1.本发明属于偏瘫训练技术领域,更具体地,涉及一种偏瘫患者坐位上肢训练装置。
背景技术:
2.目前,脑血管意外已经成为人类的一大杀手,其引起的偏瘫患者数量也逐步增加。患者由于一侧偏瘫,引起身体多方面功能的障碍,特别是肢体行为能力的丧失,给患者和家人的生活带来极大的不便。偏瘫患者患侧上肢的训练对于患者的康复极为重要,上肢行为能力的恢复涉及运动觉和触觉,现有的康复训练装置无法专门针对偏瘫患者患侧上肢进行运动觉和触觉的有效训练。
技术实现要素:
3.本发明的目的是针对现有技术中存在的不足,提供一种偏瘫患者坐位上肢训练装置,该装置具有座椅和可移动的桌板,偏瘫患者可以以坐位姿态令上肢在桌板上进行运动觉和触觉的训练,第一摇臂、第二摇臂和第三摇臂连接形成与患侧手臂相配合的形态,并且可以带动患侧手臂进行运动,同时患者患侧手部能够在桌面上进行触摸、滑动等动作,进而逐步恢复患者患侧上肢的运动觉和触觉。
4.为了实现上述目的,本发明提供一种偏瘫患者坐位上肢训练装置,该装置包括:
5.底座,所述底座上设置有座椅和可移动的桌板;
6.第一摇臂,所述第一摇臂的一端可升降地连接在所述座椅的靠背的一侧,所述第一摇臂的一端能够在伺服电机的驱动下转动;
7.第二摇臂,所述第二摇臂的一端铰接在所述第一摇臂的另一端上,所述第二摇臂的另一端上设置有竖向的第一转轴;
8.第一伸缩结构,所述第一伸缩结构的两端分别连接在所述第一摇臂和所述第二摇臂的前侧;
9.第三摇臂,所述第三摇臂的一端转动套设在所述第一转轴上,所述第三摇臂的另一端上设置有手部束带;
10.第一驱动结构,能够驱动所述第三摇臂绕所述第一转轴转动。
11.可选地,所述底座上在所述座椅的前方设置有滑道,所述桌板下侧设置有支脚,所述支脚的下端与所述滑动滑动配合。
12.可选地,所述座椅的靠背上设置有躯干束带。
13.可选地,所述靠背的一侧设置有导轨,所述第一摇臂的一端设置有滑块,所述滑块套设在所述导轨上,所述导轨的一侧设置有齿条,所述滑块的内部设置有与所述齿条啮合的第一齿轮,所述滑块上设置有第一驱动电机,所述第一驱动电机的输出端与所述齿轮连接。
14.可选地,所述第一驱动结构包括:
15.第二驱动电机,固定在所述第三摇臂上;
16.第二齿轮,固定在所述第一转轴上;
17.第三齿轮,固定在所述第二驱动电机的输出端上,所述第三齿轮与所述第二齿轮啮合。
18.可选地,所述第三摇臂的一端上侧设置有肘部凹槽,所述肘部凹槽能够容纳患者的患侧肘部。
19.可选地,还包括手部外骨骼机械手,所述手部外骨骼机械手铰接在所述第三摇臂的另一端上,所述手部外骨骼机械手能够穿戴在患者的患侧手上,所述手部外骨骼机械手能够带动患者的患侧手进行抓握动作。
20.可选地,所述手部外骨骼机械手包括:
21.手背板,所述手背板的一端与所述第三摇臂的另一端铰接;
22.四个第一手指板,分别对应除拇指外的四个手指位置,所述第一手指板的一端通过第一铰接节与所述手背板的另一端铰接,所述第一手指板的另一端通过第二铰接节与第二手指板的一端铰接,所述第二手指板的另一端通过第三铰接节与第三手指板的一端铰接,所述第一铰接节、所述第二铰接节和所述第三铰接节的上侧分别设置有第一伸缩杆、第二伸缩杆和第三伸缩杆,所述第一伸缩杆、所述第二伸缩杆和所述第三伸缩杆分别驱动所述第一铰接节、所述第二铰接节和所述第三铰接节转动;
