1.本实用新型涉及水域机器人自动控制设备领域,尤其是一种基于无人游船的水域商城。
背景技术:
2.随着人工智能的不断发展,越来越多的智能化装备或无人装置成为研发热点,其中无人船是一种无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,英文缩写为usv。国内许多企业大力研制无人船,不断体现无人船低成本、无随船人员、低风险的优势,最大化体现水域机器人的价值;其中无人游船可布置于各地水域,作为游客的承载工具,为游客提供运输和导游等服务。
3.根据季节性特点,各地均有临时商业展览的需求,例如经常会有各种临时商城,用于推销特色产品,促进民众消费,包括移动的美食展,移动的服装展,移动的扶贫产品展,此类临时商城多采用可移动的展厅材料临时组装而成,通过卡车搬运,请工人搭建或拆解,在陆地上运输虽然较为方便,但是场地租用费用较贵,而且搭建和拆解费时费力,这种商城运作模式陈旧不够新奇,难以有效吸引游客,尤其难以将其复制在水域中。对于水资源的丰富的地区,依水建造移动商城尚无先例,更没有利用无人游船的自主导航技术搭建无人连环游船并形成水域商城的方案。
4.如何将无人游船拼接成无人连环游船,并对无人游船分配功能任务,形成以无人游船为主体的“商店、旅馆、游乐馆”水域商城,成为热点话题。
5.鉴于此,克服上述现有技术所存在的缺陷是本技术领域亟待解决的问题。
技术实现要素:
6.本实用新型需要解决的技术问题是:当前无人游船不能自主拼接形成可移动的水域商场,难以满足沿江区域或湖泊四周民众日益增长的商品展需求。
7.本实用新型通过如下技术方案达到上述目的:提供一种基于无人游船的水域商城,可在监控中心监管下自主停靠码头提供商业活动场所,可根据季节特点移动至指定水域为集市展或商务展提供基础平台,包括浮台游船、门面游船和连接设备;
8.所述连接设备配套的设置在浮台游船和门面游船上,所述连接设备可将浮台游船与浮台游船拼接起来,和/或将浮台游船和门面游船拼接起来,和/或将门面游船与门面游船拼接起来,形成牢固的无人连环游船;
9.所述浮台游船作为水域商城的主干道,多个浮台游船之间可通过连接设备自主串接或并联,从而延长主干道的长度或宽度;
10.所述门面游船作为水域商城的门面房,通过连接设备挂载在浮台游船两侧,可根据商业活动空间需求确定门面游船的数量,其中门面房可以具体用于“商店、旅馆、游乐馆”等;
11.所述浮台游船和门面游船可根据监控中心指令先拼接成无人连环游船而整体航
行至指定水域,也可以先分散编队航行,然后在指定水域自主拼接成无人连环游船,形成可移动的水域商城。
12.进一步的,所述浮台游船包括第一船体、第一控制系统、第一通讯系统、第一导航系统、第一避障系统、第一动力系统和第一能源系统;所述第一控制系统、第一通讯系统、第一导航系统、第一避障系统、第一动力系统和第一能源系统安装于第一船体中,第一控制系统为可编程的控制器,连接并监控第一通讯系统、第一导航系统、第一避障系统、第一动力系统和第一能源系统,实现无人驾驶功能;所述第一通讯系统通过无线模式实现远程通讯;所述第一导航系统可提供定位信息,便于第一控制系统根据定位信息进行路径规划;所述第一避障系统可提供障碍物探测信息,为第一控制系统生成避障方案提供数据支撑;所述第一动力系统可提供划水动力实现第一船体前进、后退、转向;所述第一能源系统包括第一蓄电池和第一油箱,其中第一蓄电池为第一控制系统、第一通讯系统、第一导航系统和第一避障系统提供电力,其中第一油箱为第一动力系统提供燃油;
13.所述门面游船包括第二船体、第二控制系统、第二通讯系统、第二导航系统、第二避障系统、第二动力系统和第二能源系统,所述第二控制系统、第二通讯系统、第二导航系统、第二避障系统、第二动力系统和第二能源系统安装于第二船体中,第二控制系统为可编程的控制器,连接并监控第二通讯系统、第二导航系统、第二避障系统、第二动力系统和第二能源系统,实现无人驾驶功能;所述第二通讯系统通过无线模式实现远程通讯;所述第二导航系统可提供定位信息,便于第二控制系统根据定位信息进行路径规划;所述第二避障系统可提供障碍物探测信息,为第二控制系统生成避障方案提供数据支撑;所述第二动力系统可提供划水动力实现第二船体前进、后退、转向;所述第二能源系统包括第二蓄电池和第二油箱,其中第二蓄电池为第二控制系统、第二通讯系统、第二导航系统和第二避障系统提供电力,其中第二油箱为第二动力系统提供燃油;
14.具体的,所述第一通讯系统和第二通讯系统中包括数字电台、图传电台和/或5g通信卡,便于监控中心与浮台游船之间、监控中心与门面游船,浮台游船和浮台游船之间、门面游船和门面游船之间,浮台游船和门面游船之间通讯;
15.所述第一导航系统和第二导航系统包括gps定位系统、北斗定位系统或惯导系统,其中惯导系统用于确定第一船体或第二船体的姿态;
16.所述第一避障系统和第二避障系统包括船用数字雷达和/或激光雷达,其中数字雷达最远探测距离达130km,激光雷达观测距离范围为0-100m;
17.所述第一动力系统和第二动力系统包括双螺旋桨或双喷泵系统,可快速实现第一船体或第二船体进行原地转向,便于在浮台游船之间、门面游船之间、浮台游船和门面游船之间连接时调整第一船体或第二船体的姿态。
18.进一步的,所述连接设备包括凹接台、凸插台和连接器;
19.所述凹接台为半圆柱型凹槽,设置在浮台游船的一端或侧边,或者单独设置在码头上;
20.所述凸插台为半圆柱型凸台,形状与凹接台相配套,可插入凹接台中,设置在浮台游船的另一端和门面游船的一端;
21.所述凸插台正前端设置鼻台,并在鼻台前端设置摄像头,安装时将摄像头往鼻台内缩入从而防止摄像头被撞击损坏;在凹接台侧面设置与鼻台对应的导向槽并在导向槽中
设置槽压力传感器,用于探测鼻台的位置,从而判断鼻台是否正确插入导向槽,当鼻台插入导向槽并且槽压力传感器的监测值保持在稳定范围,则可判定凸插台正确插入凹接台中;
22.所述连接器包括旋转电机、伸缩杆和挂钩,所述伸缩杆的一端固定在旋转电机的输出轴上,另一端连接所述挂钩;其中伸缩杆动作时可改变挂钩工作高度,旋转电机动作时可改变挂钩旋转角度;
23.当凹接台设置在浮台游船上时,第一控制系统与旋转电机的处理器、伸缩杆的处理器、槽压力传感器相连,第一能源系统中的第一蓄电池为凹接台内用电设备供电;
24.当凹接台脱离浮台游船被单独设置在码头上时,凹接台的内部还设置有第三控制系统、第三通讯系统和第三蓄电池,此时第三控制系统与旋转电机的处理器、伸缩杆的处理器、槽压力传感器相连,并经由第三通讯系统对外通讯,第三蓄电池为凹接台内用电设备供电;其中第三控制系统为可编程的控制器,连接并监控第三通讯系统和第三蓄电池;所述第三通讯系统中包括数字电台、图传电台和/或5g通讯卡;
25.所述凹接台上设置有连接通孔,所述连接器设置在连接通孔中;所述凸插台上设置对应的连接挂孔,并在连接挂孔的前侧设置有连接挂台,除去连接挂台的部位后剩下部位为空档部位,其中连接挂台用于挂接连接器的挂钩,当挂钩挂在连接挂台上端面并压紧时,即可实现凹接台和凸插台的纵向拼接;
26.具体为,当浮台游船与码头连接时,管理员在码头上单独设置凹接台,并将其位置和方向上报监控中心,浮台游船上鼻台前端的摄像头与第一控制系统相连,第一控制系统可根据摄像头拍摄的图像,与事先存储的图像进行对比识别,调整第一船体姿态,使浮台游船的鼻台对准码头上凹接台的导向槽并插入,当鼻台挤压导向槽时,第三控制系统将槽压力传感器的监测值经由第三通讯系统传送给第一通讯系统,第一通讯系统转发给第一控制系统,第一控制系统根据摄像头和槽压力传感器的监测信息进一步调整浮台游船的第一船体的姿态,当槽压力传感器的监测值维持在第一阈值范围时,可判定鼻台完全插入导向槽,实现了连接通孔与连接挂孔的纵向对齐;
