1.本实用新型专利涉及机器视觉领域,尤其涉及一种基于机器视觉的大枣无损检测分级装置。
背景技术:
2.目前,我国是世界上枣树种植面积最多、产量最高的国家,年产量已经超过725万吨。大枣的分级是其产后处理的一个关键环节,当前中国大枣分级主要有人工分级和机械分级。人工分级简单直接,但是分级效率低,容易受到分级人员的身体状况和心情因素的影响,不能准确判断,且分级标准因人而异缺乏客观性和规范性。机械分级仅仅可以根据大枣的大小、尺寸进行分级,不能对大枣的表型特征和外观特征进行检测,而且机械分级会对大枣表面有一定的损伤,还不能剔除病虫、畸形、损伤的大枣,还需要和进一步的人工分拣,随着机器视觉技术的迅速发展,应用机器视觉技术对大枣外部品质进行无损检测分级,是实现大枣采摘后自动化分级的重要发展方向,可以减少人工分级误判,在一定程度上还可以避免机械分级对大枣表面的损伤,还可以大大提高分级效率等优点。
技术实现要素:
3.为了解决减轻大枣分级的劳动力和机械分级给对大枣表面有一定的损伤的问题,本实用新型专利提供了一种基于机器视觉大枣无损检测分级装置,代替人工对大枣的分级,实现大枣的智能化、自动化,节省人力成本。
4.为了解决上述技术问题,本实用新型采用的方案是:
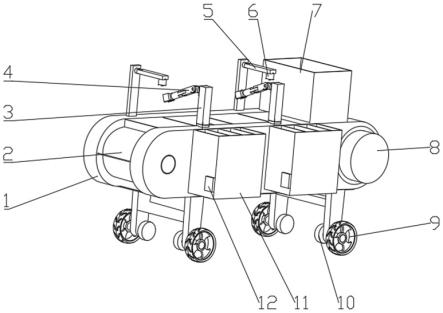
5.一种基于机器视觉大枣无损检测分级装置,包括机身、机械臂、传动装置、ccd摄像机、装枣箱,所述机身是整个大枣无损检测分级装置的安装主体,所述机身由一块底板、两块支撑板和四根带有滚轮的支撑腿组成,所述机身内部设置有小型步进电机,所述小型步进电机为机械臂提供动力,所述机械臂的另一侧设有两个ccd摄像机,机身的右侧设置有一个直流电机,所述直流电机为传送装置提供动力,所述传送装置的上方设有一个装枣箱;
6.作为本实用新型的进一步改进,所述机械臂包括:底盘、a级舵机、转臂、b级舵机、a级摆臂、c级舵机、b级摆臂、d级舵机、安装座、f级舵机、夹枣手,底盘固定安装在可旋转立柱上,a级舵机设置在底盘内部,转臂的一端连接着a级舵机的输出轴,转臂的另一端内部设置有b级舵机,a级摆臂的一端连接着b级舵机的输出轴,a级摆臂的另一端连接着c级舵机的输出轴,b级摆臂一端内部设置有c级舵机,b级摆臂另一端内部设置有d级舵机,安装座固定安装在d级舵机的输出轴上,安装座内部设置有f级舵机,夹枣手固定安装在f级舵机的输出轴上。
7.作为本实用新型的进一步改进,所述收集箱设有重量传感器,当所收集的大枣的重量达到一定的值时,报警器发出报警,由控制箱控制机械臂不在抓取,同时控制带有小型电机的四个滚轮将整个装置运送的指定的位置。
8.作为本实用新型的进一步改进,所述ccd摄像机,通过两个ccd摄像机对大枣进行
大小、果形、色泽、果面缺陷和损伤等指标进行检测定位和识别,可以根据大小、果形、色泽、果面缺陷和损伤等特征进行更加精细化分级,ccd摄像机连接在一个可以旋转的悬臂上,悬臂连接在转关节一端上,转关节另一端固定在ccd摄像机支撑杆上。
9.作为本实用新型的进一步改进,所述传动装置包括设置在机身右侧的一个直流电机,直流电机固定在机身内部右侧,主动辊子与直流电机的输出轴相连,从动辊子设置在主动辊子的另一侧,传送带与主动辊子与从动辊子连接。
10.从上述技术方案可以看出,本实用新型具备结构简单、易拆卸、易维修、可检测大枣的缺陷并分级的特点;此机器视觉大枣无损检测分级装置通过传送带将装枣箱中的大枣逐个输送到ccd摄像机下,通过ccd摄像机对大枣进行定位和识别大枣是否有缺陷,可以根据形状、颜色等特征进行更加精细化分级;通过机械臂将已经检测出来的有缺陷的大枣和各个等级的大枣分别夹到相应的框子里;机器视觉大枣无损检测分级装置让大枣的分级智能化、自动化、更加精细化。