23.一个第四手指板,对应拇指的位置,所述第四手指板的一端通过第四铰接节与所述手背板铰接,所述第四手指板的另一端通过第五铰接节与第五手指板铰接,所述第四铰接节和所述第五铰接节的上侧分别设置有第四伸缩杆和第五伸缩杆,所述第四伸缩杆和所述第五伸缩杆分别驱动所述第四铰接节和所述第五铰接节转动;
24.所述第二铰接节、所述第三铰接节和所述第五铰接节的下侧设置有手指束带。
25.可选地,还包括u形支架,所述u形支架的一端连接在所述第三摇臂的上侧,所述u形支架的另一端通过第二伸缩结构连接在所述手背板的上侧。
26.可选地,还包括训练道具,所述训练道具设置在所述桌面上,所述训练道具包括切割刀具、被切割物品、盛放容器和抹布。
27.本发明提供一种偏瘫患者坐位上肢训练装置,其有益效果在于:
28.1、该装置具有座椅和可移动的桌板,偏瘫患者可以以坐位姿态令上肢在桌板上进行运动觉和触觉的训练,第一摇臂、第二摇臂和第三摇臂连接形成与患侧手臂相配合的形态,并且可以带动患侧手臂进行运动,同时患者患侧手部能够在桌面上进行触摸、滑动等动作,进而逐步恢复患者患侧上肢的运动觉和触觉;
29.2、该装置还具有手部外骨骼机械手,能够带动患者的患侧手进行抓握动作训练,能够抓握放置在桌板上的物品,实现患侧手部的抓握康复训练;
30.3、该装置通过u形支架和第二伸缩结构与第三摇臂和手部外骨骼机械手的配合,能够实现患侧手部抓握后的抬腕动作,模拟切东西的动作,进一步对患侧上肢进行针对性训练,并且与训练道具配合使用,提高训练乐趣,克服患者心理上对康复训练的抵抗,克服心理障碍,有利于患者的康复。
31.本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
32.通过结合附图对本发明示例性实施方式进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显,其中,在本发明示例性实施方式中,相同的参考标号通常代表相同部件。
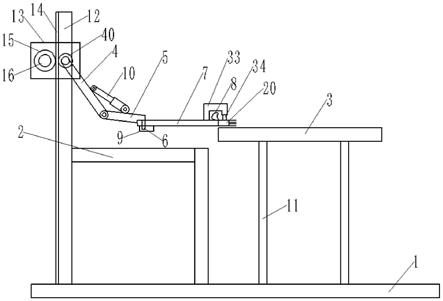
33.图1示出了根据本发明的一个实施例的一种偏瘫患者坐位上肢训练装置的结构示意图。
34.图2示出了根据本发明的一个实施例的一种偏瘫患者坐位上肢训练装置的第一驱动结构的示意图。
35.图3示出了根据本发明的一个实施例的一种偏瘫患者坐位上肢训练装置的手部外骨骼机械手的结构示意图。
36.附图标记说明:
37.1、底座;2、座椅;3、桌板;4、第一摇臂;5、第二摇臂;6、第一转轴;7、第三摇臂;8、手部束带;9、第一驱动结构;10、第一伸缩结构;11、支脚、12、导轨;13、滑块;14、齿条;15、第一齿轮;16、第一驱动电机;17、第二驱动电机;18、第二齿轮;19、第三齿轮;20、手部外骨骼机械手;21、手背板;22、第一手指板;23、第一铰接节;24、第二铰接节;25、第二手指板;26、第三铰接节;27、第三手指板;28、第四手指板;29、第四铰接节;30、第五铰接节;31、第五手指板;32、手指束带;33、u形支架;34、第二伸缩结构;35、第一伸缩杆;36、第二伸缩杆;37、第三伸缩杆;38、第四伸缩杆;39、第五伸缩杆;40、伺服电机。
具体实施方式
38.下面将更详细地描述本发明的优选实施方式。虽然以下描述了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
39.本发明提供一种偏瘫患者坐位上肢训练装置,该装置包括:
