无线遥控单元主要用来实现单片机与控制端之间的2.4ghz遥控指令下达,完成控制端操作人员的状态控制指令数据实时下达;无线透传单元主要用来实现工控机与电脑控制端之间的无线数据通信,完成电脑控
制端操作人员的控制指令下达,并且实时获取动态校准平台的各种状态数据。
9.优选地,通信透传模块还包括电性连接单片机的无线遥控接收器。无线遥控接收器支持在无线透传单元无信号或者电脑端故障的情况下独立工作,操作人员通过使用无线遥控器对动态校准平台进行操作。当操作人员按动遥控器上的按钮时,遥控器会将开关量以高低电平信号格式通过2.4g无线频率发送到动态校准平台上的无线遥控接收器,当无线遥控接收器接收到无线遥控信号时,会通过单片机的a16-a21引脚将开关信号传递给单片机,单片机再根据收到的开关信号调用单片机内部指令对车辆的转向电机、直流电机、升降平台进行驱动,完成无线遥控。
10.优选地,还包括供电模组,所述供电模组包括充电器、锂电池仓和降压稳压模块。供电模组主要实现dc48v锂电池接直流降压稳压电路转dc48v、dc24v、dc12v、dc5v直流电压的供电体系。其中,48v直流电为锂电池仓经由20a空气开关保险后直供,24v直流电为直流48v经由降压稳压模块处理后降压到24v进行供电,12v直流电压为直流48v经由降压稳压模块处理后降压到12v进行供电,5v直流电压为直流48v经由降压稳压模块处理后降压到5v进行供电。单片机会经由引脚的数字i/o口通过ttl通讯信号,实时采集并监控锂电池的剩余电量。
11.优选地,升降模块包括相互电性连接的直线推杆电机和继电器组。为满足点状放射源的使用要求,实现垂直升降,加入了升降模块,采用快速固定方式,安装于动态校准平台车架顶板上,操作人员能够通过无线遥控器或电脑控制端下达升降指令,经由无线遥控接收器或无线透传单元接收,控制信号以高低电平信号或rs485格式输出到工控机端或直接下达到单片机端,实现无线远程遥控升降的功能;此外,整套机械机构配合两组一对儿高精度激光测距传感器,一组负责测量小车顶板距离升降器顶部的实时距离,另一组负责测量小车顶板距离地面的实时距离,通过距离求和实现平台高度的实时检测。
12.本发明的有益效果体现在:
13.在本发明中,动态检测的各个功能都在硬件系统的统一布局下实现,系统设计的策略也决定了整个通道式车辆放射性监测系统动态校准平台的功能特点及其可扩展性;其中,动态校准系统具备自动调速、自主循迹、自主避障、自动升降和无线通信等一系列功能,通过模块化设计,划分为主控制模组和副控制模组,分别安装在车架结构的不同位置,通过从上到下的系统性控制实现相关功能;其中,直流电机驱动单元包括直流伺服电机、直流伺服电机驱动器、左后轮编码器和右后轮编码器,从而控制车架结构的行进往返,转向电机驱动单元包括转向电机、转向电机驱动器和左右位移传感器,从而控制车架结构的转弯;进一步地,通过工控机usb1接口、usb2接口、usb3接口电性连接传感模块,实现相应信号采集,实现对动态校准平台的实时监测,还通过通信透传模块来方便动态监测系统的控制和操作;进一步地,通过单片机电性连接有驱动模块、传感模块、升降模块、显示模块、报警模块和灯光控制模块,实现对自动行进、垂直升降、状态感知、信息显示、自动报警、灯光等的控制,进一步方便整个动态校准系统的作业。
附图说明
14.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件
