1.本发明涉及工业机器人关节技术领域,具体地说,涉及将伺服电机与少齿差减速器二者有机地融为一体的关节技术,是一种工业机器人中空少齿差减速一体机。
背景技术:
2.当前,国内的机器人制造商需要分别采购韩国sejin公司的少齿差减速器、伺服电机及润滑脂,然后精密装配成机器人关节,关节中注入足量的特定润滑脂,这种作业不仅效率低,且容易带进杂物污染润滑脂。此外,伺服电机与sejin少齿差减速器的同轴度要求在
±
0.005mm以内,安装精度不良将会出现振动和噪音。
3.机器人工作时,用户无法更换sejin少齿差减速器润滑脂。因此,一旦润滑脂变脏,会使减速器发热,意味着不久机器人将被迫停机。
技术实现要素:
4.发明所要解决的课题
5.本发明的目的是在于克服现有技术的缺陷,提供一种工业机器人中空少齿差减速一体机。
6.发明人经过十多年的理论研究和实践,提出了“消隙齿轮理论 sejin少齿差简化机型”的组合技术方案,获得了重大的理论和制造技术的突破,完成了工业机器人中空少齿差减速一体机的创新。
7.本发明所提供的工业机器人中空少齿差减速一体机,有效解决现有技术中的机器人关节装配效率低、安装精度不良、脂润滑散热性能差、更换润滑脂困难及减速器回差、发热、寿命短等卡脖子技术难题。
8.用于解决课题的方法
9.本发明第一方面涉及一种工业机器人中空少齿差减速一体机,
10.包括少齿差减速部件及伺服电机,
11.少齿差减速部件包括:
12.圆端盖、内齿圈、行星架、无外圈滚子轴承、第一行星轮、第二行星轮、隔圈、第一主轴承、第二主轴承、第一锥轴承及第二锥轴承、中空双偏心轴及大齿轮,
13.大齿轮与中空双偏心轴连接,圆端盖连接在内齿圈的输入侧止口,伺服电机紧固在圆端盖上,伺服电机的输出轴上具有与大齿轮啮合的小齿轮,
14.行星架由主圆盘、副圆盘、柱销及销套组成,
15.柱销的一端与主圆盘上的均布的孔过盈配合,柱销的另一端穿过在第一行星轮和第二行星轮上均布的柱销孔与副圆盘的相应孔过渡配合,柱销数为6或8或10或12,柱销外有销套,
16.柱销孔的直径=销套的外径 2e,e为中空双偏心轴的偏心距,
17.行星架的两侧用第一主轴承和第二主轴承分别支承在内齿圈的两侧内孔处,
18.中空双偏心轴的两侧用第一锥轴承和第二锥轴承分别支承在主圆盘及副圆盘的中心孔处,
19.第一锥轴承与第二锥轴承的外圈背靠背地设于第一锥轴承与第二锥轴承的内圈的中间,第一锥轴承的内圈外侧依次设有隔圈、大齿轮及第一挡圈,第二锥轴承的内圈外侧依次设有圆环调整片及第二挡圈,
20.中空双偏心轴的偏心段与无外圈滚子轴承的内孔过盈配合,而无外圈滚子轴承的外圆与第一行星轮和第二行星轮的中心孔过渡配合,
21.中空双偏心轴的中心孔用以设置电缆线。
22.优选地,中空双偏心轴的两个偏心段的相位差不等于180
°
。
23.优选地,中空双偏心轴的两个偏心段的相位差为178.5
°
~179.5
°
。
24.优选地,中空双偏心轴的两个偏心段的相位差为178.8
°
~179.25
°
。
25.优选地,中空双偏心轴的两个偏心段的相位差为179.0
°
~179.2
°
。
26.优选地,内齿圈内的啮合件的润滑不采用脂润滑而采用油润滑,在内齿圈或端盖上设有加油孔、放油孔及通气帽。
27.发明的效果
28.根据本发明所涉及的工业机器人中空少齿差减速一体机,有效解决了现有的减速器中的回差不达标、发热、寿命短的技术难题,实现了将单级少齿差与伺服电机二者有机地融为一体,从而构成工业机器人的一种全新关节。当伺服电机输入少齿差的转数≤1000rpm时,减速器不出现振动。本发明的工业机器人中空少齿差减速一体机大大简化了结构,降低了中空双偏心轴及行星架制造难度,解决了专用锥轴承、滚针轴承难度,散热空间增加30%-40%因而可改脂润滑为油润滑,因而可自行换油以延长使用寿命。
