1.本发明涉及救援设备技术领域,特别涉及一种用于救援机器人的变刚度执行装置。
背景技术:
2.目前技术较为成熟且投入应用的救援后送机器人,大多可以完成物资搬运、人员转移和设备安置等任务,具备了一定的载运和操作能力,如日本横滨警察署研发设计的“爬行者”crawler救援机器人以及日本东京消防厅使用的robocue救援机器人等。救援后送机器人的主要挑战是将被困伤员救起并转移至安全区域,在救援作业过程中,不可避免的要与人体直接接触,机构的柔性与刚性与对人体的包覆性对人体都会产生影响,机械结构和传感装置及机器人控制相对复杂,救援执行机构作为后送救援机器人的关键部分,其性能对救援机器人整体作业性能有决定性影响。
3.目前公开号为cn104944280a的发明专利公开了一种救援机械手,具有夹持灵活,夹持效率高,被夹持物不会脱落和运行可靠等优点,但各组件均为刚性材料制成,无法与人体形态相适应,在抬起人体过程中无法实现人体结构自适应的柔性接触与全方位包覆,驱动方式为液压驱动,因此难以保证救援过程的安全性,液压驱动力过大可能对被救援对象造成二次伤害。
4.公开号为cn107891919a的发明专利公开了一种气压软轴联合驱动的软体救援机器人,采用气压驱动的方式实现对软体管道弯曲,避过障碍进入废墟内部,有效的避免了在工作过程中对被困人员或易倒塌废墟内部的碰撞,但是用柔性材料制成的软体机器人且刚性承载结构较少,其承载能力有限,无法完成将被救援对象转移等大负载救援作业。
5.公开号为cn113415357a的发明专利公开了一种多功能救援后送机器人,实现无人工参与下伤员的救助后送工作,自动化程度高,但此时需要伤员能够站立自行爬上机器人,然后由机器人将伤员运出,但此种情况仅仅适用于伤员未伤及腿部,可以站立行走的情况,对于伤员不能直立行走的情况则不能采用此方式。
技术实现要素:
6.针对现有技术存在的问题,本发明提供一种用于救援机器人的变刚度执行装置,通过平衡挡板内两端对称的钢丝绳拉动层干扰串联链条组件中层干扰串联链条和层干扰限位链条的变形,使层干扰串联链条组件能够适应物体形状并将其完全包覆,并能够适时改变自身刚度实现自锁从而固定物体的位姿,从而实现对物体的柔性接触、刚性承载,全方位保证物体的安全。
7.本发明提供了一种用于救援机器人的变刚度执行装置,其包括构架平台组件、平动机械臂组件和层干扰串联链条组件,所述平动机械臂组件和所述层干扰串联链条组件分别对称分布在所述构架平台组件的两侧,所述层干扰串联链条组件的第一端和所述构架平台组件中平衡挡板连接,所述层干扰串联链条组件的第二端和所述平动机械臂组件中链条
末端构件的第二端连接。所述构架平台组件,其包括型材架、平衡挡板和升降伸缩杆,所述平衡挡板的内部设有定滑轮,第一钢丝绳位于所述平衡挡板内部的外端,所述第一钢丝绳的第一端和第一气缸的输出端连接,所述第一钢丝绳的第二端依次穿过第一通孔和第二通孔与所述层干扰串联链条组件中层干扰限位链条连接,第二钢丝绳位于所述平衡挡板内部的中间,所述第二钢丝绳的第一端和第二气缸的输出端连接,所述第二钢丝绳的第二端穿过第一通孔和所述层干扰串联链条组件中层干扰串联链条连接。所述平动机械臂组件,其包括第一电推杆、连杆组件、链条收纳盒和滚轮,所述连杆组件中第一转杆的第一端和所述第一电推杆的输出端连接,所述连杆组件中摇杆的第一端和所述链条收纳盒的外壳连接,所述第一电推杆的外壳和所述连杆组件中第二固定杆的中部固定连接,所述链条收纳盒下端的内部设有第二电推杆和链条末端构件,所述第二电推杆的输出端通过链条末端构件和所述层干扰限位链条的安装端连接,所述链条收纳盒下端的外部对称设有滚轮。