1.本发明涉及预期功能安全领域,具体涉及一种自动驾驶预期功能安全感知性能局限修改方法及车辆。
背景技术:
2.现如今,自动驾驶正朝着更高等级的驾驶辅助系统发展,为了满足道路车辆安全性,传统功能安全标准iso 26262已无法覆盖分析由性能限制而引发事故的驾驶场景,新功能安全标准iso 21448予以补充,弥补iso 26262中无法覆盖的部分,iso 21448将sotif(safety of the intended functionality,预期功能安全)定义为由预期功能规范设计不足或性能局限或认为的合理可预见的误用所引起的危害。
3.感知模块是自动驾驶汽车的“眼睛”,传感器又受外界环境影响大,一旦出现问题,自动驾驶汽车必然会失去控制。如何对自动驾驶汽车感知模块的性能局限进行功能修改,并保证其有效性是十分重要的,否则将会对自动驾驶车辆造成严重的安全隐患。
4.一般的自动驾驶汽车的传感器布置,为了解决如若失效的后果,包括在功能安全中就已经考虑的融合方案,冗余方案,都是为了应对与预防传感器失效后,汽车就处于暂时失明状态,如果驾驶员不能够及时接管,那么就存在潜在危险,对于更高级别无驾驶员参与的驾驶系统,也时刻存在安全隐患。
技术实现要素:
5.针对现有技术中存在的问题,本发明提供一种自动驾驶预期功能安全感知性能局限修改方法及车辆,解决自动驾驶汽车因传感器性能局限而存在安全隐患的问题。
6.本发明提供了一种自动驾驶预期功能安全感知性能局限修改方法,包括以下步骤:
7.s1、针对不同场景,给所需传感器分配置信度;
8.s2、设定每一场景的主传感器,则其余传感器为辅传感器;
9.s3、获取当前场景各传感器的置信度,判断主传感器置信度是否小于该传感器在该场景下的分配置信度;若否,则主传感器不变;若是,则执行步骤s4;
10.s4、判断辅传感器置信度是否小于该传感器在该场景下的分配置信度;若否,则将该辅传感器作为主传感器;若是,则执行步骤s5;
11.s5、分配主传感器权重和辅传感器权重,判断辅传感器置信度与辅传感器权重之积是否小于主传感器置信度与主传感器权重之积;若否,则将该辅传感器作为主传感器;若是,则主传感器不变。
12.进一步,将每一场景中置信度最高的传感器设为主传感器。
13.进一步,主传感器权重大于等于辅传感器权重。
14.本发明还提供一种车辆,该车辆采用上述的自动驾驶预期功能安全感知性能局限修改方法。
15.本发明与现有技术相比,具有以下优点及有益效果:
16.本发明能够有效缓解自动驾驶汽车因传感器性能局限而导致的潜在危险。
附图说明
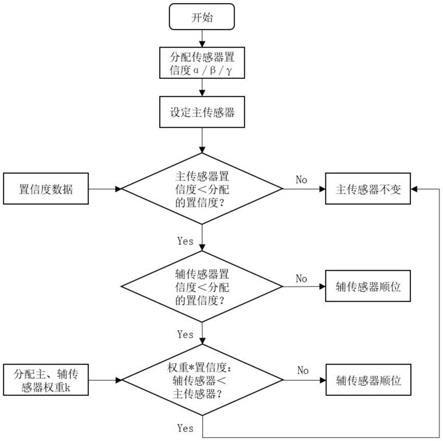
17.图1为本发明实施例的自动驾驶预期功能安全感知性能局限修改方法流程图。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
19.本发明考虑因外界环境因素而造成的自动驾驶汽车感知模块一定程度失效的影响,提供了一种用于自动驾驶预期功能安全感知模块性能局限的修改方法及车辆,用于缓解感知模块由于外界环境因素引起的失效进而导致的潜在的危害。
20.本发明提供了一种自动驾驶预期功能安全感知性能局限修改方法,如图1所示,包括以下步骤:
21.s1、针对不同场景,给所需传感器分配置信度;
22.s2、设定每一场景的主传感器,则其余传感器为辅传感器;
23.s3、获取当前场景各传感器的置信度,判断主传感器置信度是否小于该传感器在该场景下的分配置信度;若否,则主传感器不变;若是,则执行步骤s4;
24.s4、判断辅传感器置信度是否小于该传感器在该场景下的分配置信度;若否,则将该辅传感器作为主传感器;若是,则执行步骤s5;
25.s5、分配主传感器权重和辅传感器权重,判断辅传感器置信度与辅传感器权重之积是否小于主传感器置信度与主传感器权重之积;若否,则将该辅传感器作为主传感器;若是,则主传感器不变。