或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
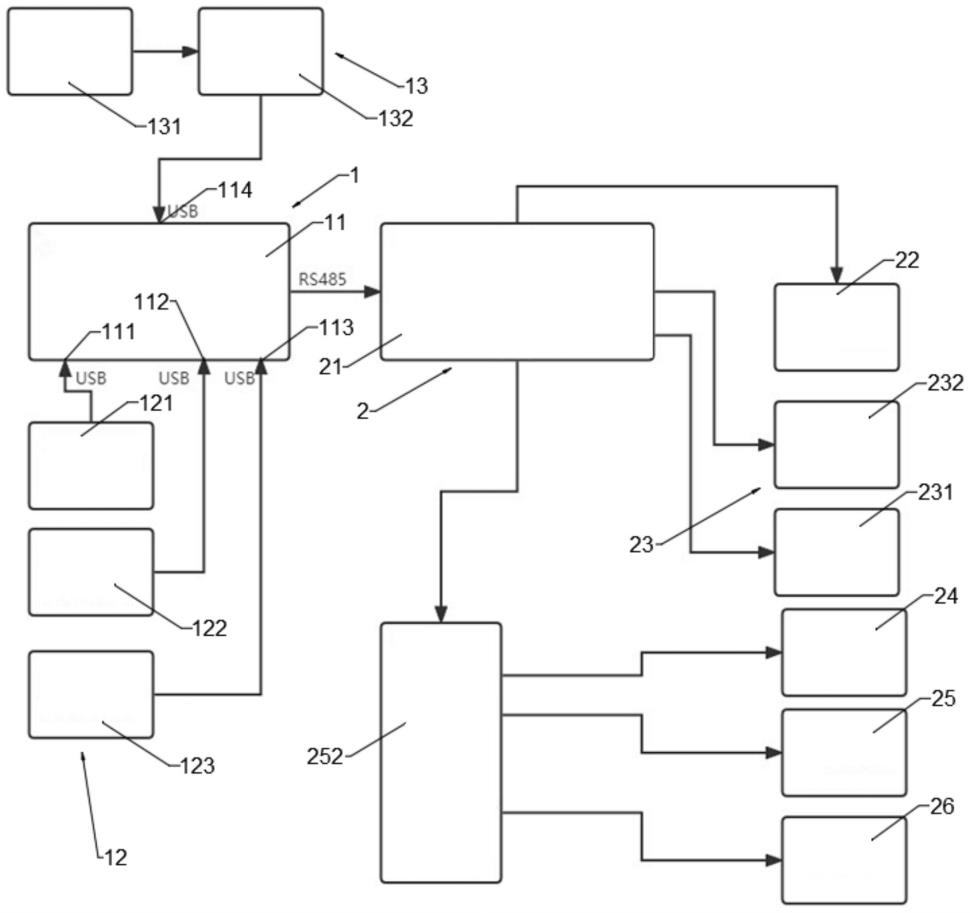
15.图1为本发明的组成示意图;
16.图2为本发明主控制模组的组成示意图;
17.图3为本发明直流电机驱动单元的组成示意图;
18.图4为本发明转向电机驱动单元的组成示意图;
19.图5为本发明激光雷达单元的组成示意图;
20.图6为本发明激光制导单元的组成示意图;
21.图7为本发明激光测距单元的组成示意图;
22.图8为本发明无线透传单元的组成示意图;
23.图9为本发明供电模组的组成示意图;
24.图10为本发明升降模块的组成示意图。
25.附图标记:
26.1-主控制模组,11-工控机,111-usb1接口,112-usb2接口,113-usb3接口,114-usb4接口,115-rs485接口,12-传感模块,121-激光雷达单元,1211-激光雷达本体,1212-第一激光雷达转接板,122-激光制导单元,1221-镜面反射激光传感器,1222-第二激光雷达转接板,123-激光测距单元,1231-激光测距传感器,1232-转换器,13-通信透传模块,131-无线透传单元,132-转接器,133-无线遥控接收器,2-副控制模组,21-单片机,22-显示模块,23-驱动模块,231-直流电机驱动单元,2311-直流伺服电机,2312-直流伺服电机驱动器,2313-左后轮编码器,2314-右后轮编码器,232-转向电机驱动单元,2321-转向电机,2322-转向电机驱动器,2323-左右位移传感器,24-报警模块,25-升降模块,251-直线推杆电机,252-继电器组,26-灯光控制模块,3-供电模组,31-充电器,32-锂电池仓,33-降压稳压模块。
具体实施方式
27.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和出示的本发明实施例的组件可以以各种不同的配置来布置和设计。
28.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
30.在本发明实施方式的描述中,需要说明的是,术语“内”、“外”、“上”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
31.如图1至图10所示,一种通道式车辆放射性动态监测系统,包括主控制模组1和副控制模组2,主控制模组1包括工控机11,副控制模组2包括单片机21,工控机11包括usb1接口111-usb1、usb2接口112-usb2、usb3接口113-usb3、usb4接口114-usb4和rs485接口115-rs485,rs485接口115-rs485电性连接单片机21,单片机21电性连接有显示模块22、驱动模块23、报警模块24、升降模块25和灯光控制模块26;其中,工控机11内设有信号发布模块和主函数调用模块,usb1接口111-usb1、usb2接口112-usb2和usb3接口113-usb3电性连接有传感模块12,usb4接口114-usb4电性连接有通信透传模块13;驱动模块23包括直流电机驱动单元231和转向电机驱动单元232,直流电机驱动单元231包括直流伺服电机2311、直流伺服电机驱动器2312、左后轮编码器2313和右后轮编码器2314,直流伺服电机驱动器2312电性连接单片机21,转向电机驱动单元232包括转向电机2321、转向电机驱动器2322和左右位移传感器2323,转向电机驱动器2322电性连接单片机21。