附图说明
11.图1为本实用新型的正三轴测图。
12.图2为本实用新型的俯视图。
13.图3为本实用新型的传送带的正三轴测图。
14.图4为本实用新型的装枣箱的主视图。
15.图5为本实用新型的ccd摄像机的正视图。
16.图6 为本实用新型的收集箱的左视图。
17.图7 为本实用新型的小型步进电机的正视图。
18.图8为本实用新型的机械臂的正三轴测图。
19.1.机身,2.传送装置,3. 可旋转立柱,4.机械臂,5. ccd摄像机转臂,6.ccd摄像机,7.装枣箱,8. 直流电机,9.滚轮,10.小型直流电机,11.收集箱,12.重力传感器,13.电源箱,14.控制箱,15.主动辊子,16.从动辊子,17.溜枣板,18. ccd摄像机支撑杆,19.转关节,20.螺栓,21. ccd摄像机部件,22.重量传感器,23.报警器,24.小型步进电机,1-3.夹枣手,1-4.f级舵机,1-5. 夹枣手安装座,1-6.d级舵机,1-7.b级摆臂,1-8.c级舵机,1-9.a级摆臂,2-1.b级舵机,2-2.转臂,2-3.a级舵机,2-4.机械臂安装座。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
21.实施例:如图1、图2所示的基于机器视觉大枣无损检测分级装置,机身1是整个大枣无损检测分级装置的安装主体,机身1机身由一块底板、两块支撑板和四根支撑腿构成,传动装置2设置在机身中间,收集箱11设置在机身一侧,装枣箱7设置在传动装置2设置的上方,直流电机8带动传送装置2运动,大枣通过装枣箱7逐个落入到传送装置2上,由传送装置2将大枣输送到ccd摄像机6下方,ccd摄像机6连接在一个可以旋转的悬臂上,悬臂连接在转关节一端上,转关节另一端固定在ccd摄像机支撑杆18上,通过ccd摄像机6对大枣进行定位和识别大枣是否有缺陷,可以根据形状、颜色等特征进行更加精细化分级,可以让大枣分级
更加标准规范回报,机械臂4设置在ccd摄像机6的另一侧,通过机械臂4将已经检测出来的有缺陷的大枣和各个等级的大枣分别夹到相应的收集箱11里,收集箱11内设置有重量传感器12,收集箱11外设置有报警器23,当所收集的大枣的重量达到一定的值时由控制箱14控制机械臂4不在抓取,同时控制带有小型直流电机10的四个滚轮9将整个装置运送的指定的位置。
22.机械臂4的具体结构如图3所示,机械臂安装座2-4安装在可旋转立柱5上,可旋转立柱5下部设置有小型步进电机24,小型步进电机24输出轴与可旋转立柱5相连接,a级舵机2-3设置在底盘2-4内部,转臂2-2的一端连接着a级舵机2-3的输出轴,转臂2-2的另一端内部设置有b级舵机2-1,a级摆臂1-9的一端连接着b级舵机2-1的输出轴,a级摆臂1-9的另一端连接着c级舵机1-8的输出轴,b级摆臂1-7一端内部设置有c级舵机1-8,b级摆臂1-7另一端内部设置有d级舵机1-6,夹枣手安装座1-5固定安装在d级舵机1-6的输出轴上,夹枣手安装座1-5内部设置有f级舵机1-4,夹枣手1-3固定安装在f级舵机1-4的输出轴上。
23.装枣箱2的具体结构如图5所示,装枣箱2 固定在机身1上,装枣箱2中有四块溜枣板24,装枣箱2的中心有个孔用来让大枣逐个落入到传送装置上。
24.以上实施仅为说明本实用新型的技术思想,不能以此限定本实用新型的保护范围,凡是按照本实用新型提出的技术思想,在技术方案基础上所做的任何改动,均落入本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。