所述层干扰串联链条组件,其包括气缸、层干扰串联链条和层干扰限位链条,所述气缸的外壳和所述连接板上部的安装端固定连接,所述层干扰串联链条的安装端和所述平衡挡板的第二安装端连接,所述层干扰串联链条的插板和所述层干扰限位链条的限位槽口连接;所述层干扰串联链条,其包括层干扰链条链节和固定扣帽,相邻两个层干扰链条链节通过固定扣帽固定连接,第一个层干扰链条链节的插板穿过第二个层干扰链条链节的槽口和固定扣帽的凹槽连接;所述层干扰限位链条,其包括层干扰限位链节和辊筒,相邻两个层干扰限位链节通过第三个层干扰限位链节连接,第一个层干扰限位链节的插片和所述第二个层干扰限位链节的限位槽口连接,所述第三个层干扰限位链节的插片和第一个层干扰限位链节的限位槽口连接。
8.可优选的是,在所述构架平台组件中,所述升降伸缩杆中一级伸缩杆的第一安装端和所述型材架中部的下端固定连接,所述升降伸缩杆中一级伸缩杆的第二安装端通过电动丝杠和所述升降伸缩杆中二级伸缩杆的第一安装端固定连接,所述升降伸缩杆中二级伸缩杆的第二安装端和所述连接板上部的中心固定连接,所述连接板的下部和所述平衡挡板的第一安装端连接。
9.可优选的是,所述连杆组件,其包括第一转杆、摇杆、第一固定杆、第二固定杆、执行连杆和第三固定杆,所述第一转杆的第二端和所述链条收纳盒外部的第一固定端固定连接,所述摇杆的第一安装端和所述链条收纳盒外部的第二固定端固定连接,所述第一固定杆的两端分别与所述第二固定杆和所述第三固定杆的第一安装端连接,所述第二固定杆和所述第三固定杆的第二安装端分别与所述型材架的第一安装端和第二安装端固定连接,所述执行连杆的两端分别与所述第一固定杆的第三安装端和所述摇杆的第二安装端连接。
10.可优选的是,在所述层干扰串联链条中,所述层干扰链条链节的中部设有第一通孔,所述层干扰链条链节的第一侧面和第二侧面分别设有槽口和插板;在所述层干扰限位链条中,所述层干扰限位链节的中部和两端均设有第二通孔,所述层干扰限位链节的第一侧面和第二侧面分别设有限位槽口和插片,所述辊筒的两端分别与所述层干扰限位链节的辊筒轴孔固定连接。
11.可优选的是,所述型材架的外形为矩形结构,所述型材架沿着长度方向设有多根横梁,所述平衡挡板上端的外表面为平面,下端的外表面为弧状,所述一级伸缩杆、所述电动丝杠和所述二级伸缩杆的轴线在同一条直线上。
12.可优选的是,所述第一钢丝绳对称分布在所述第二钢丝绳的两侧,所述第一钢丝绳和所述第二钢丝绳对称分布在所述平衡挡板的两端,所述第一钢丝绳的数量是所述第二钢丝绳数量的二倍。
13.可优选的是,所述层干扰链条链节的槽口为圆弧状,所述槽口的弧长大于所述插板的弧长,所述插板在所述槽口中沿圆弧滑动,从而使所述层干扰串联链条之间可实现一定角度的相对转动。
14.可优选的是,所述层干扰限位链节的限位槽口为圆弧状,所述限位槽口的弧长大于所述插片的弧长,所述插片在限位槽口中单侧转动,防止辊筒产生干涉转动方向和层干扰限位链条跑偏,所述辊筒的轴线和所述层干扰限位链节的辊筒轴孔的轴线在同一条直线上。
15.可优选的是,所述层干扰串联链条组件的数量和所述平动机械臂组件的数量相等,在所述层干扰串联链条组件中,相邻两个层干扰链条链节的轴线互相平行,相邻两个辊筒的轴线互相平行;所述层干扰链条链节和所述固定扣帽组成第一链条,所述层干扰限位链节和辊筒组成第二链条。