32.在本实施方式中,需要说明的是,整个通道式车辆放射性动态监测系统包括了机械设计和硬件系统设计,机械设计中包括了车架结构和升降平台,而在硬件系统中,动态检测的各个功能都在硬件系统的统一布局下实现,系统设计的策略也决定了整个通道式车辆放射性监测系统动态检测平台的功能特点及其可扩展性;其中,动态监测系统具备自主循迹、自动调速、自主避障、自动升降和无线通信等一系列功能,通过模块化设计,划分为主控制模组1和副控制模组2,分别安装在车架结构的不同位置,通过从上到下的系统性控制实现相关功能;其中,直流电机驱动单元231包括直流伺服电机2311、直流伺服电机驱动器2312、左后轮编码器2313和右后轮编码器2314,从而控制车架结构的行进往返,转向电机驱动单元232包括转向电机2321、转向电机驱动器2322和左右位移传感器2323,从而控制车架结构的转弯;进一步地,通过工控机11usb1接口111-usb1、usb2接口112-usb2、usb3接口113-usb3电性连接传感模块12,实现相应信号采集,实现对动态检测平台的实时监测,还通过通信透传模块13来方便动态监测系统的控制和操作;进一步地,通过单片机21电性连接有显示模块22、驱动模块23、报警模块24、升降模块25和灯光控制模块26,实现对信息显示、自动驱动、自动报警、自动升降、灯光等的控制,进一步方便整个动态监测系统的作业。
33.具体地,传感模块12包括电性连接usb1接口111-usb1的激光雷达单元121,激光雷达单元121包括激光雷达本体1211和第一激光雷达转接板1212。
34.在本实施方式中,需要说明的是,如图2和图5所示,激光雷达单元121主要起避障与坐标系建立的作用。其中,利用激光雷达本体1211实时测量动态检测平台四周的障碍物,并利用第一激光雷达转接板1212返回距离值,形成点云,在通过点云模糊算法将离散的点云圈连成线与面,从而产生周围障碍物的外观轮廓值,最后将该障碍物外观轮廓值通过工控机11的ros系统基层函数提交到路径规划节点进行路径规划决策,实现车辆避障;其中,坐标系建立原理为,在激光雷达本体1211启动时,即标定为坐标原点(x=0,y=0点),随着动态检测平台的移动,激光雷达本体1211会形成中心点位移轨迹,工控机11ros系统的路径行驶节点会实时计算中心点轨迹与坐标原点在x和y方向上的相对距离,从而形成车辆行驶的坐标系。
35.具体地,传感模块12包括电性连接usb2接口112-usb2的激光制导单元122,激光制导单元122包括镜面反射激光传感器1221和第二激光雷达转接板1222。
36.在本实施方式中,需要说明的是,如图2和图6所示,激光制导单元122主要依靠镜
面反射激光传感器1221,镜面反射激光传感器1221由激光发光器与反射激光收光器组成;其中,当镜面反射激光传感器1221工作时,激光放光器会向水平方向发出连续的不可见波段激光,当激光遇到专用的聚焦反光镜后,会成反射线发射回镜面反射激光传感器1221,当反射激光收光器收到返回激光以后,镜面反射激光传感器1221会输出高电平,当反射激光收光器未收到返回激光以后,镜面反射激光传感器1221会输出低电平,再利用第二激光雷达转接板1222将电信号传输至工控机11,从而实现水平方向的直线制导作用。