27.当后面的浮台游船与前面的浮台游船连接时,后面的浮台游船上第一控制系统与其鼻台前端的摄像头相连,后面的浮台游船上第一控制系统可根据摄像头拍摄的图像,与事先已存储的图像进行对比识别,调整后面的浮台游船的第一船体姿态,使后面的浮台游船的鼻台对准前面的浮台游船的导向槽并插入,当鼻台挤压导向槽时,前面的浮台游船的第一控制系统将槽压力传感器的监测值经由第一通讯系统传送给后面的浮台游船的第一控制系统,后面的浮台游船上第一控制系统根据摄像头和槽压力传感器的监测信息进一步调整后面的浮台游船的第一船体的姿态,当槽压力传感器的监测值维持在第一阈值范围时,可判定鼻台完全插入导向槽,实现了连接通孔与连接挂孔的纵向对齐;
28.当门面游船与浮台游船连接时,门面游船上第二控制系统与其鼻台前端的摄像头相连,第二控制系统可根据摄像头拍摄的图像,与事先已存储的图像进行对比识别,调整第二船体姿态,使门面游船的鼻台对准浮台游船的导向槽并插入,当鼻台挤压导向槽时,浮台游船的第一控制系统将槽压力传感器的监测值经由第一通讯系统传送给第二通讯系统,第二通讯系统转发给第二控制系统,第二控制系统根据摄像头和槽压力传感器的监测信息进一步调整门面游船的第二船体的姿态,当槽压力传感器的监测值维持在第一阈值范围时,可判定鼻台完全插入导向槽,实现了连接通孔与连接挂孔的纵向对齐;
29.初始状态时,当伸缩杆处于最短长度时,挂钩完全缩在连接通孔中,挂钩的顶端不会阻碍凸插台的插入,此时挂钩的钩子朝向连接挂孔的空档部位的中轴线,从而防止伸缩杆伸长过程中顶到连接挂台的底端,当连接通孔与连接挂孔对齐后,启动伸缩杆进行伸长动作使挂钩朝上进入连接挂孔,当伸缩杆处于最大长度时,挂钩完全伸入连接挂孔中,然后启动旋转电机动作调转挂钩的钩子的朝向,使挂钩的钩子朝向连接挂台的中轴线,再启动伸缩杆进行缩短动作使挂钩的钩子牢固的挂载在连接挂台的上端面,实现凹接台和凸插台的纵向拼接,同时伸缩杆挤压着连接挂台的侧壁,将凸插台挤向凹接台,防止挂钩自动从连接挂台上脱钩。
30.进一步的,所述连接设备还包括导向球,所述导向球上端为卡位球,下端为弹簧柱,其中卡位球固定于弹簧柱的顶部;
31.所述凹接台中轴线两侧对称的设置有定位销孔,用于安装导向球;所述凸插台上设置有与定位销孔对应的限位销孔,可盖合在导向球上,辅助凸插台与凹接台横向对齐;
32.具体为,所述弹簧柱插入定位销孔中顶起卡位球,使卡位球的上半球体露在定位销孔外,当凸插台插入凹接台时,凸插台的下端面先将卡位球向下压入定位销孔中,直到定位销孔与对应的限位销孔对齐时,弹簧柱将卡位球向上顶起,卡位球的上半球体卡入限位销孔中,当凹接台中轴线两侧的卡位球都卡入凸插台上对应的限位销孔时,实现连接通孔与连接挂孔的横向对齐,便于连接器的挂钩向上伸人连接挂孔中。
33.进一步的,在所述限位销孔中设置孔压力传感器,第一控制系统或第二控制系统与孔压力传感器相连,并通过孔压力传感器的监测值判断凹接台、凸插台和连接器之间连接状态;
34.具体为,浮台游船上的孔压力传感器与第一控制系统相连,门面游船上的孔压力传感器与第二控制系统相连,当第一控制系统或第二控制系统监测到孔压力传感器返回的压力值持续为零则说明卡位球并未卡入限位销孔中,当第一控制系统或第二控制系统监测到孔压力传感器返回的压力值维持在第二阈值范围时,则说明卡位球已卡入限位销孔中,此时凸插台通过自身重量压住卡位球,当凹接台中轴线两侧的卡位球都卡入凸插台上对应的限位销孔时,然后第一控制系统或第二控制系统驱动连接器动作,驱动挂钩向上伸人连接挂孔中,并牢固的挂载在连接挂台的上端面,当凹接台和凸插台纵向地紧贴连接时,孔压力传感器返回的压力值将达到指定的第三阈值范围并保持稳定。
35.进一步的,所述门面游船上还设置有定位台、液压杆、旋动电机、连接钩、步进电机和摄像头;所述第二控制系统连接并监控液压杆的处理器、旋动电机的处理器、步进电机的处理器和摄像头;
36.所述定位台设置在第二船体尾端,所述旋动电机设置在定位台的右端,所述液压杆设置在旋动电机的输出轴上,所述连接钩固定在步进电机的输出端,通过步进电机可旋转地设置在液压杆的前端;所述定位台的左端设置有与连接钩尺寸相匹配的连接凹孔,其中连接凹孔的入口的宽度大于连接钩宽度但是小于连接钩的长度与宽度之和的50%,连接凹孔的入口的长度大于连接钩长度;连接凹孔的内部空间的宽度和长度都大于连接钩的长度,从而确保连接钩可从连接凹孔的入口平行地进入,当连接钩进入连接凹孔后,再旋转至与连接凹孔的入口垂直时可牢固的挂住连接凹孔,不至于自动脱落;所述摄像头安装在连接钩的前侧面,可为第二控制系统图像识别时提供图像,辅助连接钩进入连接凹孔;
37.具体为,当浮台游船侧面相邻位置已经连接有多艘门面游船时,可将相邻的左侧门面游船和右侧门面游船进行横向拼接,初始状态下,左侧门面游船上液压杆与左侧门面游船的第二船体纵向平行,左侧的门面游船上第二控制系统在摄像头的引导下,驱动液压杆动作改变液压杆的长度,并驱动旋动电机动作改变液压杆角度,并驱动步进电机动作改变连接钩角度,确保左侧门面游船的连接钩可从右侧门面游船的连接凹孔的入口平行地进入,当左侧门面游船的液压杆与左侧门面游船的第二船体垂直后,此时连接钩已进入连接凹孔的内部,再驱动步进电机动作带动连接钩在连接凹孔的内部旋转,使连接钩与连接凹孔的入口内端面垂直,从而使连接钩垂直的挂住连接凹孔的内端面,进而使左侧的门面游船的连接钩挂住右侧的门面游船的定位台,实现左侧的门面游船与右侧的门面游船横向拼接,使浮台游船、左侧的门面游船、右侧的门面游船和液压杆之间形成刚性四边形,提升无人连环游船的整体稳定性。
38.进一步的,所述凹接台的前端设置凹型槽,初始静态水平状态下,凸插台的底端面比凹接台的上端面稍微高一点,在凸插台插入凹接台过程中,存在凸插台和凹接台在水体中非同步起伏垂荡的现象,会导致凸插台的底端面比凹接台的上端面低的情况,导致插入受阻,所述凹型槽设置为斜向上的方向,可引导凸插台插入并自动与凹接台对齐,从而降低由第一船体或第二船体垂荡导致凸插台水平插入凹接台的难度;
39.所述连接挂台下端开设锥型坡;初始静态水平状态下,当连接通孔与连接挂孔的对齐后,驱动连接器的挂钩的钩子朝向连接挂孔的空档部位的中轴线,此时挂钩刚好可以从空档部位通过,在伸缩杆顶起挂钩的过程中,存在凸插台和凹接台在水体中非同步横荡或纵荡的现象,会导致挂钩的钩子顶住连接挂台下端面无法继续上升的情况;将连接挂台下端开设锥型坡,则增加斜坡同时扩大入口面积,便于引导连接器的挂钩插入连接挂孔并到达连接挂台的上端,从而降低由第一船体或第二船体横荡或纵荡导致连接挂台下端面阻挡连接器的挂钩插入的风险;
40.所述连接凹孔的入口处开设梯形坡,初始静态水平状态下,当左侧门面游船上的连接钩,在摄像头引导下水平对准右侧门面游船连接凹孔的开口,当连接钩从连接凹孔的开口正中间进入的过程中,存在左侧门面游船和右侧门面游船在水体中非同步摇晃的现象,导致连接钩错过连接凹孔的开口难以进入,当连接凹孔的入口处开设梯形坡时,增加斜坡同时扩大入口面积,便于连接钩平行地进入连接凹孔。
41.进一步的,将所述连接挂台移动至连接挂孔前侧左方或右方并占用连接挂孔三分之一面积,在连接挂孔前侧紧邻连接挂孔的空档部位增设倒角槽,所述倒角槽占用连接挂孔三分之一面积,连接挂孔仅剩下的三分之一面积作为空档部位;
