1.本发明涉及机器视觉领域,尤其是涉及换热器自动清洗装置的视觉导航系统及其操作方法。
背景技术:
2.换热器是一种将高温流体的部分热量传递给低温流体的热量交换设备,其作为重要的过程设备在石油、化工、原子能、建材等工业领域中发挥着越来越重要的作用。换热器内部的传热表面会在使用的过程中形成沉淀物,污垢会阻塞通道截面,导致热传递效率下降,甚至存在腐蚀器材引起爆炸等安全隐患。因此,我国相关管理部门要求定期对换热器设备进行清洗、堵漏作业。目前,主流的换热器清洗方式为高压水射流清洗技术,该方法成本低,无污染,但是在实际应用中,多是要求工人手持高压水枪对换热器管束污垢进行强力冲刷,清洗效率低下,劳动强度大并且危险性高。而现有的换热器清洗装置多为半自动化结构,仅可实现自动冲洗,换热器的管口识别和定位仍需要作业人员在旁边操控,整体作业效率受制于人力,容易造成漏洗,并且没有从根本上解决人员安全问题。
3.随着工业4.0时代的到来,机器视觉技术不断更新迭代,在智能制造过程中的引导、检测、测量和识别环节得到了广泛应用,使机器智能化成为现实。因此,可将基于机器视觉的目标检测技术应用于换热器管口识别和定位,显著提高准确率和效率,实现换热器清洗装置的全自动化。
技术实现要素:
4.为了解决背景技术中所述的问题,本发明提供了一种换热器自动清洗装置的视觉导航系统及其操作方法,首先对相机采集到的换热器管束正面图像进行预处理,然后对图像中的管口进行识别,之后通过坐标转换公式求得管口的实际位置,最后进行清洗路径规划并将规划完的路径发送给换热器自动清洗装置喷枪执行机构。
5.为了达到上述目的,本发明提供如下技术方案:
6.一种换热器自动清洗装置的视觉导航系统,包括:工业相机、pc机、通信接口,所述工业相机通过gige接口连接pc机的网口,所述pc机通过usb接口、usb转rs-485接口连接自动清洗装置的喷枪执行机构。
7.一种换热器自动清洗装置的视觉导航系统的操作方法,包括以下步骤:
8.步骤1)利用工业相机获取换热器管束正面图像;
9.步骤2)对获取的正面图像进行预处理,包括畸变矫正和图像增强;
10.步骤3)使用改进yolov3目标检测算法进行管口检测;
11.步骤4)根据相机成像原理利用坐标转换公式将管口圆心像素坐标转换成实际坐标;
12.步骤5)进行清洗作业路径规划;
13.步骤6)将规划后的路径发送给执行机构以进行后续作业。
14.作为优选实施例,所述步骤1)中的工业相机为ccd相机或者cmos相机,获取图像时将像素长宽改成相等大小。
15.作为优选实施例,所述步骤2)和步骤4)中的图像畸变矫正、坐标转换过程中用到的相机内参均通过相机标定得到。
16.作为优选实施例,所述步骤3)中的管口识别使用基于yolov3的目标检测算法,并根据换热器清洗作业具体情况做了改进。
17.作为优选实施例,所述改进具体为:将yolov3算法的主干网络darknet-53替换成轻量级网络mobilenet v2,大幅降低模型的计算量和参数量以提高检测速度;网络的输入大小调整为416
×
416;利用自制数据集对锚框重新进行聚类分析,决定使用9个锚框进行预测,锚框的大小分别是:10
×
10、15
×
15、22
×
23、36
×
36、55
×
55、62
×
63、79
×
78、95
×
96、115
×
116;对mobilenet v2网络的第55层、第116层和第150层的特征图进行检测,其特征图尺寸分别是52
×
52
×
192、26
×
26
×
576和13
×
13
×
1280;将得到的特征图使用上采样来提高尺寸,与网络中对应的图层进行融合,将9个锚框从大到小进行排序后按照更深层的特征图获得更大锚框的原则,平均分配到3个特征图中;最后使用非极大值抑制去除重复的边界框,得到最终的管口检测结果;所述管口识别方法相比于传统的目标检测算法在准确性和实时性上均有大幅提高。
18.作为优选实施例,所述步骤3)中的改进yolov3目标检测算法需要提前利用数据集进行训练。
19.作为优选实施例,所述步骤5)中的路径规划方法为正交路径法,在像素坐标系下完成,算法流程如下:
20.步骤51)求出所有边界框边长的平均值作为管口的直径,记为d;
