全自动uv清洗设备
技术领域
1.本发明涉及uv清洗技术领域,更为具体地,涉及一种全自动uv清洗设备。
背景技术:
2.uv清洗技术是一种新型的前沿电子产品物料清洗技术,由uv光源发射波长为185nm和254nm的高能量光波,当作用到被清洗物体表面时,因光敏作用空气中的氧气分子吸收了185nm波长的紫外光后会产生臭氧和原子氧。臭氧对254nm波长紫外光有强烈的吸收作用,分解为原子氧和氧气。因原子氧极其活泼,可使物体表面上的碳和碳氢化合物的分解物化合成可挥发气体二氧化碳、水蒸气等逸出表面,从而彻底清除黏附物体表面的污染物。
3.但是目前在国内电子产品制造业中,线路板uv清洗一直未形成流水化和自动化作业,清洗效率和质量有待于进一步提升。
技术实现要素:
4.鉴于上述问题,本发明的目的是提供一种全自动uv清洗设备,以解决现有的线路板uv清洗未形成全自动化以及流水化的问题。
5.本发明提供的全自动uv清洗设备,包括uv清洗室、物料输送系统、与所述uv清洗室相连通的排风系统,以及电控系统,其中,
6.所述uv清洗室,用于通过uv清洗灯对附着在电子产品物料的表面污染物进行清洗;
7.所述物料输送系统,用于将待清洗的电子产品物料输送至所述uv清洗室,并将清洗后的电子产品物料从所述uv清洗室转移至卸料位置;
8.所述排风系统,用于抽排所述uv清洗室的空气,以调节所述uv清洗室中的温度以及臭氧含量;
9.所述电控系统,用于控制所述uv清洗室、所述物料输送系统以及所述排风系统相互配合,完成对所述电子产品物料的清洗。
10.此外,优选的方案是,所述uv清洗室包括支架、设置在所述支架的两侧的入口闸门和出口闸门,其中,
11.在所述支架的每一侧均设置有双滑轨,所述入口闸门、所述出口闸门分别通过所述双滑轨与所述支架相连接,其中,
12.在所述入口闸门、所述出口闸门上分别设置有提升气缸,所述入口闸门、所述出口闸门分别通过所述提升气缸沿所述双滑轨移动。
13.此外,优选的方案是,所述uv清洗室包括设置在所述支架上的uv清洗灯、设置在所述uv清洗灯上方的挡板和透气板,其中,
14.在所述挡板上设置有挡板气缸,所述挡板在所述挡板气缸的带动下遮挡所述uv清洗灯或远离所述uv清洗灯;
15.在所述透气板上均匀设置有微孔,通过所述微孔对所述uv清洗灯散热。
16.此外,优选的方案是,所述uv清洗室包括温度传感器和uv清洗灯电流监控器,其中,
17.所述温度传感器,用于检测所述uv清洗室的温度;
18.所述uv清洗灯电流监控器,用于监控所述uv清洗灯工作流值大小来判断是否处于正常状态。
19.此外,优选的方案是,所述uv清洗室包括盖板,其中,
20.所述盖板、所述支架、所述入口闸门与所述出口闸门形成封闭式的清洗空间。
21.此外,优选的方案是,所述物料输送系统包括传动丝杠模组、设置在所述传动丝杠模组的伺服电机以及物料放置工装,其中,
22.所述物料放置工装带着电子产品物料在所述伺服电机的作用下在所述传动丝杠模组上移动。
23.此外,优选的方案是,在所述传动丝杠模组设置有所述伺服电机的安全限位开关,所述安全限位开关包括负限位开关、原位限位开关以及正限位开关,其中,
24.所述物料放置工装通过所述伺服电机的安全限位开关定位在所述传动丝杠模组的预设位置。
25.此外,优选的方案是,所述排风系统包括与所述uv清洗室相连通的阀门组件、与所述阀门组件相连通的缓冲箱、与所述缓冲箱相连通的排风机,其中,
26.所述阀门组件包括阀门管道和阀门,所述阀门管道与所述uv清洗室相连接,所述阀门管道通过所述阀门连通所述缓冲箱;
27.所述排风机通过所述缓冲箱、所述阀门组件对所述uv清洗室排风。
28.此外,优选的方案是,还包括温控仪和臭氧检测仪,其中,
29.所述温控仪与所述温度传感器相连接,用于显示所述温度传感器所检测到的所述uv清洗室的温度;