16.本发明与现有技术相比,具有如下优点:
17.1.本发明能够减少对物体的二次伤害,在托抱物体时实现层干扰串联链条与物体形状自适应,适时变刚度,从而在包覆物体时能够适应物体形状,基于层干扰原理适时变刚度防止挤压物体,实现对物体的柔性接触、刚性承载,全方位保证物体的安全。
18.2.本发明具备固定物体的功能,在完成物体托抱之后能够适时改变自身刚度实现自锁从而固定物体的位姿。
19.3.本发明具备较高的承载能力,设计的多臂协同工作,不但分散搬运物体的重力,而且根据层干扰原理进行变刚度,提高整个装置的承重能力和变形能力。
附图说明
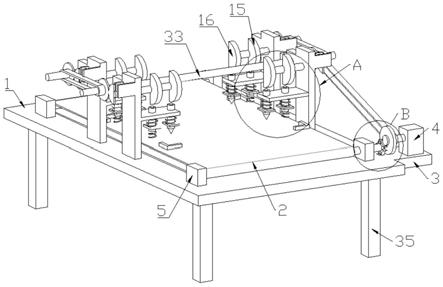
20.图1为本发明用于救援机器人的变刚度执行装置的整体结构图;
21.图2为本发明用于救援机器人的变刚度执行装置的局部结构图;
22.图3为本发明用于救援机器人的变刚度执行装置中升降伸缩杆和平衡挡板的结构图;
23.图4为本发明用于救援机器人的变刚度执行装置中平动机械臂组件的结构图;
24.图5为本发明用于救援机器人的变刚度执行装置中层干扰串联链条组件的结构图;
25.图6为本发明用于救援机器人的变刚度执行装置中层干扰串联链条的结构图;
26.图7为本发明用于救援机器人的变刚度执行装置中层干扰串联链条的局部爆炸图;
27.图8为本发明用于救援机器人的变刚度执行装置中层干扰串联链条的结构图;
28.图9为本发明用于救援机器人的变刚度执行装置中层干扰限位链条的结构图;
29.图10为本发明用于救援机器人的变刚度执行装置中链条收纳盒的内部结构图;
30.图11为本发明用于救援机器人的变刚度执行装置中平衡挡板的滑轮和钢丝绳排布图。
31.主要附图标记:
32.构架平台组件1,型材架11,平衡挡板12,定滑轮121,第一钢丝绳122,第二钢丝绳123,升降伸缩杆13,一级伸缩杆131,电动丝杠132,二级伸缩杆133,连接板134,平动机械臂组件2,第一电推杆21,连杆组件22,第一转杆221,摇杆222,第一固定杆223,第二固定杆224,执行连杆225,第三固定杆226,链条收纳盒23,第二电推杆231,链条末端构件232,滚轮24,层干扰串联链条组件3,第一气缸31,层干扰串联链条32,第一个层干扰链条链节321,槽口3211,插板3212,第一通孔3213,固定扣帽322,第二个层干扰链条链节323,层干扰限位链条33,第一个层干扰限位链节331,限位槽口3311,插片3312,第二通孔3313,辊筒轴孔3314,辊筒332,第二个层干扰限位链节333,第三个层干扰限位链节334,第二气缸34。
具体实施方式
33.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
34.用于救援机器人的变刚度执行装置,可以实现适时变刚度全方位包覆物体,实现对物体的柔性接触、刚性承载,避免对物体的二次伤害,具体结构如图1和图2所示,包括构架平台组件1、平动机械臂组件2和层干扰串联链条组件3,平动机械臂组件2和层干扰串联链条组件3均设有柔性包覆层;平动机械臂组件2和层干扰串联链条组件3分别对称分布在构架平台组件1的两侧,层干扰串联链条组件3的第一端和构架平台组件1中平衡挡板12连接,层干扰串联链条组件3的第二端和平动机械臂组件2中链条末端构件232的第二端连接。