42.所述倒角槽的正面为朝上的槽齿,背面设置片状弹簧,并通过片状弹簧挂载在连接挂孔的侧壁上;所述挂钩尺寸与倒角槽尺寸相对应,当连接器插入连接挂孔时,先旋转所述挂钩的钩子,使其朝向连接挂孔的倒角槽的中轴线,挂钩的钩子前端挤压着槽齿,同时将凸插台挤向凹接台,在伸缩杆进行伸长动作推动挂钩上升的过程中,挂钩的钩子会逐步钩住倒角槽上方的槽齿,确保挂钩只能向上步进,不能先下退出,尤其是当凸插台和凹接台异步晃动时,挂钩的钩子向上自动顶起会自动推进挂钩的钩子沿着倒角槽上升;当连接器需要退出连接挂孔时,先将伸缩杆驱动至最大长度,使挂钩高过连接挂台上端面,然后旋转挂钩的钩子,使其完全避开倒角槽和连接挂孔,朝向连接挂孔的空档部位的中轴线,然后伸缩
杆进行缩短动作即可将挂钩无障碍退出连接挂孔。
43.所述槽压力传感器具体为安装在导向槽中的贴片压力传感器,孔压力传感器具体为安装在限位销孔中的贴片压力传感器。
44.在所述浮台游船和门面游船上还设置有栏杆,在空闲的凹接台或连接挂孔的上端设置有相应的安全盖,确保游客在水域商城上安全游玩。
45.本实用新型相比现有技术具有以下优点。
46.1、通过连接设备自动实现浮台游船与浮台游船拼接起来,和/或将浮台游船和门面游船拼接起来,和/或将门面游船与门面游船拼接起来,形成牢固的无人连环游船,形成可移动的水域商城,降低商城用地租金,降低搭建和拆解的周期和费用;其中浮台游船还可以自动连接到指定码头上,从而将整个无人连环游船抛锚定位,便于游客进入水域商城消费。
47.2、通过浮台游船形成水域商城的主干道,多个浮台游船之间可通过连接设备自主串接或并联,从而延长主干道的长度或宽度。
48.3、通过门面游船形成水域商城的门面房,自主挂载在浮台游船两侧,可根据商业活动空间需求增减门面游船的数量。
49.4、所述门面游船可根据整体规划挂载到浮台游船的不同拼接点,改变整体空间布局,从而使无人连环游艇适应不同大小的水域空间;所述无人连环艇系统可整体移动,适用于大水域环境内的慢速移动,也可以完全拆解进行编队航行,便于所有浮台游船与浮台游船依序通过狭窄的河流。
50.5、通过鼻台和导向槽实现连接通孔与连接挂孔的纵向对齐;通过定位销孔、导向球和限位销孔实现连接通孔与连接挂孔横向对齐。
51.6、通过凹接台的前端设置凹型槽,连接挂台下端开设锥型坡,连接凹孔的入口处开设梯形坡,降低自动连接的难道。
附图说明
52.为了更清楚地说明本实用新型实施例的技术方案,下面将对本实用新型实施例中所需要使用的附图作简单地介绍。显而易见地,下面所描述的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
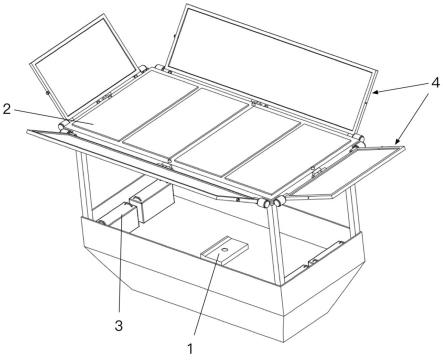
53.图1为实施例1中水域商城拼接完成后整体前侧俯视立体图。
54.图2为实施例1中将凹接台单独安装在码头上立体图。
55.图3为实施例1中浮台游船加载连接设备时后侧俯视立体图。
56.图4为实施例1中浮台游船加载连接设备时前侧仰视立体图。
57.图5为实施例1中浮台游船上凸插台放大观察时前侧俯视立体图。
58.图6为实施例1中浮台游船上凹接台放大观察时前侧俯视立体图。
59.图7为实施例1中门面游船加载连接设备时前侧俯视立体图。
60.图8实施例中1门面游船上凸插台放大观察时前侧仰视立体图。
61.图9实施例中1门面游船上凸插台放大观察时前侧俯视立体图。
62.图10为实施例1中门面游船加载连接设备时后侧俯视立体图。
63.图11为实施例1中门面游船上定位台放大观察时后侧俯视立体图。
64.图12为实施例1中门面游船上定位台及其连接凹孔放大观察时剖视立体图。
65.图13为实施例1中连接挂孔及其连接挂台放大观察时剖视立体图。
66.图14为实施例1中旋转电机、伸缩杆及挂钩组装后孤立的立体图。
67.图15为实施例1中导向球孤立时立体图。
68.图16为实施例1中液压杆、步进电机、连接钩及摄像头组装后孤立的立体图。
69.图17为实施例1中倒角槽孤立时立体图。
70.图18为实施例2中挂钩的钩子沿着倒角槽进入连接挂孔时的工作状态图。
71.图19为实施例2中挂钩压住连接挂台上端面时的工作状态图。
72.图20为实施例2中挂钩的钩子沿着空档部位退出连接挂孔时的工作状态图。
73.图21为实施例2中第1号浮台游船对准码头上凹接台准备拼接或者拆解完毕撤离时的工作状态图。
74.图22为实施例2中后面浮台游船和前面浮台游船拼接完毕时孤立的工作状态图。
75.图23为实施例2中第n号浮台游船和第n-1号浮台游船拼接完毕时孤立的工作状态图。
76.图24为实施例2中门面游船对准浮台游船的凹接台准备拼接或者拆解完毕撤离时孤立的工作状态图。
77.图25为实施例2中浮台游船侧面的相邻的门面游船横向拼接完毕后孤立的工作状态图。
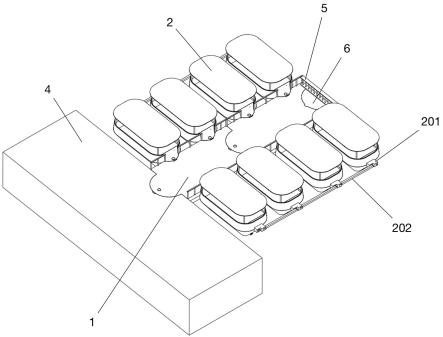
78.图26为实施例2中浮台游船和门面游船编号指示图。
79.图中:1-浮台游船;2-门面游船;3-连接设备;4-码头;5-栏杆;6-安全盖;201-定位台;202-液压杆;203-旋动电机;204-连接钩;205-步进电机;206-连接凹孔;301-凹接台;302-凸插台;304-鼻台;305-摄像头;306-导向槽;307-槽压力传感器;308-旋转电机;309-伸缩杆;310-挂钩;311-连接通孔;312-连接挂孔;313-连接挂台;314-导向球;315-卡位球;316-弹簧柱;318-定位销孔;319-限位销孔;320-孔压力传感器;321-凹型槽;322-锥型坡;323-梯形坡;324-倒角槽;325-槽齿;326-片状弹簧;11-第1号浮台游船;12-第2号浮台游船;13-第1号门面游船;14-第2号门面游船;15-第3号门面游船;16-第4号门面游船;17-第5号门面游船;18-第6号门面游船;19-第7号门面游船;20-第8号门面游船。
具体实施方式
80.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
81.在本实用新型的描述中,术语“内”、“外”、“纵向”、“横向”、“上”、“下”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不应当理解为对本实用新型的限制。
82.此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。下面就参考附图和实施例结合来详细说明本实用新型。
83.实施例1,如图1-17所示,提供一种基于无人游船的水域商城,可在监控中心监管下自主停靠码头4提供商业活动场所,可根据季节特点移动至指定水域为集市展或商务展提供基础平台,其中无人游船分为浮台游船1和门面游船2;此水域商城中还包括连接设备3,所述连接设备3配套的设置在浮台游船1和门面游船2上,所述连接设备3可将浮台游船1与浮台游船1拼接起来,和/或将浮台游船1和门面游船2拼接起来,和/或将门面游船2与门面游船2拼接起来,形成牢固的无人连环游船;
84.所述浮台游船1作为水域商城的主干道,多个浮台游船1之间可通过连接设备3自主串接或并联,从而延长主干道的长度或宽度;
85.所述门面游船2作为水域商城的门面房,通过连接设备3挂载在浮台游船1两侧,可根据商业活动空间需求确定门面游船2的数量,其中门面房可以具体用于“商店、旅馆、游乐馆”等;
86.所述浮台游船1和门面游船2可根据监控中心指令先拼接成无人连环游船而整体航行至指定水域,也可以先分散编队航行,然后在指定水域自主拼接成无人连环游船,形成可移动的水域商城;