37.具体地,传感模块12包括电性连接usb3接口113-usb3的激光测距单元123,激光测距单元123包括激光测距传感器1231和转换器1232。
38.在本实施方式中,需要说明的是,如图2和图7所示,激光测距单元123主要依靠激光测距传感器1231,利用激光对目标的距离进行准确测定,包括水平行进方向测距、水平车身两侧测距和升降器离地高度测距;其中,激光测距传感器1231在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从传感器到目标的距离,再利用转换器1232对数字信号进行转换和传输。
39.具体地,所述传感模块包括电性连接通信透传模块的广角摄像单元,所述广角摄像单元包括广角摄像头和无线中继路由器。
40.具体地,通信透传模块13包括电性连接工控机11的无线透传单元131和转接器132。
41.具体地,无线透传单元131电性连接有电脑端。
42.在本实施方式中,需要说明的是,无线透传单元131主要用来实现工控机11与电脑控制端之间的无线数据通信,完成电脑控制端操作人员的控制指令下达,并且实时获取动态检测平台的各种状态数据。
43.具体地,通信透传模块13还包括电性连接单片机21的无线遥控接收器133。
44.在本实施方式中,需要说明的是,无线遥控接收器133,是针对无线透传单元131无信号或者电脑端故障的情况下,操作人员可以通过使用遥控器对车架结构进行操作。如图8所示,当操作人员按动遥控器上的按钮时,遥控器会将开关量以高低电平信号格式通过2.4g无线频率发送到动态检测平台上的无线遥控接收器133,当无线遥控接收器133接收到无线遥控信号时,会通过单片机21的a16-a21引脚将开关信号传递给单片机21,单片机21再根据收到的开关信号调用单片机21内部指令对车辆的转向电机2321、直流电机、升降平台进行驱动,完成无线遥控。
45.具体地,还包括供电模组3,供电模组3包括充电器31、锂电池仓32和降压稳压模块33。
46.在本实施方式中,需要说明的是,如图9所示,供电模组3主要实现dc48v锂电池接直流降压稳压电路转dc48v、dc24v、dc12v、dc5v直流电压的供电体系。其中,48v直流电为锂电池仓32经由20a空气开关保险后直供,24v直流电为直流48v经由降压稳压模块33处理后降压到24v进行供电,12v直流电压为直流48v经由降压稳压模块33处理后降压到12v进行供电,5v直流电压为直流48v经由降压稳压模块33处理后降压到5v进行供电。单片机21会经由引脚的数字i/o口通过ttl通讯信号,实时采集并监控锂电池的剩余电量。
47.具体地,升降模块25包括相互电性连接的直线推杆电机251和继电器组252。
48.在本实施方式中,需要说明的是,如图10所示,为满足放射源系统使用要求,实现
垂直升降,加入了升降模块25,采用快速固定方式,安装于动态检测平台车架顶板上,操作人员能够通过电脑控制端或遥控器下达升降指令,经由无线透传单元131或无线遥控接收器133接收,控制信号以rs485或高低电平信号格式输出到工控机11端或直接下达到单片机21端,实现无线远程遥控升降的功能;此外,整套机械机构配合两组一对儿高精度激光测距传感器1231,一组负责测量小车顶板距离升降平台的实时距离,另一组负责测量小车顶板距离地面的实时距离,通过距离求和实现平台高度的实时检测。
49.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