35.构架平台组件1,如图3和图11所示,包括型材架11、平衡挡板12和升降伸缩杆13,升降伸缩杆13内部设置电驱动丝杠,电驱动丝杠控制升降伸缩杆13的伸缩行为。升降伸缩杆13中一级伸缩杆131的第一安装端和型材架11中部的下端固定连接,升降伸缩杆13中一级伸缩杆131的第二安装端通过电动丝杠132和升降伸缩杆13中二级伸缩杆133的第一安装端固定连接,升降伸缩杆13中二级伸缩杆133的第二安装端和连接板134上部的中心固定连接,连接板134的下部和平衡挡板12的第一安装端连接,升降伸缩杆13带动平衡挡板12实现升降运动。
36.具体而言,型材架11的外形为矩形结构,型材架11沿着长度方向设有多根横梁,用于机械臂安装,中部部分铝型材用于固定第一电推杆21和升降伸缩杆13;平衡挡板12的内部为中空,上端的外表面为平面,下端的外表面为弧状,目的为更好贴合物体上方的轮廓,平衡挡板12上设置开孔,钢丝绳从开孔中穿过;一级伸缩杆131、电动丝杠132和二级伸缩杆133的轴线在同一条直线上。
37.如图11所示,平衡挡板12的内部设有定滑轮121,用于两侧第一钢丝绳122和第二钢丝绳123在平衡挡板12内部有序排列与优化布置,第一钢丝绳122的第一端位于平衡挡板12内部的外端,第一钢丝绳122的第一端和第一气缸31的输出端连接,第一钢丝绳122的第二端依次穿过第一通孔3213和第二通孔3313与层干扰串联链条组件3中层干扰限位链条33连接,第一钢丝绳122的第二端位于层干扰串联链条组件3中层干扰限位链条33的内部,用于整体变刚度,第二钢丝绳123的第一端位于平衡挡板12内部的中间,第二钢丝绳123的第一端和第二气缸34的输出端连接,第二钢丝绳123的第二端穿过第一通孔3213与层干扰串联链条组件3中层干扰串联链条32连接,第二钢丝绳123的第二端位于层干扰串联链条组件
3中层干扰串联链条32的内部,用于局部变刚度。
38.具体而言,第二气缸34拉动第二钢丝绳123,层干扰链条链节每一链节相互挤压并产生较大相对滑动摩擦力,可实现层干扰串联链条32的变刚度;第一气缸31拉动第一钢丝绳122,层干扰链条链节的每一节与层干扰限位链节的每一节均相互挤压并产生较大相对滑动摩擦力,可实现层干扰串联链条32与层干扰限位链条33两段链条整体的变刚度;辊筒332间隔设置在层干扰限位链条33的中部,在托抱过程中与地面相对滚动减小摩擦力。
39.优选地,第一钢丝绳122对称分布在第二钢丝绳123的两侧,第一钢丝绳122和第二钢丝绳123对称分布在平衡挡板12的两端,第一钢丝绳122的数量是第二钢丝绳数量123的二倍。
40.平动机械臂组件2,如图4所示,包括第一电推杆21、连杆组件22、链条收纳盒23和滚轮24,连杆组件22中第一转杆221的第一端和第一电推杆21的输出端连接,连杆组件22中摇杆222的第一端和链条收纳盒23的外壳连接,第一电推杆21的外壳和连杆组件22中第二固定杆224的中部固定连接,连杆组件22,其包括第一转杆221、摇杆222、第一固定杆223、第二固定杆224、执行连杆225和第三固定杆226,第一转杆221的第二端和链条收纳盒23外部的第一固定端固定连接,摇杆222的第一安装端和链条收纳盒23外部的第二固定端固定连接,第一固定杆223的两端分别与第二固定杆224和第三固定杆226的第一安装端连接,第二固定杆224和第三固定杆226的第二安装端分别与型材架11的第一安装端和第二安装端固定连接,执行连杆225的两端分别与第一固定杆223的第三安装端和摇杆222的第二安装端连接。