附图说明
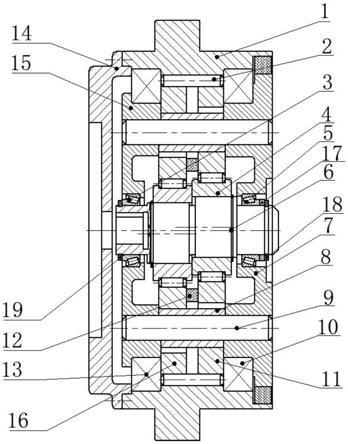
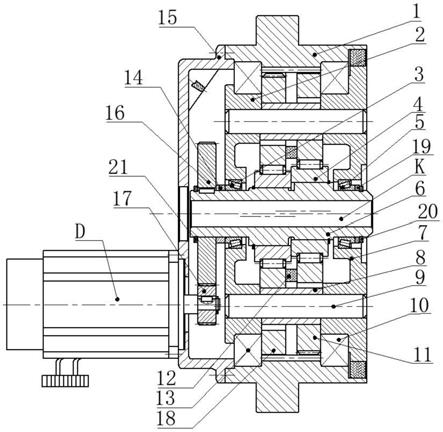
29.图1为本发明的第一实施方式的结构示意图。
30.图2为图1中的行星架结构部分的放大示意图。
31.图3为现有技术中的韩国sejin中空少齿差减速器中的行星架结构图。
具体实施方式
32.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
34.图1为本发明的第一实施方式的工业机器人中空少齿差减速一体机的示意图。图2是图1中的行星架结构部分的放大示意图。如图1和图2所示,该工业机器人中空少齿差减速一体机包括少齿差减速部件及伺服电机部件d。少齿差减速部件包括:圆端盖15、内齿圈1、行星架、无外圈滚子轴承4、第一行星轮11、第二行星轮18、隔圈12、第一主轴承10、第二主轴承13、第一锥轴承3、第二锥轴承5,中空双偏心轴6及与之连接的大齿轮16,圆端盖15连接在内齿圈1的输入侧止口,伺服电机d紧固在圆端盖15上,伺服电机的输出轴上的小齿轮17与
大齿轮16啮合。
35.行星架包括主圆盘7、副圆盘2、柱销9及销套8,其中:柱销9的一端与主圆盘7上均布的孔过盈配合,而另一端穿过第一行星轮11、第二行星轮18上均布的柱销孔与副圆盘2的相应孔过渡配合,柱销9外有销套8,柱销孔的直径=销套8外径 2e(e为中空双偏心轴6的偏心距),柱销9应为偶数,如6或8或10或12等,行星架的两侧用第一主轴承10、第二主轴承13分别支承在内齿圈1的两侧内孔。
36.中空双偏心轴6的两侧用第一锥轴承3、第二锥轴承5分别支承在主圆盘7、副圆盘2的中心孔,第一锥轴承3与第二锥轴承5的外圈以“背靠背”的方式设于第一锥轴承3与第二锥轴承5的内圈的中间,其中:第一锥轴承3的内圈外侧依次有隔圈14、大齿轮16及第一挡圈21,第二锥轴承5的内圈外侧依次有圆环调整片19及第二挡圈20。
37.圆环调整片19用不同厚度调整第一锥轴承3与第二锥轴承5的预紧程度,其目的是提高中空双偏心轴6的扭转刚度,扭转刚度是机器人减速器重要指标。中空双偏心轴6上两侧的第一挡圈21、第二挡圈20还能防止副圆盘2轴向窜动,中空双偏心轴6的偏心段与无外圈滚子轴承4的内孔过盈配合,而无外圈滚子轴承4的外圆与第一行星轮11、第二行星轮18的中心孔过渡配合,二者之间的配合尽可能零间隙,目的保证其产生的回差最小。
38.中空双偏心轴6的中心孔k用以设置电缆线,
39.伺服电机d紧固在圆端盖15上,伺服电机输出轴上的小齿轮17与大齿轮16啮合减速,其目的是使与大齿轮16连接的中空双偏心轴6的输入转数≤1000rpm,因而减速器不会出现振动。
40.在第一实施方式的一个较佳实施例中,优选为,中空双偏心轴6的两个偏心段的相位差不等于180
°
。更优选为,中空双偏心轴6的两个偏心段的相位差为178.0
°
~179.5
°
。进一步优选为,中空双偏心轴6的两个偏心段的相位差为178.5
°
~179.25
°
。更进一步优选为,中空双偏心轴6的两个偏心段的相位差为179.0
°
~179.2
°
。对于中空双偏心轴6的两个偏心段的相位差进行如上所述的取值,可以保证减速器回差≤1
′
从而提高了精度。尤其是在相位差为179.0
°
~179.2
°
时,减小回差的效果最好。
41.在第一实施方式的一个较佳实施例中,优选为,少齿差减速部件的内啮合件的润滑不采用脂润滑而采用油润滑,在内齿圈1或端盖15上设有加油孔、放油孔及通气帽,也就是说将原少齿差减速器内啮合件的脂润滑改为油润滑,当机体内油温升高时,通气帽用以保持机壳的内外油压平衡,防止从油封处漏油。改脂润滑为油润滑,其有益技术效果是,机器人用户毋需拆机即可更换机内脏油,清洁油品能延长减速器使用寿命。