87.具体的,所述浮台游船1长为50m、宽为20m,所述门面游船2长为20m,宽为7m。
88.本实施例中,所述浮台游船1包括第一船体、第一控制系统、第一通讯系统、第一导航系统、第一避障系统、第一动力系统和第一能源系统;所述第一控制系统、第一通讯系统、第一导航系统、第一避障系统、第一动力系统和第一能源系统安装于第一船体中,第一控制系统为可编程的控制器,具体为以sim32f系列cpu处理器为核心组成的控制箱,连接并监控第一通讯系统、第一导航系统、第一避障系统、第一动力系统和第一能源系统,实现无人驾驶功能;所述第一通讯系统通过无线模式实现远程通讯;所述第一导航系统可提供定位信息,便于第一控制系统根据定位信息进行路径规划;所述第一避障系统可提供障碍物探测信息,为第一控制系统生成避障方案提供数据支撑;所述第一动力系统可提供划水动力实现第一船体前进、后退、转向;所述第一能源系统包括第一蓄电池和第一油箱,其中第一蓄电池型号为 6-cq-195a/12v195ah,为第一控制系统、第一通讯系统、第一导航系统和第一避障系统提供电力,其中第一油箱为第一动力系统提供燃油;
89.所述门面游船2包括第二船体、第二控制系统、第二通讯系统、第二导航系统、第二避障系统、第二动力系统和第二能源系统,所述第二控制系统、第二通讯系统、第二导航系统、第二避障系统、第二动力系统和第二能源系统安装于第二船体中,第二控制系统为可编程的控制器,具体为以sim32f系列cpu处理器为核心组成的控制箱,连接并监控第二通讯系统、第二导航系统、第二避障系统、第二动力系统和第二能源系统,实现无人驾驶功能;所述第二通讯系统通过无线模式实现远程通讯;所述第二导航系统可提供定位信息,便于第二控制系统根据定位信息进行路径规划;所述第二避障系统可提供障碍物探测信息,为第二控制系统生成避障方案提供数据支撑;所述第二动力系统可提供划水动力实现第二船体前进、后退、转向;所述第二能源系统包括第二蓄电池和第二油箱,其中第二蓄电池型号为 6-cq-195a/12v195ah,为第二控制系统、第二通讯系统、第二导航系统和第二避障系统提供电力,其中第二油箱为第二动力系统提供燃油;
90.具体的,所述第一通讯系统和第二通讯系统中包括数字电台、图传电台和5g通信卡,便于监控中心与浮台游船1之间、监控中心与门面游船2,浮台游船1和浮台游船1之间、
门面游船2和门面游船2之间,浮台游船1和门面游船2之间通讯;
91.所述第一导航系统和第二导航系统包括北斗定位系统和惯导系统,其中惯导系统用于确定第一船体或第二船体的姿态;
92.所述第一避障系统和第二避障系统包括船用smr-7200数字雷达和leddar64线激光雷达,其中数字雷达最远探测距离达130km,激光雷达观测距离范围为0-100m;
93.所述第一动力系统和第二动力系统包括双螺旋桨,具体为船用24v强劲无刷螺旋桨推进器,第一船体中第一个螺旋桨安装于第一船体的前侧底部,另一个螺旋桨安装于第一船体的后侧底部,可快速实现第一船体进行原地转向,第二船体中第一个螺旋桨安装于第二船体的前侧底部,另一个螺旋桨安装于第二船体的后侧底部,可快速实现第二船体进行原地转向;便于在浮台游船1之间、门面游船2之间、浮台游船1和门面游船2之间连接时调整第一船体或第二船体的姿态。
94.本实施例中,所述连接设备3包括凹接台301、凸插台302和连接器;
95.如图3、图6所示,所述凹接台301为半圆柱型凹槽,设置在浮台游船1的一端或侧边,或者单独设置在码头4上;
96.如图5、图7-9所示,所述凸插台302为半圆柱型凸台,形状与凹接台301相配套,可插入凹接台301中,设置在浮台游船1的另一端和门面游船2的一端;
97.具体为,其中浮台游船1一端凸插台302的尺寸与浮台游船1另一端凹接台301的尺寸对应,便于浮台游船1和浮台游船1纵向拼接;门面游船2一端的凸插台302的尺寸与浮台游船1侧边凹接台301的尺寸对应,便于将门面游船2挂载到浮台游船1的两侧。
98.如图5、图7-9所示,所述凸插台302正前端设置鼻台304,并在鼻台304前端设置摄像头305,安装时将摄像头305往鼻台304内缩入1cm从而防止摄像头305被撞击损坏;如图6所示,在凹接台301侧面设置与鼻台304对应的导向槽306并在导向槽306中设置槽压力传感器307,用于探测鼻台304的位置,从而判断鼻台304是否正确插入导向槽306,当鼻台304插入导向槽306并且槽压力传感器307的监测值保持在稳定范围1-500n,则可判定凸插台302正确插入凹接台301中,其中达到1n说明鼻台304开始挤压导向槽306,如果挤压力太大也会损坏导向槽306或使其横向大幅度推动,所以当槽压力传感器307的监测值超过500n时,应当减小鼻台304向前的冲力,使鼻台304以适当的力度插入导向槽306;
99.如图14所示,所述连接器包括旋转电机308、伸缩杆309和挂钩310,所述伸缩杆309的一端固定在旋转电机308的输出轴上,另一端连接所述挂钩310;其中伸缩杆309动作时可改变挂钩310工作高度,旋转电机308动作时可改变挂钩310旋转角度;其中旋转电机308为12v小型正反转直流电机;伸缩杆309为滚珠丝杆结构的电动伸缩杆309;
100.当凹接台301设置在浮台游船1上时,第一控制系统与旋转电机308的处理器、伸缩杆309的处理器、槽压力传感器307相连,第一能源系统中的第一蓄电池为凹接台301内用电设备供电;
101.当凹接台301脱离浮台游船1被单独设置在码头4上时,如图2所示,凹接台301的内部还设置有第三控制系统、第三通讯系统和第三蓄电池,此时第三控制系统与旋转电机308的处理器、伸缩杆309的处理器、槽压力传感器307相连,并经由第三通讯系统对外通讯,第三蓄电池为凹接台301内用电设备供电;其中第三控制系统为可编程的控制器,连接并监控第三通讯系统和第三蓄电池,具体为以sim32f系列cpu处理器为核心组成的控制箱,所述第
三通讯系统中包括数字电台、图传电台和5g通讯卡;第三蓄电池型号为 6-cq-195a/12v195ah;
102.如图2、6所示,所述凹接台301上设置有连接通孔311,深度为40cm,所述连接器设置在连接通孔311中;如图8、9、13所示,所述凸插台302上设置对应的连接挂孔312,并在连接挂孔312的前侧设置有连接挂台313,高度为20cm,除去连接挂台313的部位后剩下部位为空档部位,其中连接挂台313用于挂接连接器的挂钩310,当挂钩310挂在连接挂台313上端面并压紧时,即可实现凹接台301和凸插台302的纵向拼接;
103.具体为,当浮台游船1与码头4连接时,管理员先在码头4上单独设置凹接台301,并将其位置和方向上报监控中心,浮台游船1上鼻台304前端的摄像头305与第一控制系统相连,第一控制系统可根据摄像头305拍摄的图像,与事先存储的图像进行对比识别,调整第一船体姿态,使浮台游船1的鼻台304对准码头4上凹接台301的导向槽306并插入,当鼻台304挤压导向槽306时,第三控制系统将槽压力传感器307的监测值经由第三通讯系统传送给第一通讯系统,第一通讯系统转发给第一控制系统,第一控制系统根据摄像头305和槽压力传感器307的监测信息进一步调整浮台游船1的第一船体的姿态,当槽压力传感器307的监测值维持在第一阈值范围1-500n时,可判定鼻台304完全插入导向槽306,实现了连接通孔311与连接挂孔312的纵向对齐;