30.所述臭氧检测仪,用于检测所述uv清洗室的臭氧含量。
31.此外,优选的方案是,还包括设置在设备框架上的防护罩、安全光幕以及设置在设备框架的底部的可移动底脚,其中
32.所述防护罩罩设在所述uv清洗室以及所述物料输送系统上;
33.所述安全光幕设置在所述uv清洗室的入口,用于避免操作人员因误操作受伤。
34.从上面的技术方案可知,本发明提供的全自动uv清洗设备,通过电控系统控制uv清洗室、物料输送系统以及排风系统相互配合完成对所述电子产品物料的全自动清洗,避免清洗作业的安全隐患,并提高清洗效率和清洗质量,从而解决了现有的线路板uv清洗未形成全自动化以及流水化的问题。
35.为了实现上述以及相关目的,本发明的一个或多个方面包括后面将详细说明的特征。下面的说明以及附图详细说明了本发明的某些示例性方面。然而,这些方面指示的仅仅是可使用本发明的原理的各种方式中的一些方式。此外,本发明旨在包括所有这些方面以及它们的等同物。
附图说明
36.通过参考以下结合附图的说明的内容,并且随着对本发明的更全面理解,本发明
的其它目的及结果将更加明白及易于理解。在附图中:
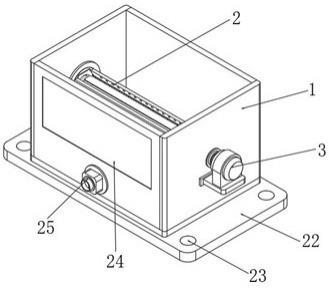
37.图1为根据本发明实施例的全自动uv清洗设备结构示意图;
38.图2为根据本发明实施例的uv清洗室结构示意图;
39.图3为根据本发明实施例的物料输送系统结构示意图;
40.图4为根据本发明实施例的排风系统结构示意图。
41.其中的附图标记包括:1、支架,2、入口提升气缸,3、出口提升气缸,4、入口闸门双滑轨,5、出口闸门双滑轨,6、出口闸门,7、盖板,8、挡板,9、挡板气缸,10、温度传感器,11、uv清洗灯,12、物料放置工装,13、传动丝杠模组,131、伺服电机,14、负限位开关,15、原位开关,16、正限位开关,17、阀门组件,18、缓冲箱,19、左工位排风机,20、右工位排风机,21、排风口,22、状态指示灯,23、防护罩,24、触摸屏,25、操作按钮,26、温度仪,27、安全光幕,28、臭氧检测仪,29、uv清洗室,30、物料输送系统,31、急停按钮,32、排风系统,33、可移动底脚。
42.在所有附图中相同的标号指示相似或相应的特征或功能。
具体实施方式
43.在下面的描述中,出于说明的目的,为了提供对一个或多个实施例的全面理解,阐述了许多具体细节。然而,很明显,也可以在没有这些具体细节的情况下实现这些实施例。在其它例子中,为了便于描述一个或多个实施例,公知的结构和设备以方框图的形式示出。
44.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
45.针对前述提出的现有的以解决现有的线路板uv清洗未形成全自动化以及流水化的问题,本发明提供了一种全自动uv清洗设备。
46.以下将结合附图对本发明的具体实施例进行详细描述。
47.为了说明本发明提供的全自动uv清洗设备的结构,图1至图4分别从不同角度的全自动uv清洗设备进行了示例性标示。具体地,图1示出了根据本发明实施例的全自动uv清洗设备结构;图2示出了根据本发明实施例的uv清洗室结构示;图3示出了根据本发明实施例的物料输送系统结构;图4示出了根据本发明实施例的排风系统结构。
48.如图1至图4共同所示,本发明提供的全自动uv清洗设备,全自动uv清洗设备,包括uv清洗室、物料输送系统、与所述uv清洗室相连通的排风系统,以及电控系统,其中,所述uv清洗室,用于通过uv清洗灯对粘附在电子产品物料的表面污染物进行清洗;所述物料输送系统,用于将待清洗的电子产品物料输送至所述uv清洗室,并将清洗后的电子产品物料从所述uv清洗室转移至预设位置;所述排风系统,用于抽排所述uv清洗室的空气,以调节所述uv清洗室中的温度以及臭氧含量;所述电控系统,用于控制所述uv清洗室、所述物料输送系统以及所述排风系统相互配合,完成对所述电子产品物料的清洗。