41.进一步地,第一电推杆21驱动一转杆221,一转杆221带动摇杆222,摇杆222末端沿着近似直线的往复运动,摇杆222末端安装滚轮24,机械臂平动合拢过程中滚轮24可以实现与地面的相对滚动。
42.如图10所示,链条收纳盒23内部为中空,链条收纳盒23下端的内部设有第二电推杆231和链条末端构件232,内部设置第二电推杆231,第二电推杆231的输出端通过链条末端构件232和层干扰限位链条33的安装端连接,第二电推杆231拉伸链条末端构件232对层干扰串联链条组件3进行收纳和释放,链条收纳盒23下端的外部对称设有滚轮24,滚轮24在第一电推杆21的线性驱动下实现直线往复移动,由此实现链条对物体的包覆过程。
43.层干扰串联链条组件3,如图5并结合图6和图7所示,包括第一气缸31、第二气缸34、层干扰串联链条32和层干扰限位链条33,层干扰串联链条32和层干扰限位链条33两段链条通过插板插入槽口的方式串联连接,第一气缸31和第二气缸34的外壳分别与连接板134上部的第一安装端和第二安装端固定连接,气缸与外部气泵通过气管连接,层干扰串联链条32的安装端和平衡挡板12的第二安装端连接,层干扰串联链条32的插板3212和层干扰限位链条33的限位槽口3311连接。
44.具体而言,链条包覆物体局部,气缸驱动拉紧钢丝绳,钢丝绳拉紧链条实现层干扰串联链条32局部由柔到刚,实现支撑物体的功能,在托起物体过程中可以防止挤压物体,当完全包覆物体后,气缸驱动整体钢丝绳,实现整体变刚度,从而实现固定物体。
45.层干扰串联链条32由多节层干扰链条链节串联连接组成,接触物体两侧后可仿形物体,实现贴附物体轮廓的效果,如图8所示,具体包括层干扰链条链节和固定扣帽322,相邻两个层干扰链条链节通过固定扣帽322固定连接,固定扣帽322将层干扰链条链节在一定
角度范围相对转动,层干扰链条链节的中部设有第一通孔3213,层干扰链条链节的第一侧面和第二侧面分别设有槽口3211和插板3212,第一个层干扰链条链节321的插板3212穿过第二个层干扰链条链节323的槽口3211和固定扣帽322的凹槽连接,固定扣帽322将链节层干扰链条链节锁住。
46.优选地,层干扰链条链节的槽口为圆弧状,槽口3211的弧长大于插板3212的弧长,插板3212在槽口3211中沿圆弧滑动,从而使层干扰串联链条32之间可实现一定角度的相对转动。
47.层干扰限位链条33由多节辊筒332串联组成,如图9所示,具体包括层干扰限位链节和辊筒332,辊筒332的外表面使用软材质包覆以增大摩擦与柔性,层干扰限位链节的中部和两端均设有第二通孔3313,层干扰限位链节的第一侧面和第二侧面分别设有限位槽口3311和插片3312,辊筒332的两端分别与层干扰限位链节的辊筒轴孔3314固定连接,相邻两个层干扰限位链节通过第三个层干扰限位链节334连接,第一个层干扰限位链节331的插片3312和第二个层干扰限位链节333的限位槽口3311连接,第三个层干扰限位链节334的插片3312和第一个层干扰限位链节331的限位槽口3311连接。
