1.本实用新型涉及机器人技术领域,尤其涉及一种多轴机械臂。
背景技术:
2.多轴机械臂能够模仿人类手和臂的动作,可实现一些重复的抓取、搬运、使用工具等作业,多轴机械臂普遍包含多个可活动的关节模组,而各个关节模组通过控制器来控制,现有技术中,部分多轴机械臂的关节模组与控制器之间所连接的电线直接在外部走线,然后通过波纹管对裸露在外部的电线进行保护,其缺陷在于,露在外面的电线、波纹管容易与其它设备产生牵扯,存在潜在的危险。
技术实现要素:
3.本实用新型的目的在于实现内部走线,避免电线外露而导致与其它设备产生牵扯,一定程度上消除了潜在的危险。
4.为了实现上述目的,本实用新型所采取的技术方案如下:
5.一种多轴机械臂,包括控制器、第一关节模组、第二关节模组和第三关节模组;
6.所述第一关节模组包括第一壳体、第一驱动机构和第一中空减速机,所述控制器和第一中空减速机均固定在第一壳体上,所述第一驱动机构驱动第一中空减速机转动;
7.所述第二关节模组包括第二壳体、第二驱动机构和第二旋转平台减速机,所述第一中空减速机带动第二壳体转动,所述第二旋转平台减速机固定设置在第二壳体上,所述第二驱动机构驱动第二旋转平台减速机转动,所述第二旋转平台减速机带动第三关节模组转动,所述第二壳体上开设有引线孔,所述第二壳体的内部通过引线孔与第三关节模组的内部连通。
8.进一步地,还包括第四关节模组,所述第三关节模组包括第三臂、第三驱动机构和第三中空减速机,所述第三臂内部中空,且第三臂的内部通过引线孔与第二壳体内部连通,所述第三中空减速机固定设置在第三臂上;
9.所述第四关节模组包括第四壳体、第四驱动机构和第四中空减速机,所述第三驱动机构和第四驱动机构均固定设置在第四壳体内,所述第三驱动机构驱动第三中空减速机转动,所述第三中空减速机带动第三臂转动;
10.所述第四驱动机构驱动第四中空减速机转动,所述第四减速机固定设置在第四壳体上。
11.进一步地,所述第三臂上开设有检修孔,所述检修孔处固定有孔盖。
12.进一步地,还包括第五关节模组,所述第五关节模组包括第五臂、第五驱动机构和第五减速机,所述第四中空减速机带动第五臂转动,所述第五减速机设置在第五臂上,所述第五驱动机构驱动第五减速机转动。
13.进一步地,还包括第六关节模组,所述第六关节模组包括第六壳体和第六驱动机构,所述第六驱动机构固定设置在第六壳体内,所述第五减速机带动第六壳体转动。
14.进一步地,所述第五关节模组还包括第五轴承,所述第五轴承的内圈和外圈分别与第五臂和第六壳体固定连接,所述第五臂的内部与第六壳体的内部通过第五轴承的内圈连通。
15.进一步地,还包括连接法兰,所述第六驱动机构驱动连接法兰转动。
16.本实用新型的有益效果为:本实用新型通过将控制器直接固定设置在第一壳体上,第三关节模组的电线通过引线孔进入第二壳体内部,在第二壳体的内部进行走线,同时与第二关节模组的电线进行汇合后,穿过第一中空减速机中部的中空部,进入第一壳体,在第一壳体内部走线后,与控制器进行相应的电性连接,与传统技术中在外部排线相比,本实用新型实现了内部走线,避免电线外露而导致与其它设备产生牵扯,一定程度上消除了潜在的危险。
附图说明
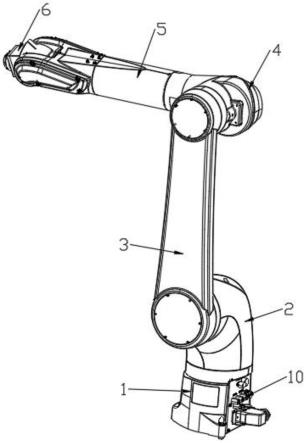
17.图1是本实用新型的整体结构示意图;
18.图2是隐藏第一壳体后的结构示意图;
19.图3是图2中的a处放大图;
20.图4是隐藏第二壳体后的结构示意图;
21.图5是图4中的b处放大图;
22.图6是隐藏第四壳体后的结构示意图;
23.图7是图6中的c处放大图;
24.图8是本实用新型的部分结构示意图;
25.图9是图8中的d处放大图;
26.图10是本实用新型的部分结构示意图;
27.图11是图10中的e处放大图。
28.附图标记为:
29.控制器10,
30.第一关节模组1,第一壳体11,第一驱动机构12,第一中空减速机13,
31.第二关节模组2,第二壳体21,第二驱动机构22,第二旋转平台减速机23,
32.第三关节模组3,第三臂31,第三驱动机构32,第三中空减速机33,
33.第四关节模组4,第四壳体41,第四驱动机构42,第四中空减速机43,
34.第五关节模组5,第五臂51,第五驱动机构52,第五减速机53,第五轴承54,
35.第六关节模组6,第六壳体61,第六驱动机构62,
36.连接法兰7。
具体实施方式
37.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明;在下面的描述中阐述了很多具体细节以便于充分理解本实用新型;但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
38.如图1至图10所示的一种多轴机械臂,包括控制器10、第一关节模组1、第二关节模组2、第三关节模组3、第四关节模组4、第五关节模组5、第六关节模组6和连接法兰7。