40.底座,底座上设置有座椅和可移动的桌板;
41.第一摇臂,第一摇臂的一端可升降地连接在座椅的靠背的一侧,第一摇臂的一端能够在伺服电机的驱动下转动;
42.第二摇臂,第二摇臂的一端铰接在第一摇臂的另一端上,第二摇臂的另一端上设置有竖向的第一转轴;
43.第一伸缩结构,第一伸缩结构的两端分别连接在第一摇臂和第二摇臂的前侧;
44.第三摇臂,第三摇臂的一端转动套设在第一转轴上,第三摇臂的另一端上设置有手部束带;
45.第一驱动结构,能够驱动第三摇臂绕第一转轴转动。
46.具体的,患者可以坐在座椅上,通过健侧手拉动可移动的桌板,调节桌板的位置;第一摇臂可以沿座椅的靠背竖向升降,并可以在伺服电机的带动下绕其一端转动,第二摇臂与第一摇臂的另一端铰接,可以在竖直平面内转动,在第一伸缩结构的伸缩作用下,可以实现患侧前臂的抬起放下动作,在第一摇臂绕其一端转动并配合第一伸缩结构伸缩的作用下,患者的患侧手臂可以在桌板上侧进行前伸和收回动作,使得患者的患侧手在桌板上抚
摸,同时训练患者的运动觉和触觉,并且第三摇臂能够在第一驱动结构的驱动下绕第一转轴转动,带动患者前臂绕肘部圆弧形运动,能够模拟擦桌版的动作;并且随着第一摇臂的一端的升降,还可以带动患者患侧手臂抬起吗,抬起后也可以执行上述训练动作。
47.可选地,底座上在座椅的前方设置有滑道,桌板下侧设置有支脚,支脚的下端与滑动滑动配合。
48.具体的,滑动可以为滑槽,支脚的下端滑动卡接在滑槽内。
49.可选地,座椅的靠背上设置有躯干束带。
50.具体的,躯干束带能够将患者躯干部位很好地固定在座椅的靠背上,避免患者倾倒。
51.可选地,靠背的一侧设置有导轨,第一摇臂的一端设置有滑块,滑块套设在导轨上,导轨的一侧设置有齿条,滑块的内部设置有与齿条啮合的第一齿轮,滑块上设置有第一驱动电机,第一驱动电机的输出端与齿轮连接。
52.具体的,第一驱动单机能够驱动第一齿轮转动,在第一齿轮与齿条的啮合作用下,滑块沿导轨上下移动。
53.可选地,第一驱动结构包括:
54.第二驱动电机,固定在第三摇臂上;
55.第二齿轮,固定在第一转轴上;
56.第三齿轮,固定在第二驱动电机的输出端上,第三齿轮与第二齿轮啮合。
57.具体的,第二驱动电机带动第三齿轮转动,通过第三齿轮与固定在第一转轴上的第二齿轮的啮合,使得第三摇臂绕第一转轴转动。
58.可选地,第三摇臂的一端上侧设置有肘部凹槽,肘部凹槽能够容纳患者的患侧肘部。
59.具体的,患者的患侧肘部可以嵌设在肘部凹槽内,对患侧手臂起到进一步的固定作用,保证第一摇臂、第二摇臂、第三摇臂能够稳定有效地带动患者患侧上肢进行运动。
60.可选地,还包括手部外骨骼机械手,手部外骨骼机械手铰接在第三摇臂的另一端上,手部外骨骼机械手能够穿戴在患者的患侧手上,手部外骨骼机械手能够带动患者的患侧手进行抓握动作。
61.具体的,通过为患者的患侧手部穿戴手部外骨骼机械手,带动患者的患侧手部进行抓握动作。
62.可选地,手部外骨骼机械手包括:
63.手背板,手背板的一端与第三摇臂的另一端铰接;
64.四个第一手指板,分别对应除拇指外的四个手指位置,第一手指板的一端通过第一铰接节与手背板的另一端铰接,第一手指板的另一端通过第二铰接节与第二手指板的一端铰接,第二手指板的另一端通过第三铰接节与第三手指板的一端铰接,第一铰接节、第二铰接节和第三铰接节的上侧分别设置有第一伸缩杆、第二伸缩杆和第三伸缩杆,第一伸缩杆、第二伸缩杆和第三伸缩杆分别驱动第一铰接节、第二铰接节和第三铰接节转动;