104.当后面的浮台游船1与前面的浮台游船1连接时,后面的浮台游船1上第一控制系统与其鼻台304前端的摄像头305相连,后面的浮台游船1上第一控制系统可根据摄像头305拍摄的图像,与事先已存储的图像进行对比识别,调整后面的浮台游船1的第一船体姿态,使后面的浮台游船1的鼻台304对准前面的浮台游船1的导向槽306并插入,当鼻台304挤压导向槽306时,前面的浮台游船1的第一控制系统将槽压力传感器307的监测值经由第一通讯系统传送给后面的浮台游船1的第一控制系统,后面的浮台游船1上第一控制系统根据摄像头305和槽压力传感器307的监测信息进一步调整后面的浮台游船1的第一船体的姿态,当槽压力传感器307的监测值维持在指定的第一阈值范围1-500n时,可判定鼻台304完全插入导向槽306,实现了连接通孔311与连接挂孔312的纵向对齐;
105.当门面游船2与浮台游船1连接时,门面游船2上第二控制系统与其鼻台304前端的摄像头305相连,第二控制系统可根据摄像头305拍摄的图像,与事先已存储的图像进行对比识别,调整第二船体姿态,使门面游船2的鼻台304对准浮台游船1的导向槽306并插入,当鼻台304挤压导向槽306时,浮台游船1的第一控制系统将槽压力传感器307的监测值经由第一通讯系统传送给第二通讯系统,第二通讯系统转发给第二控制系统,第二控制系统根据摄像头305和槽压力传感器307的监测信息进一步调整门面游船2的第二船体的姿态,当槽压力传感器307的监测值维持在第一阈值范围1-500n时,可判定鼻台304完全插入导向槽306,实现了连接通孔311与连接挂孔312的纵向对齐;
106.初始状态时,当伸缩杆309处于最短长度5cm时,挂钩310完全缩在连接通孔311中,挂钩310的顶端不会阻碍凸插台302的插入,此时挂钩310的钩子朝向连接挂孔312的空档部位的中轴线,从而防止伸缩杆309伸长过程中顶到连接挂台313的底端,当连接通孔311与连接挂孔312对齐后,启动伸缩杆309进行伸长动作使挂钩310朝上进入连接挂孔312,当伸缩杆309处于最大长度35cm时,挂钩310完全伸入连接挂孔312中,并且高过连接挂台313上端面10cm,然后启动旋转电机308动作调转挂钩310的钩子的朝向,使挂钩310的钩子朝向连接
挂台313的中轴线,再启动伸缩杆309进行缩短动作使挂钩310的钩子牢固的挂载在连接挂台313的上端面,实现凹接台301和凸插台302的纵向拼接,同时伸缩杆309挤压着连接挂台313的侧壁,将凸插台302挤向凹接台301,防止挂钩310自动从连接挂台313上脱钩。
107.本实施例中,如图15所示,为了进一步促进凸插台302和凹接台301的对齐,所述连接设备3还包括导向球314,所述导向球314上端为卡位球315,直径16cm,下端为弹簧柱316,长度15cm,其中卡位球315固定于弹簧柱316的顶部;
108.如图6、8所示,所述凹接台301中轴线两侧对称的设置有定位销孔318,用于安装导向球314;所述凸插台302上设置有与定位销孔318对应的限位销孔319,可盖合在导向球314上,辅助凸插台302与凹接台301横向对齐;
109.具体为,所述弹簧柱316插入定位销孔318中顶起卡位球315,使卡位球315的上半球体露在定位销孔318外,当凸插台302插入凹接台301时,凸插台302的下端面先将卡位球315向下压入定位销孔318中,直到定位销孔318与对应的限位销孔319对齐时,弹簧柱316将卡位球315向上顶起,卡位球315的上半球体卡入限位销孔319中,当凹接台301中轴线两侧的卡位球315都卡入凸插台302上对应的限位销孔319时,实现连接通孔311与连接挂孔312的横向对齐,便于连接器的挂钩310向上伸人连接挂孔312中。
110.本实施例中,在所述限位销孔319中设置孔压力传感器320,第一控制系统或第二控制系统与孔压力传感器320相连,并通过孔压力传感器320的监测值判断凹接台301、凸插台302和连接器之间连接状态;
111.具体为,浮台游船1上的孔压力传感器320与第一控制系统相连,门面游船2上的孔压力传感器320与第二控制系统相连,当第一控制系统或第二控制系统监测到孔压力传感器320返回的压力值持续为零则说明卡位球315并未卡入限位销孔319中,当第一控制系统或第二控制系统监测到孔压力传感器320返回的压力值维持在第二阈值范围1-500n时,则说明卡位球315已卡入限位销孔319中,此时凸插台302通过自身重量压住卡位球315,孔压力传感器320返回的压力值会由于凹接台301和凸插台302垂荡运动而波动性变化,当凹接台301中轴线两侧的卡位球315都卡入凸插台302上对应的限位销孔319时,然后第一控制系统或第二控制系统驱动连接器动作,驱动挂钩310向上伸人连接挂孔312中,并牢固的挂载在连接挂台313的上端面,当凹接台301和凸插台302纵向地紧贴连接时,孔压力传感器320返回的压力值将达到指定的第三阈值范围500-600n,由于凹接台301和凸插台302已经被纵向地紧贴在一起,所以此时孔压力传感器320返回的压力值保持稳定,不会大幅波动。
112.本实施例中,如图10-12和图16所示,所述门面游船2上还设置有定位台201、液压杆202、旋动电机203、连接钩204、步进电机205和摄像头305;所述第二控制系统连接并监控液压杆202的处理器、旋动电机203的处理器、步进电机205的处理器和摄像头305;其中连接钩204的长度为20cm,宽度为8cm;
113.所述定位台201设置在第二船体尾端,所述旋动电机203设置在定位台201的右端,所述液压杆202设置在旋动电机203的输出轴上,所述连接钩204固定在步进电机205的输出端,通过步进电机205可旋转地设置在液压杆202的前端;所述定位台201的左端设置有与连接钩204尺寸相匹配的连接凹孔206,长度40cm,宽度12cm,其中连接凹孔206的入口的宽度大于连接钩204宽度但是小于连接钩204的长度与宽度之和的50%,连接凹孔206的入口的长度大于连接钩204长度;连接凹孔206的内部空间的宽度和长度都大于连接钩204的长度,从
而确保连接钩204可从连接凹孔206的入口平行地进入,当连接钩204进入连接凹孔206后,再旋转至与连接凹孔206的入口垂直时可牢固的挂住连接凹孔206,不至于自动脱落;所述摄像头305安装在连接钩204的前侧面,可为第二控制系统图像识别时提供图像,辅助连接钩204进入连接凹孔206;
114.具体为,当浮台游船1侧面相邻位置已经连接有多艘门面游船2时,可将相邻的左侧门面游船2和右侧门面游船2进行横向拼接,初始状态下,左侧门面游船2上液压杆202与左侧门面游船2的第二船体纵向平行,左侧的门面游船2上第二控制系统在摄像头305的引导下,驱动液压杆202动作改变液压杆202的长度,并驱动旋动电机203动作改变液压杆202角度,并驱动步进电机205动作改变连接钩204角度,确保左侧门面游船2的连接钩204可从右侧门面游船2的连接凹孔206的入口平行地进入,当左侧门面游船2的液压杆202与左侧门面游船2的第二船体垂直后,此时连接钩204已进入连接凹孔206的内部,再驱动步进电机205动作带动连接钩204在连接凹孔206的内部旋转,使连接钩204与连接凹孔206的入口内端面垂直,从而使连接钩204垂直的挂住连接凹孔206的内端面,进而使左侧的门面游船2的连接钩204挂住右侧的门面游船2的定位台201,实现左侧的门面游船2与右侧的门面游船2横向拼接,使浮台游船1、左侧门面游船2、右侧门面游船2和液压杆202之间形成刚性四边形,提升无人连环游船的整体稳定性。