26.进一步,将每一场景中置信度最高的传感器设为主传感器。
27.进一步,主传感器权重大于等于辅传感器权重。
28.本发明实施例假定一种自动驾驶汽车的传感布置方案,前向采用1个前摄像头、1个前激光雷达、1个前毫米波雷达,侧向采用4个角毫米波雷达。各传感器具体的参数如表1所示:
29.表1传感器参数
30.传感器类别数量功能说明探测距离视场角前摄像头1探测目标信息、车道线信息130-160m120
°
前激光雷达1探测目标车辆的距离120-200m100
°
前毫米波雷达1探测目标信息160-200m90
°
角毫米波雷达4探测相邻车道目标信息60-70m120
°
31.基于上述传感器的布置(假定)方案,对于这些传感器,按照预期功能安全的流程,首先从整车的非预期行为,得到整车层级危害行为造成的影响,分析其主要原因,得到传感感知的局限,即传感器性能缺陷,以及在该性能缺陷下受到的外部环境影响,表2是传感器
性能局限与触发条件的示例。
32.表2传感器性能局限与触发条件
[0033][0034][0035]
针对汽车传感器的使用来分类,可以分为前向传感器和侧向传感器,前向传感器用于感知前向的目标物,包括前摄像头、前激光雷达、前毫米波雷达,侧向传感器用于感知侧向目标物,即相邻车道(左、右)的目标物,包括4个角毫米波雷达。
[0036]
对于侧向传感,功能安全中就针对侧向的角毫米波雷达采用冗余方案来解决,毫米波雷达自身受外部环境的影响比较小,除了自身的参数限制外,仅对外界环境的温度值比较敏感。即便毫米波雷达失效了,车辆只需要跳转到mrc模式,如:保持本车道不变并低速跛行回家(假设驾驶员未接管车辆)等等。
[0037]
对于前向传感,包含前摄像头、前激光雷达、前毫米波雷达,三类传感器对不同的外部环境条件有不同的影响,即在不同外部环境下都有不同的置信度。具体如下:
[0038]
1、前向双目摄像头基于双摄像头偏角原理设置,能够识别障碍物属性,计算障碍物距离,具有成本低,识别度高,检测距离远的特点,但对光照强度要求高,夜晚、雨/雪/雾等恶劣天气环境下无法使用。
[0039]
2、前激光雷达用于检测车辆周围障碍物,检测范围广,检测距离长,精度高,但穿透性不强,雾霾/雨/雪等易被错误检测为障碍物。
[0040]
3、前毫米波雷达为基于多普勒效应的毫米波段雷达设备,具有成本低、动态跟踪、检测距离远的特点,但是噪点多、分辨率低,范围角度小,容易误检、漏检静态障碍物,如:将
减速板、限高杆等误识别为障碍物。
[0041]
本发明通过判断传感器是否适合在某些场景下使用,针对不同场景设定百分数,用来定义其置信度。例如,针对如下环境,前摄像头、前激光雷达、前毫米波雷达具有不同的置信度,如下表3所示:
[0042]
表3不同场景下传感器的置信度
[0043][0044][0045]
本发明假定该传感器融合方案初始值是以前摄像头为主传感器,前激光雷达/前毫米波雷达为辅传感器,主/辅传感器同时检测目标物信息,融合时的数据以主传感器为车辆执行时参照的主要信息。对主/辅传感器的权重进行定义,定义主传感器的权重为k
主
,辅传感器的权重为k
辅
。
[0046]
由于外界环境因素影响,传感器的置信度数据会不停发生变化,即传感器性能局限。故如有以下两个条件会更变主、辅传感器的顺位:
[0047]
1、当主传感器的置信度不大于其在该场景下的置信度,且任一辅传感器的置信度大于其在该场景下的置信度,则置信度最高的辅传感器顺位为主传感器;
[0048]
2、当主传感器的置信度不大于其在该场景下的置信度,且辅传感器的置信度也不大于其在该场景下的置信度时,若辅传感器的置信度与权重的乘积大于主传感器的乘积,则该辅传感器顺位为主传感器。
[0049]
由此可缓解传感器性能局限,提高自动驾驶汽车安全性。
[0050]
本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