65.一个第四手指板,对应拇指的位置,第四手指板的一端通过第四铰接节与手背板铰接,第四手指板的另一端通过第五铰接节与第五手指板铰接,第四铰接节和第五铰接节的上侧分别设置有第四伸缩杆和第五伸缩杆,第四伸缩杆和第五伸缩杆分别驱动第四铰接
节和第五铰接节转动;
66.第二铰接节、第三铰接节和第五铰接节的下侧设置有手指束带。
67.具体的,每个铰接节均由伸缩杆进行驱动,驱动铰接节的转动,在手指束带的配合作用下,实现患者手指上各个关节的屈伸,进而带动患者的患侧手部进行抓握的打开动作;该手部外骨骼机械手结构简单,成本低廉,相比于现有的结构复杂成本高昂的外骨骼机械手更适合于偏瘫训练装置使用。
68.可选地,还包括u形支架,u形支架的一端连接在第三摇臂的上侧,u形支架的另一端通过第二伸缩结构连接在手背板的上侧。
69.具体的,在第二伸缩结构的伸缩作用下,手背板能够上下抬起和放下,能够带动患侧手腕部进行抬腕和放下动作。
70.可选地,还包括训练道具,训练道具设置在桌面上,训练道具包括切割刀具、被切割物品、盛放容器和抹布。
71.具体的,通过设置训练道具,配合上述第一摇臂、第二摇臂、第三摇臂、手部外骨骼机械手等机构,能够训练患者患侧上肢切割物品的动作,训练更加接近生活、更加真实有效,患者在训练过程中能够体验训练的乐趣和成功的喜悦。
72.实施例
73.如图1至图3所示,本发明提供一种偏瘫患者坐位上肢训练装置,该装置包括:
74.底座1,底座1上设置有座椅2和可移动的桌板3;
75.第一摇臂4,第一摇臂4的一端可升降地连接在座椅2的靠背的一侧,第一摇臂4的一端能够在伺服电机40的驱动下转动;
76.第二摇臂5,第二摇臂5的一端铰接在第一摇臂4的另一端上,第二摇臂5的另一端上设置有竖向的第一转轴6;
77.第一伸缩结构10,第一伸缩结构10的两端分别连接在第一摇臂4和第二摇臂5的前侧;
78.第三摇臂7,第三摇臂7的一端转动套设在第一转轴6上,第三摇臂7的另一端上设置有手部束带8;
79.第一驱动结构9,能够驱动第三摇臂7绕第一转轴6转动。
80.在本实施例中,底座1上在座椅2的前方设置有滑道,桌板3下侧设置有支脚11,支脚11的下端与滑动滑动配合。
81.在本实施例中,座椅2的靠背上设置有躯干束带。
82.在本实施例中,靠背的一侧设置有导轨12,第一摇臂4的一端设置有滑块13,滑块13套设在导轨12上,导轨12的一侧设置有齿条14,滑块13的内部设置有与齿条14啮合的第一齿轮15,滑块13上设置有第一驱动电机16,第一驱动电机16的输出端与齿轮连接。
83.在本实施例中,第一驱动结构9包括:
84.第二驱动电机17,固定在第三摇臂7上;
85.第二齿轮18,固定在第一转轴6上;
86.第三齿轮19,固定在第二驱动电机17的输出端上,第三齿轮19与第二齿轮18啮合。
87.在本实施例中,第三摇臂7的一端上侧设置有肘部凹槽,肘部凹槽能够容纳患者的患侧肘部。
88.在本实施例中,还包括手部外骨骼机械手20,手部外骨骼机械手20铰接在第三摇臂7的另一端上,手部外骨骼机械手20能够穿戴在患者的患侧手上,手部外骨骼机械手20能够带动患者的患侧手进行抓握动作。
89.在本实施例中,手部外骨骼机械手20包括:
90.手背板21,手背板21的一端与第三摇臂7的另一端铰接;