49.在本发明的实施例中,通过uv清洗室、物料输送系统、排风系统,以及电控系统,配合各类控制和检测元件,使uv清洗流水化和自动化。
50.在图1和图2所示的实施例中,uv清洗室29包括支架1、设置在所述支架1的两侧的
入口闸门和出口闸门6,其中,在所述支架1的每一侧均设置有双滑轨,所述入口闸门、所述出口闸门6分别通过所述双滑轨与所述支架1相连接,其中,在入口闸门、出口闸门6上分别设置有提升气缸,入口闸门、出口闸门6分别通过提升气缸沿双滑轨移动。
51.具体地,在所述支架1的入口一侧设置有入口闸门双滑轨4,入口闸门通过入口闸门双滑轨4与支架1相连接,在入口闸门设置有入口提升气缸2,入口闸门在入口提升气缸2的作用沿入口闸门双滑轨4上下移动;在支架的出口一侧设置有出口闸门双滑轨5,出口闸门6通过出口闸门双滑轨5与支架1相连接,在出口闸门6设置有出口提升气缸3,出口闸门在出口提升气缸3的作用于下沿出口闸门双滑轨5上下移动。在本发明的实施例中,采用双滑轨结构,可以保证稳定性和快速开关,并便于检测处理异常情况。
52.在图1和图2所示的实施例中,,uv清洗室29还包括设置在所述支架1上的uv清洗灯11、设置在所述uv清洗灯11上方的挡板8和透气板,其中,在所述挡板8上设置有挡板气缸9,所述挡板8在所述挡板气缸9的带动下遮挡所述uv清洗灯11或远离所述uv清洗灯11;在所述透气板上均匀设置有微孔,通过所述微孔对所述uv清洗灯散热。
53.其中,所述uv清洗室包括温度传感器10和uv清洗灯电流监控器,所述温度传感器10用于检测所述uv清洗室的温度;所述uv清洗灯电流监控器,用于监控所述uv清洗灯工作流值大小来判断是否处于正常状态。通过设置温度传感器以及uv清洗灯电流监控器,以便清楚知道清洗室内的清洗状态,以便达到最佳清洗条件,以保证清洗效果。
54.此外,所述uv清洗室包括盖板7,所述盖板7、所述支架1、所述入口闸门与所述出口闸门5形成封闭式的清洗空间,结合挡板8的设计,可以防止清洗室的uv光和臭氧溢出。
55.在图1和图3所示的实施例中,所述物料输送系统30包括传动丝杠模组13、设置在所述传动丝杠模组13的伺服电机131以及物料放置工装12,其中,所述物料放置工装12带着电子产品物料在所述伺服电机131的作用下在所述传动丝杠模组13上移动。其中,在所述传动丝杠模组13设置有所述伺服电机131的安全限位开关,所述安全限位开关包括负限位开关14、原位限位开关15以及正限位开关16,其中,所述物料放置工装12通过所述伺服电机131的安全限位开关定位在所述传动丝杠模组13的预设位置。
56.在本发明的实施例中,伺服电机配合传动丝杠模组,可以到达到0.001mm精确定位级别,因此可进行各类精密零件清洗;物料放置工装12可根据具体应用进行产品个性化设计,满足不同产品和不同清洁度要求的定位清洗,因此在此不对物料放置工装12的具体结构做具体限定;此外,全限位开关的设计能够保证工作过程的稳定可靠,并精准到达预设位置。
57.在图1和图4所示的实施例中,所述排风系统32包括与所述uv清洗室29相连通的阀门组件17、与所述阀门组件17相连通的缓冲箱18、与所述缓冲箱18相连通的排风机,其中,所述阀门组件17包括阀门管道和阀门,所述阀门管道与所述uv清洗室29相连接,所述阀门管道通过所述阀门连通所述缓冲箱;所述排风机通过所述缓冲箱18、所述阀门组件对所述uv清洗室排风。在图3所示的实施例中,由于是双工位设计,因此排风机为两台,分别为左工位排风机19和右工位排风机20,在具体应用中,可根据实际情况,通过排风系统将uv清洗室达到最佳抽排状态。其中,排风机可以采用高性价比直流型风机,与设置的uv清洗灯电流监控器、臭氧检测仪值连锁闭环控制,以达到清洗室的清洗状态达到最佳状态。其中,排风机采用无刷可调速直流电机,可以在0-16500rpm范围内平滑调速,满足各种不同材料和清洗