42.采用了第一实施方式的工业机器人中空少齿差减速一体机,与现有工艺相比,有效解决了现有的减速器中的回差不达标、发热、寿命短的技术难题,从而构成工业机器人的一种全新关节。
43.具体来说,与韩国sejin公司的少齿差减速器相比,获得了如下有益技术效果:
44.(1)与图3中的现有技术相比,本发明的少齿差减速部件去掉了太阳轮、三只行星轮,还去掉了中空双偏心轴上六只专用圆锥滚子轴承及六只专用滚针轴承,专用的圆锥滚子轴承及滚针轴承,国内产品质量不如国外,价格却偏高,而且电机驱动太阳轮、行星轮运转时,六只圆锥轴承及六只滚针轴承发热、噪声较大。由于将现有的少齿差减速部件中的一半多的零件进行结构简化而成为摆线传动,因此缩短了机加工工时,提高了生产率进而降
低了制造成本,同时还降低了发热和噪声。日本纳博公司的技术手册指出:“两级减速机构:振动小;飞轮矩gd2小;公转速度变慢,振动减小及惯性减小。”也就是说,只要少齿差输入≤1000rpm就能保证振动小、飞轮矩小。
45.(2)国内机器人制造商分别采购韩国sejin公司的少齿差减速器、伺服电机及润滑脂,然后精密装配成机器人关节。这种作业不仅效率低,且难以保证伺服电机与少齿差减速器同心度
±
0.005mm,本发明的工业机器人中空少齿差减速一体机将电机驱动与少齿差减速有机地融为一体,作业效率高且能够保证同心度符合要求。
46.(3)对现有的韩国sejin公司的少齿差减速器装机时,用户必须自行注入油脂,而少齿差减速器腔体内添加润滑油脂的作业极其繁琐,极易将脏物带入减速机腔体,造成油脂污染,从而降低减速器使用寿命。本发明的工业机器人中空少齿差减速一体机由于将现有的少齿差减速部件中的一半多的零件进行结构简化而成为单级少齿差,因此壳体内可储油腔比现有的少齿差减速器增大30%-40%,而且在改脂润滑为油润滑的时候,散热性能好、操作工换油方便,而且油比脂价格低得多。
47.(4)本发明的工业机器人中空少齿差减速一体机由于将现有的韩国sejin公司的少齿差减速部件中的一半多的零件进行结构简化而成为单级少齿差,还很大程上减少了减速器关键件的制造难度。中空双偏心轴必须在昂贵的进口随动磨床上加工,三只小直径中空双偏心轴刚性差,因而生产效率低、成本高。进口随动磨床价格昂贵且交货期慢。中空双偏心轴系轴承钢gcr15,须锻打
→
回火
→
调质
→
半精车
→
铣削轴端花键
→
整体淬火
→
磨双偏心,中空双偏心轴相位差精度高,工艺难度大。少齿差减速器的行星架刚性盘组件是核心支撑部件,结构复杂,精度要求高。本发明的工业机器人中空少齿差减速一体机由于将现有的少齿差减速部件中的一半多的零件进行结构简化而成为单级少齿差,因此行星架结构简单、机加工工艺难度小、成本低及装拆方便。特别是,专用圆锥滚子轴承外圆与行星架均布孔配合,其均布孔相邻距偏差难以自动补偿,专用滚针轴承外径与行星轮均布孔无间隙配合,内孔与中空双偏心轴偏心段外圆无间隙配合,行星轮均布孔相邻距偏差难以补偿,因而必然影响了传动精度,而本发明的工业机器人中空少齿差减速一体机的行星架中柱销的微小弹性变形能自动补偿行星轮柱销孔的相邻距偏差。
48.产业应用性
49.根据本发明所涉及的工业机器人中空少齿差减速一体机,有效解决了现有的减速器中的回差不达标、发热、寿命短的技术难题,实现了将单级少齿差与伺服电机二者有机地融为一体,从而构成工业机器人的一种全新关节。
50.以上所述仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。