115.本实施例中,如图2、6所示,所述凹接台301的前端设置凹型槽321,初始静态水平状态下,凸插台302的底端面比凹接台301的上端面稍微高1-5cm,在凸插台302插入凹接台301过程中,存在凸插台302和凹接台301在水体中非同步起伏垂荡的现象,会导致凸插台302的底端面比凹接台301的上端面低的情况,导致插入受阻,所述凹型槽321设置为斜向上45度方向,可引导凸插台302插入并自动与凹接台301对齐,从而降低由第一船体或第二船体垂荡导致凸插台302水平插入凹接台301的难度;
116.如图13所示,所述连接挂台313下端开设30度的锥型坡322;初始静态水平状态下,当连接通孔311与连接挂孔312的对齐后,驱动连接器的挂钩310的钩子朝向连接挂孔312的空档部位的中轴线,此时挂钩310刚好可以从空档部位通过,在伸缩杆309顶起挂钩310的过程中,存在凸插台302和凹接台301在水体中非同步横荡或纵荡的现象,会导致挂钩310的钩子顶住连接挂台313下端面无法继续上升的情况;将连接挂台313下端开设锥型坡322,则增加斜坡同时扩大入口面积,便于引导连接器的挂钩310插入连接挂孔312并到达连接挂台313的上端,从而降低由第一船体或第二船体横荡或纵荡导致连接挂台313下端面阻挡连接器的挂钩310插入的风险;
117.如图10-12所示,所述连接凹孔206的入口处开设45度的梯形坡323,初始静态水平状态下,当左侧门面游船2上的连接钩204,在摄像头305引导下水平对准右侧门面游船2连接凹孔206的开口,当连接钩204从连接凹孔206的开口正中间进入的过程中,存在左侧门面游船2和右侧门面游船2在水体中非同步摇晃的现象,导致连接钩204错过连接凹孔206的开口难以进入,当连接凹孔206的入口处开设梯形坡323时,增加斜坡同时扩大入口面积,便于连接钩204平行地进入连接凹孔206。
118.本实施例中,如图5、8、9和17所示,将所述连接挂台313移动至连接挂孔312前侧左方或右方并占用连接挂孔312三分之一面积,在连接挂孔312前侧紧邻连接挂孔312的空档部位增设倒角槽324,所述倒角槽324占用连接挂孔312三分之一面积,连接挂孔312仅剩下
的三分之一面积作为空档部位;
119.所述倒角槽324的正面为朝上的槽齿325,背面设置片状弹簧326,并通过片状弹簧326挂载在连接挂孔312的侧壁上,其中槽齿325宽度1.2cm,间距2cm,挂钩310的钩子前端厚度为0.5cm,挂钩310的钩子可以挂入槽齿325中;所述挂钩310尺寸与倒角槽324尺寸相对应,当连接器插入连接挂孔312时,先旋转所述挂钩310的钩子,使其朝向连接挂孔312的倒角槽324的中轴线,挂钩310的钩子前端挤压着槽齿325,同时将凸插台302挤向凹接台301,在伸缩杆309进行伸长动作推动挂钩310上升的过程中,挂钩310的钩子会逐步钩住倒角槽324上方的槽齿325,挂入深度为3mm,确保挂钩310只能向上步进,不能先下退出,尤其是当凸插台302和凹接台301异步晃动时,挂钩310的钩子向上自动顶起时会自动推进挂钩310的钩子沿着倒角槽324上升;当连接器需要退出连接挂孔312时,先将伸缩杆309驱动至最大长度,使挂钩310高过连接挂台313上端面,然后旋转挂钩310的钩子,使其完全避开倒角槽324和连接挂孔312,朝向连接挂孔312的空档部位的中轴线,然后伸缩杆309进行缩短动作即可将挂钩310无障碍退出连接挂孔312。
120.本实施例中,在所述浮台游船1和门面游船2上还设置有栏杆5,在空闲的凹接台301或连接挂孔312的上端设置有相应的安全盖6,确保游客在水域商城上安全游玩。
121.实施例2:如图1、3、4和图18-26所示,实施例1中基于无人游船的水域商城的运行方法包括以下过程:
122.s1.将浮台游船1和门面游船2移动至目标水域;
123.s2.将浮台游船1拼接至码头4指定位置,后面浮台游船1拼接至前面浮台游船1上,形成主干道;
124.s3.将门面游船2拼接至指定浮台游船1上,形成门面房;
125.s4.将相邻的门面游船2进行横向拼接,形成完整的无人连环游船;
126.s5.拆解无人连环游船;
127.本实施例中,选用2艏浮台游船1和8艏门面游船2拼接成无人连环游船,形成可自主移动的水域商城,2艏浮台游船1串联形成主干道,使水域商城总长度达到100m,每艏浮台游船1的每一侧各挂载2艏门面游船2,使水域商城总宽度达到60m;
128.上述过程s1具体包括:首先管理人员向监控中心汇报所有的浮台游船1的内部编号,定义为第1号浮台游船11至第n号浮台游船,其中n等于2为浮台游船1总数目,各浮台游船1的第一控制系统记录自身的编号;向监控中心汇报所有门面游船2的内部编号,定义为第1号门面游船13、第2号门面游船14至第m号门面游船,其中m等于8为门面游船2总数目,各门面游船2的第二控制系统记录自身的编号,细化的步骤如下;
129.s101.每艘浮台游船1通过第一导航系统确定自身的位置,并通过第一通讯系统将其编号和位置信息发送给其它的浮台游船1和门面游船2;每艘门面游船2通过第二导航系统确定自身的位置,并通过第二通讯系统将其编号和位置信息发送给其它的浮台游船1和门面游船2,从而使每艘浮台游船1和门面游船2实时掌握其它浮台游船1和门面游船2的编号和位置信息;第一控制系统、第二控制系统和第三控制系统均保存有凹接台301相关的图片信息;
130.s102. 监控中心将目标水域的位置通过无线通讯的方式下发给所有的浮台游船1的第一通讯系统和门面游船2的第二通讯系统,使所有的浮台游船1和门面游船2获得目标
水域的地址;浮台游船1的第一控制系统根据当前位置和目标水域的位置规划航线,门面游船2的第二控制系统根据当前位置和目标水域的位置规划航线;
131.s103. 监控中心向所有的浮台游船1和门面游船2下发开始航行指令,第1号浮台游船11最先航行,当第1号浮台游船11航行至与起点指定距离100m时,第1号浮台游船11给第2号浮台游船12发送间距安全的确定信号,然后第2号浮台游船12启动航行,跟在第1号浮台游船11后方,并保持安全距离;当第2号浮台游船12航行至与起点指定距离100m时,第2号浮台游船12给第1号门面游船13发送间距安全的确定信号,然后第1号门面游船13启动航行,跟在第2号浮台游船12后方,并保持安全距离,当第1号门面游船13航行至与起点指定距离100m时,第1号门面游船13给第2号门面游船14发送间距安全的确定信号,然后第2号门面游船14启动航行,跟在第1号门面游船13的后方,并保持安全距离,以此类推,直到第8号门面游船20启动航行;从而形成一个整体的航行编队,在第1号浮台游船11带领下前往目标水域;
132.s104.在航行过程中,由于所有的浮台游船1和门面游船2起点和终点都相同,所以各自规划的航线也基本相同,所有浮台游船1不断更新其它浮台游船1和门面游船2的位置信息,调整自身的航行速度,保持航行编队的整体性;所有的浮台游船1在自主航行过程中利用第一避障系统收集障碍信息完成避障并及时进行分享;所有的门面游船2在自主航行过程中利用第二避障系统收集障碍信息完成避障并及时进行分享;尤其是可避免动态障碍物对整体的航行编队的冲击,通过共享障碍物信心防止部分浮台游船1或门面游船2探测失败,能在其它大型船只穿越航行编队时,对浮台游船1和门面游船2进行整体地安全引导,从而顺利达到目标水域;