39.第一关节模组1包括第一壳体11、第一驱动机构12和第一中空减速机13,控制器10和第一中空减速机13均固定在第一壳体11上,第一驱动机构12驱动第一中空减速机13转动,第一中空减速机13中部的中空部利于穿引电线。
40.第二关节模组2包括第二壳体21、第二驱动机构22和第二旋转平台减速机23,第一中空减速机13带动第二壳体21转动,第二旋转平台减速机23固定设置在第二壳体21上,第二驱动机构22驱动第二旋转平台减速机23转动,第二旋转平台减速机23带动第三关节模组3转动,第二壳体21上开设有引线孔,第二壳体21的内部通过引线孔与第三关节模组3的内部连通。
41.第一壳体11和第二壳体21的内部均为中空状,第二驱动机构22的电线和第二旋转平台减速机23的电线穿过第一中空减速机13中部的中空部,进入第一壳体11,在第一壳体11内部走线后,与控制器10进行相应的电性连接,从而避免电线外露而导致与其它设备产生牵扯,一定程度上消除了潜在的危险。
42.第三关节模组3包括第三臂31、第三驱动机构32和第三中空减速机33,第三臂31内部中空,且第三臂31的内部通过引线孔与第二壳体21内部连通,第三中空减速机33固定设置在第三臂31上。
43.第三臂31的内部为中空状,第三驱动机构32的电线和第三中空减速机33的电线通过引线孔进入第二壳体21内部,在第二壳体21的内部进行走线,同时与第二关节模组2的电线进行汇合。
44.第三臂31上开设有检修孔,检修孔处固定有孔盖,检修孔利于人们检查第三臂31内部的电线排布状况。
45.第四关节模组4包括第四壳体41、第四驱动机构42和第四中空减速机43,第三驱动机构32和第四驱动机构42均固定设置在第四壳体41内,第三驱动机构32通过第三齿轮组件驱动第三中空减速机33转动,第三中空减速机33带动第三臂31转动。
46.第四驱动机构42通过第四齿轮组件驱动第四中空减速机43转动,第四减速机固定设置在第四壳体41上。
47.第二旋转平台减速机23和第三中空减速机33分别位于第三臂31的两端,第四驱动机构42的电线和第四中空减速机43的电线共同穿过第三中空减速机33中部的中空部,进入第三臂31的内部,在第三臂31内部与第三驱动机构32的电线和第三中空减速机33的电线汇合。
48.第五关节模组5包括第五臂51、第五驱动机构52、第五减速机53和第五轴承54,第四中空减速机43带动第五臂51转动,第五减速机53设置在第五臂51上,第五驱动机构52驱动第五减速机53转动。
49.第五臂51的内部为中空状,第五驱动机构52的电线和第五减速机53的电线在第五臂51内排线,并穿过第四中空减速机43中部的中空部,与第四驱动机构42的电线和第四中空减速机43的电线汇合。
50.第六关节模组6包括第六壳体61和第六驱动机构62,第六驱动机构62固定设置在第六壳体61内,第五减速机53带动第六壳体61转动。
51.第五轴承54的内圈与第五臂51固定连接,第五轴承54的外圈与第六壳体61固定连接,第五轴承54的内圈中部中空,第五臂51的内部与第六壳体61的内部通过第五轴承54的内圈连通;第六驱动机构62的电线穿过第五轴承54的内圈,进入第五臂51内,并与第五驱动机构52的电线和第五减速机53的电线汇合。
52.第六驱动机构62驱动连接法兰7转动,在连接法兰7上开设有装配孔,用于执行末端机械爪进行装配。
53.在本实施例中,第一驱动机构12为第一电机,第二驱动机构22为第二电机,第三驱动机构32为第三电机,第四驱动机构42为第四电机,第五驱动机构52为第五电机,第六驱动机构62为第六电机。
54.本实用新型的工作原理为:第六驱动机构62的电线穿过第五轴承54的内圈,进入第五臂51内,并与第五驱动机构52的电线和第五减速机53的电线汇合;第五驱动机构52的电线和第五减速机53的电线在第五臂51内排线,并穿过第四中空减速机43中部的中空部,与第四驱动机构42的电线和第四中空减速机43的电线汇合;第四驱动机构42的电线和第四中空减速机43的电线共同穿过第三中空减速机33中部的中空部,进入第三臂31的内部,在第三臂31内部与第三驱动机构32的电线和第三中空减速机33的电线汇合;第三驱动机构32的电线和第三中空减速机33的电线通过引线孔进入第二壳体21内部,在第二壳体21的内部进行走线,同时与第二关节模组2的电线进行汇合;第二驱动机构22的电线和第二旋转平台减速机23的电线穿过第一中空减速机13中部的中空部,进入第一壳体11,在第一壳体11内部走线后,与控制器10进行相应的电性连接,从而避免电线外露而导致与其它设备产生牵扯,一定程度上消除了潜在的危险。
55.以上所揭露的仅为本发明的较佳实施例,不能以此来限定本发明的权利保护范围,因此依本发明申请专利范围上所作的等同变化,仍属本发明所涵盖的范围,以上并非对本发明的技术范围作任何限制,凡依据本发明技术实质对以上的实施例所作的任何修改、等同变化与修饰,均仍属于本发明的技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