21.步骤52)找出所有管口圆心坐标中最小的纵坐标值,记为v
min
;
22.步骤53)另外的管口圆心纵坐标记为vi,如果v
i-v
min
<k
·
d,则可认为这些圆位于同一行,k为一阈值;
23.步骤54)将上一步中得到的圆按照横坐标进行排序,奇数行顺序,偶数行逆序;
24.步骤55)剩余的管口重复2~4步操作;
25.步骤56)直至处理完所有管理以后,得到的排序即为清洗路径;
26.步骤57)最终将规划完成的清洗路径由通信接口发送给执行机构,以完成清洗作业。
27.有益效果:本发明的导航系统,可以实时且准确的获取换热器管口的位置,效率高,可以有效降低人力劳动,实现换热器的全自动化清洗作业。
附图说明
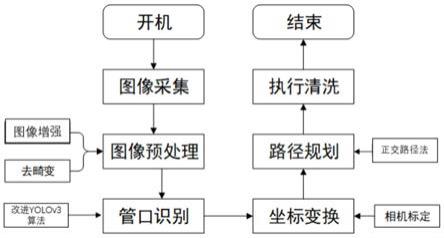
28.图1为本发明实施例所提供的换热器清洗装置视觉导航系统的流程示意图。
29.图2为所述视觉导航系统管口识别模块结构示意图。
30.图3为所述视觉导航系统结果可视化示意图。
31.图4为本发明实施例所提供的换热器清洗装置结构示意图。
32.图中各符号代表:1、底座;2、前后移动导轨;3、竖直移动导轨;4、左右移动导轨;5、滑动安装底座;6、电机机座;7、前后驱动电机;8、竖直驱动电机;9、左右驱动电机;10、联轴
器;11、传动轴;12、滑块。
具体实施方式
33.下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
34.为了使本技术领域内的技术人员更好地理解本发明方案,以下结合本发明实施例中的附图加以说明。
35.请参考图1至图4,图1为本发明实施例所提供的换热器清洗装置视觉导航系统的流程示意图;
36.图2为所述视觉导航系统管口识别网络图;
37.图3为所述视觉导航系统结果可视化;
38.图4为本发明实施例所提供的换热器清洗装置。图4中包括底座1;前后移动导轨2;竖直移动导轨2;左右移动导轨4;滑动安装底座4;电机机座6;前后驱动电机7;竖直驱动电机8;左右驱动电机9;联轴器10;传动轴11;滑块12。
39.本发明实施例提供了一种换热器自动清洗装置视觉导航系统,如说明书附图1所示,主要包括以下步骤:
40.步骤1)工业相机获取换热器管束正面图像,相机应正对于换热器管束面,测量并记录下景深;
41.步骤2)对图像进行预处理,包括畸变矫正和图像增强,所述畸变矫正所需参数需要提前进行相机标定实验获取,采用滤波进行图像增强提高图像质量;
42.步骤3)使用改进yolov3目标检测算法进行管口检测,改进的yolov3目标检测算法网络结构图如图2所示;图像经过mobilenet v2网络的卷积、池化、全连接等操作后,选取网络的第55层、第116层和第150层的特征图进行检测,其特征图尺寸分别是52
×
52
×
192、26
×
26
×
576和13
×
13
×
1280;将得到的特征图使用上采样来提高尺寸,与网络中对应的图层进行融合;将利用数据集聚类得到的9个锚框从大到小进行排序后按照更深层的特征图获得更大锚框的原则,平均分配到3个特征图中进行检测;最后使用非极大值抑制去除检测结果中重复的边界框,得到最终的管口检测结果;
43.步骤4)根据相机成像原理利用坐标转换公式将管口圆心像素坐标转换成实际坐标,该转换依次进过从像素坐标系到图像坐标系、从图像坐标系到相机坐标系和从相机坐标系到世界坐标系,所述坐标转换所需参数需要提前进行相机标定实验获取;
44.步骤5)进行清洗作业路径规划,路径规划过程首先确定位于同一行的管口,并根据奇数行顺序,偶数行逆序的原则确定最终的清洗路径,管口定位与路径规划结果如图3所示;
45.步骤6)系统将规划后的路径转换成命令发生给电机驱动器,控制清洗装置自动执行作业,滑台的运动速度以及单个管口的清洗时间可调节;清洗装置如图4所示,为一三轴龙门滑台,滑台主体包括:两条前后移动导轨、两条竖直移动导轨、一条左右移动导轨、水枪固定结构等,各个方向上的导轨均配有电机控制其运动,清洗装置自动作业时会按照清洗路径依次遍历每一个管口。
46.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。