133.上述过程s2具体包括:管理人员先在目标水域的码头4单独设置一个凹接台301,并将此凹接台301的位置和方向信息上报给监控中心,从而使各第1号浮台游船11获知所需拼接凹接台301的位置和方向信息,细化的步骤如下;
134.s201.当第1号浮台游船11到达目标水域后,如图21所示,根据码头4上凹接台301的位置信息,调整第1号浮台游船11的位置,降低航行速度缓慢靠近码头4上凹接台301,同时根据码头4上凹接台301的方位信息,调整第1号浮台游船11的姿态,使第1号浮台游船11上的凸插台302正对着码头4上凹接台301;
135.s202. 第1号浮台游船11的第一控制系统实时接收鼻台304前端的摄像头305拍摄的图像,并与提前存储的凹接台301相关图片信息进行对比,不断调整第一船体的姿态和位置,使第1号浮台游船11的鼻台304对准码头4上凹接台301的导向槽306并插入,当鼻台304挤压导向槽306时,凹接台301中第三控制系统将槽压力传感器307的监测值经由第三通讯系统传送给第一通讯系统,第一通讯系统转发给第1号浮台游船11的第一控制系统,第一控制系统根据摄像头305和槽压力传感器307的监测信息进一步调整第1号浮台游船11的第一船体的姿态和位置,当槽压力传感器307的监测值维持在第一阈值1-500n范围时,可判定鼻台304完全插入导向槽306,实现了连接通孔311与连接挂孔312的纵向对齐;
136.s203.当第1号浮台游船11的凸插台302插入码头4上凹接台301时,凸插台302的下端面先将卡位球315向下压入定位销孔318中,直到定位销孔318与对应的限位销孔319对齐时,弹簧柱316将卡位球315向上顶起,卡位球315的上半球体卡入限位销孔319中,当凹接台301中轴线两侧的卡位球315都卡入凸插台302上对应的限位销孔319时,凸插台302通过自
身重量压住卡位球315,当第一控制系统监测到孔压力传感器320返回的压力值持续为零则说明卡位球315并未卡入限位销孔319中,监测到孔压力传感器320返回的压力值维持在第二阈值范围1-500n时,则说明卡位球315已卡入限位销孔319中,实现连接通孔311与连接挂孔312横向对齐。
137.s204.当第1号浮台游船11的凸插台302与码头4上凹接台301之间实现纵向和横向对齐时,初始状态下,凹接台301上伸缩杆309处于最短长度5cm时,挂钩310完全缩在连接通孔311中,第三控制系统启动旋转电机308动作使挂钩310的钩子朝向连接挂孔312中倒角槽324的中轴线,在伸缩杆309进行伸长动作推动挂钩310上升的过程中,挂钩310的钩子前端紧贴住倒角槽324,挂钩310的钩子会逐步挤压并钩住倒角槽324的槽齿325,确保挂钩310只能向上步进,不能先下退出,直到伸缩杆309处于最大长度35cm时,挂钩310的钩子超过连接挂孔312的上端面10cm;
138.s205. 当伸缩杆309处于最大长度时,第三控制系统启动旋转电机308动作调转挂钩310的钩子的朝向,使挂钩310的钩子朝向连接挂台313的中轴线,再启动伸缩杆309进行缩短动作,只需缩短10cm,使挂钩310的钩子牢固的挂载在连接挂台313的上端面,当凹接台301和凸插台302纵向地紧贴在一起时,实现凹接台301和凸插台302的纵向拼接,从而使第1号浮台游船11拼接在码头4上,此时孔压力传感器320返回的压力值将达到指定的第三阈值范围500-800n,并保持稳定;
139.s206.当第1号浮台游船11拼接在码头4上后,第2号浮台游船12根据第1号浮台游船11上另一端凹接台301的位置信息,调整第2号浮台游船12的位置,降低航行速度缓慢靠近第1号浮台游船11上对应的的凹接台301,同时根据第1号浮台游船11上凹接台301的方位信息,调整第2号浮台游船12的姿态,使第2号浮台游船12上的凸插台302正对着第1号浮台游船11上对应的凹接台301;如图22、23所示,参考s202
‑ꢀ
s205内容,使第2号浮台游船12拼接在第1号浮台游船11上,完成水域商城整个主干道的拼接;
140.上述过程s3具体包括:管理人员先将门面游船2分配给指定的浮台游船1,并将门面游船2需要挂载的凹接台301的位置和方向信息上报给监控中心,从而使各门面游船2获知所需拼接凹接台301的位置和方向信息,如图26所示,具体为,将第1号门面游船13挂载在第1号浮台游船11的左侧前端,将第2号门面游船14挂载在第1号浮台游船11的左侧后端,将第3号门面游船15挂载在第1号浮台游船11的右侧前端,将第4号门面游船16挂载在第1号浮台游船11的右侧后端,将第5号门面游船17挂载在第2号浮台游船12的左侧前端,将第6号门面游船18挂载在第2号浮台游船12的左侧后端,将第7号门面游船19挂载在第2号浮台游船12的右侧前端,将第8号门面游船20挂载在第2号浮台游船12的右侧后端,细化的步骤如下;
141.s301.在水域商城整个主干道拼接完毕后,如图24所示,第1号门面游船13根据对应的凹接台301的位置信息,调整第1号门面游船13的位置,降低航行速度缓慢靠近对应的凹接台301,同时根据对应的凹接台301的方位信息,调整第1号门面游船13的姿态,使第1号门面游船13上的凸插台302正对着对应的凹接台301;
142.s302. 第1号门面游船13的第二控制系统实时接收鼻台304前端的摄像头305拍摄的图像,并与提前存储的凹接台301相关图片信息进行对比,不断调整第二船体的姿态和位置,使第1号门面游船13的鼻台304对准对应凹接台301的导向槽306并插入,当鼻台304挤压导向槽306时,凹接台301中第一控制系统将槽压力传感器307的监测值经由第一通讯系统
传送给第二通讯系统,第二通讯系统转发给第1号门面游船13的第二控制系统,第二控制系统根据摄像头305和槽压力传感器307的监测信息进一步调整第1号门面游船13的第二船体的姿态和位置,当槽压力传感器307的监测值维持在第一阈值范围1-500n时,可判定鼻台304完全插入导向槽306,实现了连接通孔311与连接挂孔312的纵向对齐;
143.s303.当第1号门面游船13的凸插台302插入对应凹接台301时,凸插台302的下端面先将卡位球315向下压入定位销孔318中,直到定位销孔318与对应的限位销孔319对齐时,弹簧柱316将卡位球315向上顶起,卡位球315的上半球体卡入限位销孔319中,当凹接台301中轴线两侧的卡位球315都卡入凸插台302上对应的限位销孔319时,凸插台302通过自身重量压住卡位球315,当第二控制系统监测到孔压力传感器320返回的压力值持续为零则说明卡位球315并未卡入限位销孔319中,监测到孔压力传感器320返回的压力值维持在第二阈值范围1-500n时,则说明卡位球315已卡入限位销孔319中,实现连接通孔311与连接挂孔312横向对齐。
144.s304.当第1号门面游船13的凸插台302与对应凹接台301之间实现纵向和横向对齐时,初始状态下,凹接台301上伸缩杆309处于最短长度5cm时,挂钩310完全缩在连接通孔311中,第一控制系统启动旋转电机308动作使挂钩310的钩子朝向连接挂孔312中倒角槽324的中轴线,如图18所示,在伸缩杆309进行伸长动作推动挂钩310上升的过程中,挂钩310的钩子前端紧贴住倒角槽324,挂钩310的钩子会逐步挤压并钩住倒角槽324的槽齿325,确保挂钩310只能向上步进,不能先下退出,直到伸缩杆309处于最大长度35cm时,挂钩310的钩子超过连接挂孔312的上端面10cm;