48.层干扰限位链节设置转动角度范围限制层干扰限位链条33的转动方向,实现单方向转动,避免层干扰限位链条33链条相互干涉,具体而言,层干扰限位链节的限位槽口3311为圆弧状,限位槽口3311的弧长大于插片3312的弧长,插片3312在限位槽口3311中单侧转动,防止辊筒332产生干涉转动方向和层干扰限位链条33跑偏,辊筒332的轴线和层干扰限位链节的辊筒轴孔3314的轴线在同一条直线上。
49.层干扰串联链条组件3的数量和平动机械臂组件2的数量相等,在层干扰串联链条组件3中,相邻两个层干扰链条链节的轴线互相平行,相邻两个辊筒332的轴线互相平行;层干扰链条链节和固定扣帽322组成第一链条,层干扰限位链节和辊筒332组成第二链条。
50.以下结合实施例对本发明一种用于救援机器人的变刚度执行装置做进一步描述:
51.本发明装置的具体工作过程如下:
52.首先,将本发明安装在救援车上,当安装有该执行装置的救援车到达被执行物体上方时,执行装置开始整体向下平移,此时平动机械臂组件2底部的滚轮24接触地面后,执行装置整体停止下移,接着升降伸缩杆13中的电动丝杠132驱动一级伸缩杆131运动,带动与连接板134下部连接的平衡挡板12向下平移,平衡挡板12刚接触到被执行物体时停止平移。
53.接着平动机械臂组件2中链条收纳盒23内的第二电推杆231驱动链条末端构件232运动,将与链条末端构件232连接的层干扰串联链条组件3从链条收纳盒23中开始逐渐释放,与此同时,第一电推杆21伸长驱动平动机械臂2水平移动,带动滚轮24和辊筒332在地面向机构中部内侧开始滚动,层干扰串联链条32将被执行物体两侧包裹,在包裹过程中层干扰串联链条组件3能够适应物体形状达到仿形的效果。
54.然后在第一电推杆21的推动下,将被执行物体两侧包裹之后,第一电推杆21停止伸长,与此同时,第二气缸34启动并拉紧第二钢丝绳123,第二钢丝绳123的第二端穿过第一通孔3213在第二气缸34的作用下,带动层干扰串联链条组件3中层干扰串联链条32运动,层干扰链节321的每一链节相互挤压并产生较大相对滑动摩擦力,可实现层干扰串联链条32由柔性变为刚性,从而实现刚性承托被执行物体,并防止再次挤压被执行物体。
55.接着再次启动第一电推杆21,层干扰限位链条33继续向执行装置中部内侧合拢,在合拢过程中,层干扰限位链条33只能实现单侧转向,防止其跑偏,同时变为刚性的层干扰串联链条32被层干扰限位链条33托起,同时将被层干扰串联链条32包裹的被执行物体托起,层干扰限位链条33继续向内侧移动,并将被执行物体全方位包裹。
56.在将被执行物体全方位包裹后,关闭第一电推杆21使其停止工作,与此同时,第一气缸31开始启动并拉动第一钢丝绳122,层干扰链条链节的每一节与层干扰限位链节的每一节均相互挤压并产生较大相对滑动摩擦力,实现层干扰串联链条32与层干扰限位链条33两段链条整体变为刚性。
57.最后被执行物体被本发明的执行装置全方位和刚性包裹,此时执行装置托抱被执行物体整体上升,配合救援车进行安全和稳固转移。其中,平衡挡板12、层干扰串联链条32和层干扰限位链条33外部均包裹高摩擦系数和高柔性的材质,在层干扰串联链条组件3包裹过程中可以保护被执行物体;层干扰串联链条32与层干扰限位链条33中的每一链节间接触面经过特殊处理,能够在拉紧钢丝绳达到一定的变刚度要求。
58.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。