91.四个第一手指板22,分别对应除拇指外的四个手指位置,第一手指板22的一端通过第一铰接节23与手背板21的另一端铰接,第一手指板22的另一端通过第二铰接节24与第二手指板25的一端铰接,第二手指板25的另一端通过第三铰接节26与第三手指板27的一端铰接,第一铰接节23、第二铰接节24和第三铰接节26的上侧分别设置有第一伸缩杆35、第二伸缩杆36和第三伸缩杆37,第一伸缩杆35、第二伸缩杆36和第三伸缩杆37分别驱动第一铰接节23、第二铰接节24和第三铰接节26转动;
92.一个第四手指板28,对应拇指的位置,第四手指板28的一端通过第四铰接节29与手背板21铰接,第四手指板28的另一端通过第五铰接节30与第五手指板31铰接,第四铰接节29和第五铰接节30的上侧分别设置有第四伸缩杆38和第五伸缩杆39,第四伸缩杆38和第五伸缩杆39分别驱动第四铰接节29和第五铰接节30转动;
93.第二铰接节24、第三铰接节26和第五铰接节30的下侧设置有手指束带32。
94.在本实施例中,还包括u形支架33,u形支架33的一端连接在第三摇臂7的上侧,u形支架33的另一端通过第二伸缩结构34连接在手背板21的上侧。
95.在本实施例中,还包括训练道具,训练道具设置在桌面上,训练道具包括切割刀具、被切割物品、盛放容器和抹布。
96.综上,本发明提供的偏瘫患者坐位上肢训练装置使用时,患者呈坐位姿态由躯干束带固定在座椅2上,避免倾倒;将训练道具:一个黄瓜、一把小刀、一只碗和一块抹布放置在桌面上;患者坐好后,患侧手部由手部束带8固定在第三摇臂7上,同时患者的患侧肘部嵌入肘部凹槽内,此时患者的患侧手臂可以在第一摇臂4、第二摇臂5、第三摇臂7的带动下进行运动,患者可以用健侧手把桌面向自己拉近,直到患者的胸部与桌面一侧接触,此时在第一摇臂4沿导轨12的升降作用、第二摇臂5在第一伸缩结构10的调整作用和第三摇臂7的带动下患者的患侧手能够与健侧手一样放置在桌面上。通过第一伸缩结构10的伸缩动作配合伺服电机的转动,能够使得患者的患侧手在桌面上前后移动,模拟测试桌板3稳定程度的动作。然后,通过第一驱动结构9带动第三摇臂7转动,使得患者的患侧前臂绕肘部转动,患者的患侧手在桌面上呈圆弧形划过,抚摸桌面,形成患者患侧上肢运动觉和触觉同时的康复训练。之后,再通过第一齿轮15与齿条14的配合,使得第一摇臂4的一端上升,通过第三摇臂7将患者患侧肘部和前臂抬起,在抬起状态下还可以通过第三摇臂7绕第一转轴6的转动带动患者的前臂挥动,进行患侧上肢的活动训练。活动训练后,患者的健侧手可以取过来桌面上的黄瓜和小刀,此时将患侧手通过手指束带32固定在手部外骨骼机械手20上,通过第一摇臂4、第二摇臂5、第三摇臂7和手部外骨骼机械手20的带动,使得患者的患侧手将小刀的刀柄抓握住,再通过第二伸缩结构34的伸缩作用,使得患者患侧进行抬腕动作,在健侧手移动黄瓜的配合下,患者患侧手持刀进行切黄瓜动作,将黄瓜切成片状,并由健侧手捡至碗中,之后患者还可以利用健侧手将碗中的黄瓜送至自己或家人口中;在此过程中,患者能够充分感受训练乐趣和训练成果的喜悦,在不断的训练中促进患者上肢的运动觉和触觉的恢
复。最后,还可以在手部外骨骼机械手20的带动下使患者用患侧手抓起抹布,通过第三摇臂7绕第一转轴6的转动进行患侧上肢抓住抹布擦桌板3的动作。
97.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