145.s305. 当伸缩杆309处于最大长度时,第一控制系统启动旋转电机308动作调转挂钩310的钩子的朝向,使挂钩310的钩子朝向连接挂台313的中轴线,再启动伸缩杆309进行缩短动作,只需缩短10cm,使挂钩310的钩子牢固的挂载在连接挂台313的上端面,当凹接台301和凸插台302纵向地紧贴在一起时,实现凹接台301和凸插台302的纵向拼接,从而使第1号门面游船13拼接在对应浮台游船1的指定凹接台301上,此时孔压力传感器320返回的压力值将达到指定的第三阈值范围500-800n并保持稳定;
146.s306.当第1号门面游船13拼接在对应浮台游船1的指定凹接台301后,第2号门面游船14根据与其对应浮台游船1的凹接台301的位置信息,调整第2号门面游船14的位置,降低航行速度缓慢靠近对应的凹接台301,同时根据对应的凹接台301的方位信息,调整第2号门面游船14的姿态,使第2号门面游船14上的凸插台302正对着对应的凹接台301;参考s302
‑ꢀ
s205内容,使第2号门面游船14拼接在对应浮台游船1的指定凹接台301;
147.s307. 参考s306内容,依序使第3号至第8号门面游船20拼接在对应浮台游船1的指定凹接台301,完成水域商城整个门面房的拼接;
148.上述过程s4具体包括:各门面游船2根据其它门面游船2的所连接凹接台301的位置确定其右侧是否有门面游船2,细化的步骤如下;
149.s401.如果左侧门面游船2的右侧邻近位置有门面游船2,则需要将相邻的左侧门面游船2和右侧门面游船2进行横向拼接,初始状态下,左侧门面游船2上液压杆202与左侧门面游船2的第二船体纵向平行,左侧的门面游船2上第二控制系统在对应摄像头305的引导下,驱动液压杆202动作改变液压杆202的长度,并驱动旋动电机203动作改变液压杆202角度,并驱动步进电机205动作改变连接钩204角度,确保左侧门面游船2的连接钩204可从
右侧门面游船2的连接凹孔206的入口平行地进入,当左侧门面游船2的液压杆202与左侧门面游船2的第二船体垂直后,再驱动步进电机205动作带动连接钩204在连接凹孔206的内部旋转,具体为顺时针旋转90度或逆时针旋转90度,使连接钩204与连接凹孔206的入口内端面垂直,从而使连接钩204垂直的挂住连接凹孔206的内端面,进而使左侧的门面游船2的连接钩204挂住右侧的门面游船2的定位台201,实现左侧的门面游船2与右侧的门面游船2横向拼接;
150.s402.参考s401内容,将所有相邻的门面游船2进行横向拼接,形成完整的无人连环游船;具体结果如图25所示,第1号门面游船13与第2号门面游船14横向拼接在一起,第3号门面游船15与第4号门面游船16横向拼接在一起,第5号门面游船17与第6号门面游船18横向拼接在一起,第7号门面游船19与第8号门面游船20横向拼接在一起,第2号门面游船14与第5号门面游船17横向拼接在一起,第4号门面游船16与第7号门面游船19横向拼接在一起;
151.上述过程s5具体包括:当水域商城需要移动至下一个目标水域时,可将现有的水域商城进行拆解,细化的步骤如下:
152.s501.拆解门面游船2之间的横向拼接:初始状态下,左侧门面游船2的连接钩204垂直的挂住右侧门面游船2的连接凹孔206的内端面,左侧门面游船2的的第二控制系统驱动步进电机205动作带动连接钩204在连接凹孔206的内部旋转,具体为顺时针旋转90度或逆时针旋转90度,使连接钩204与连接凹孔206的入口平行,然后驱动旋动电机203动作改变液压杆202角度,使连接钩204完全脱离连接凹孔206,进而使左侧门面游船2上液压杆202与左侧门面游船2的第二船体纵向平行,然后驱动液压杆202动作将液压杆202缩短至原始状态,从而将左侧门面游船2与右侧门面游船2之间横向拆解,以此类推,拆解所有门面游船2之间的横向拼接;
153.s502.拆解门面房,将门面游船2从浮台游船1上拆解下来:初始状态下,如图19所示,浮台游船1上凹接台301的挂钩310的钩子朝向门面游船2上连接挂台313的中轴线并牢固的挂载在连接挂台313的上端面,第一控制系统驱动伸缩杆309进行伸长动作使其处于最大长度状态,然后驱动旋转电机308动作带动挂钩310旋转,使挂钩310的钩子朝向连接挂孔312的空档部位的中轴线,如图20所示,再驱动伸缩杆309进行缩短动作至最短长度状态即可将挂钩310退出连接挂孔312,门面游船2的第二动力系统动作将门面游船2划行至安全间隔区域;以此类推,将所有门面游船2从浮台游船1上拆解下来;
154.s503.拆解主干道,将后面浮台游船1从前面浮台游船1上拆解下来:初始状态为,后面第2号浮台游船12拼接在前面的第1号浮台游船11上,第1号浮台游船11上凹接台301的挂钩310的钩子朝向第2号浮台游船12上连接挂台313的中轴线并牢固的挂载在连接挂台313的上端面,第1号浮台游船11上的第一控制系统驱动伸缩杆309进行伸长动作使其处于最大长度状态,然后驱动旋转电机308动作带动挂钩310旋转,使挂钩310的钩子朝向连接挂孔312的空档部位的中轴线,再驱动伸缩杆309进行缩短动作至最短长度状态即可将挂钩310退出连接挂孔312,第2号浮台游船12的第一动力系统动作将第2号浮台游船12划行至安全间隔区域;
155.s504.将第1号浮台游船11从码头4上拆解下来:初始状态为,第1号浮台游船11拼接在码头4的凹接台301上,码头4上凹接台301的挂钩310的钩子朝向第1号浮台游船11上连
接挂台313的中轴线并牢固的挂载在连接挂台313的上端面;码头4上凹接台301的第三控制系统驱动伸缩杆309进行伸长动作使其处于最大长度状态,然后驱动旋转电机308动作带动挂钩310旋转,使挂钩310的钩子朝向连接挂孔312的空档部位的中轴线,再驱动伸缩杆309进行缩短动作至最短长度状态即可将挂钩310退出连接挂孔312,第1号浮台游船11的第一动力系统动作将第1号浮台游船11划行至安全间隔区域;完成整个主干道的拆解;
156.s505. 参考s1内容将所有浮台游船1和门面游船2移动至下一个目标水域。
157.在实施例2的运行方法中,在凸插台302与凹接台301拼接或拆解过程中,还可以通过调整双螺旋桨的出力来提高成功率,具体为,在凸插台302插入凹接台301时,适当减小靠近凸插台302的螺旋桨的出力10%,同时适当增大远离凸插台302的螺旋桨的出力10%,从而使凸插台302侧翘起5-15度,便于凸插台302从上方压向凹接台301并完成插入和连接;在凸插台302从凹接台301上拆解过程中,当连接器退出连接挂孔312后,靠近凸插台302的螺旋桨的向后上方适当出力,远离凸插台302的螺旋桨不出力,从而使凸插台302翘起5-15度,并推动凸插台302离开凹接台301。
158.在实施例2的运行方法中,在凸插台302与凹接台301对准时,还可以通过激光雷达进行辅助对准,具体为,通过凸插台302侧对应的激光雷达识别凹接台301的位置和方向,尤其是扫描并识别凹接台301上导向槽306状态信息,从而为凸插台302侧第一船体或第二船体姿态调整提供数据支持。
159.在实施例2的运行方法中,当水域面积非常大,也不实施过程s5的拆解过程,而直接在第1号浮台游船11的统领下,协调出力,以无人连环游船整体形式,进行水域移动,保持无人连环游船整体划行,能进一步提供整体抗风浪能力。
160.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。