工况的排风要求。
58.在本发明的实施例中,电控系统包含电源部分、plc控制器、伺服驱动器、触摸屏、io等部分,其中,触摸屏组态画面可实现伺服电机工作位置、运行速度等个性化设置和状态实时监控、异常自诊断报警及历史数据查询、远程联网操控调整等功能,在满足设备控制监视的同时满足生产、设备、工艺、品质等不同岗位人员个性化管理或技术需求。
59.在图1所示的实施例中,全自动uv清洗设备还包括状态指示灯22、温控仪26和臭氧检测仪28,其中,所述温控仪26与所述温度传感器10相连接,用于显示所述温度传感器所检测到的所述uv清洗室的温度;所述臭氧检测仪28用于检测所述uv清洗室的臭氧含量。
60.此外,全自动uv清洗设备还包括设置在设备框架上的防护罩23、触摸屏24、安全光幕27、急停按钮31以及设置在设备框架的底部的可移动底脚33,其中所述防护罩23罩设在所述uv清洗室以及所述物料输送系统上;所述安全光幕27设置在所述uv清洗室的入口,用于避免操作人员因误操作受伤。
61.在本发明的实施例中,全自动uv清洗设备可采用多工位设计,即:可以采用单个工位对物料进行清洗,也可以采用双工位或者更多工位对物料进行清洗,在具体应用可以根据实际情况设置不同的工位的清洗设备。
62.其中,各个工位可各自独立工作互不影响,可实现一人多机操作,人工或机械手取产品放至上料位,上料位光纤检测到产品到位、安全光幕检测安全后发出可操作信号,按下双手按钮开始进入如下的清洗操作过程:
63.首先,对全自动uv清洗设备进行初始化;对挡板气缸、出口提升气缸、入口提升气缸、伺服电机进行初始位置的检查;
64.然后,对物料进行清洗,
65.第一步:人工放料到物料输送系统的物料放置工装,并双手按钮启动设备;
66.第二步:物料检测,通过扫描检测物料放置工装上是否有需要清洗的物料;如果没有,则报警提示;
67.第三步:uv清洗室的入口闸门打开;
68.第四步:伺服电机带动物料放置工装到预设的工作位;
69.第五步:挡板气缸带动挡板打开uv清洗灯照射,照射到预设时间;
70.第六步:uv清洗室的出口闸门打开;
71.第七步:伺服电机带动物料放置工装到卸料位置;
72.第八步:人工取下物料;
73.第九步:伺服电机带动物料放置工装返回原点;
74.第十步:清洗室的出入口闸门关闭。
75.在上述清洗过程中,uv清洗室的臭氧浓度超过1.5%,温度超过60℃报警加速排风;并且在照射时间以及卸料位置均设置报警提示,在此过程中,如果与预设时间和预设位置不同时,设备会报警提示,接收到报警后,催对异常进行处理,要对报警原因进行确认,然后根据原因进行人工处理或者自动处理,报警信号复位,然后重新按下运行按钮,从而完成一次报警处理,并且每次报警处理,都在电控系统中自动记录。
76.通过上述实施方式可以看出,本发明提供的全自动uv清洗设备,通过电控系统控制uv清洗室、物料输送系统以及排风系统相互配合完成对所述电子产品物料的全自动清
洗,避免清洗作业的安全隐患,并提高清洗效率和清洗质量,从而解决了现有的线路板uv清洗未形成全自动化以及流水化的问题。
77.如上参照附图以示例的方式描述了根据本发明提出的全自动uv清洗设备。但是,本领域技术人员应当理解,对于上述本发明所提出的全自动uv清洗设备,还可以在不脱离本发明内容的基础上做出各种改进。因此,本发明的保护范围应当由所附的权利要求书的内容确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。