1.本实用新型属于仿生机器人技术领域,特别是涉及一种蛇形攀爬仿生机器人。
背景技术:
2.蛇形仿生机器人是一种能够模仿蛇的运动机理和行为方式的仿生机器人,由于其环境适应性强,运动灵活性好,结构易模块化,具有很大的研究价值和应用前景。
3.目前,绝大多数的蛇形仿生机器人在功能上仅能够满足前进和后退,而且结构非常复杂,虽然在一定程度上可以适应多种不同的地形,然而受到自身结构的限制,无法像真实的生物蛇一样进行攀爬,导致传统的蛇形仿生机器人在应用场景和环境适应能力方面存在局限性。
技术实现要素:
4.针对现有技术存在的问题,本实用新型提供一种蛇形攀爬仿生机器人,能够在较小的空间内以较小的运动范围实现前进和后退动作,不但具有良好的越障能力,而且面对树木等柱状物体时还具有良好的攀爬能力,有效扩展了蛇形仿生机器人的应用场景,有效提高了蛇形仿生机器人的环境适应能力。
5.为了实现上述目的,本实用新型采用如下技术方案:一种蛇形攀爬仿生机器人,包括头部、身躯及尾部,所述身躯由若干串联的躯体单元节组成;所述头部与躯体单元节之间、相邻躯体单元节之间、躯体单元节与尾部均通过舵机相连;所述躯体单元节包括身躯骨架筒体、电机、齿轮、内齿圈及全向轮;所述身躯骨架筒体一端筒口固定设有舵机转接支臂,舵机转接支臂用于连接相邻舵机的动力输出轴;所述电机固定安装在舵机转接支臂一侧的身躯骨架筒体内部,电机的电机轴与身躯骨架筒体的中轴线相平行;所述齿轮固定安装在电机的电机轴上;所述身躯骨架筒体另一端筒口固定设有舵机安装支臂,所述舵机固定安装在舵机安装支臂上;所述全向轮通过轴承套装在身躯骨架筒体外侧;所述内齿圈套装在身躯骨架筒体外侧,且内齿圈与全向轮的轮盘同轴固连在一起;在所述内齿圈内侧的身躯骨架筒体上开设有一处豁口,所述齿轮通过豁口与内齿圈相啮合。
6.所述头部包括头部骨架筒体、控制器、摄像头、温湿度传感器及空气质量传感器;在所述头部骨架筒体的后端筒口也固定设有舵机转接支臂,舵机转接支臂用于相邻躯体单元节上的舵机动力输出轴相连;所述摄像头设置在头部骨架筒体的前端筒壁上;所述控制器、温湿度传感器及空气质量传感器均设置在头部骨架筒体内部;所述舵机、电机、摄像头、温湿度传感器及空气质量传感器均与控制器电连接;在所述头部骨架筒体的侧筒壁上安装有检修口,在检修口外侧设置有检修盖板。
7.所述尾部包括尾部骨架筒体及供电电池;在所述尾部骨架筒体的前端筒口也固定设置有舵机安装支臂,舵机安装支臂上固定安装有舵机;所述供电电池设置在尾部骨架筒体内部;所述舵机、电机、控制器、摄像头、温湿度传感器及空气质量传感器均由供电电池进行供电。
8.本实用新型的有益效果:
9.本实用新型的蛇形攀爬仿生机器人,能够在较小的空间内以较小的运动范围实现前进和后退动作,不但具有良好的越障能力,而且面对树木等柱状物体时还具有良好的攀爬能力,有效扩展了蛇形仿生机器人的应用场景,有效提高了蛇形仿生机器人的环境适应能力。
附图说明
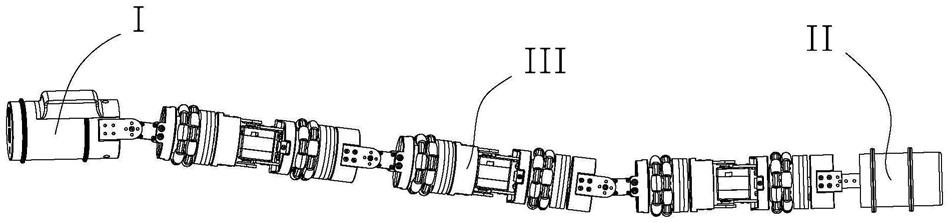
10.图1为本实用新型的一种蛇形攀爬仿生机器人的结构示意图;
11.图2为本实用新型的躯体单元节的结构示意图;
12.图3为本实用新型的头部的结构示意图;
13.图4为本实用新型的尾部的结构示意图;
14.图中,i—头部,ii—尾部,iii—躯体单元节,1—舵机,2—身躯骨架筒体,3—电机,4—内齿圈,5—全向轮,6—舵机转接支臂,7—舵机安装支臂,8—头部骨架筒体,9—检修盖板,10—尾部骨架筒体。
具体实施方式
15.下面结合附图和具体实施例对本实用新型做进一步的详细说明。
16.如图1~4所示,一种蛇形攀爬仿生机器人,包括头部i、身躯及尾部ii,所述身躯由若干串联的躯体单元节iii组成;所述头部i与躯体单元节iii之间、相邻躯体单元节iii之间、躯体单元节iii与尾部ii均通过舵机1相连;所述躯体单元节iii包括身躯骨架筒体2、电机3、齿轮、内齿圈4及全向轮5;所述身躯骨架筒体2一端筒口固定设有舵机转接支臂6,舵机转接支臂6用于连接相邻舵机1的动力输出轴;所述电机3固定安装在舵机转接支臂6一侧的身躯骨架筒体2内部,电机3的电机轴与身躯骨架筒体2的中轴线相平行;所述齿轮固定安装在电机3的电机轴上;所述身躯骨架筒体2另一端筒口固定设有舵机安装支臂7,所述舵机1固定安装在舵机安装支臂7上;所述全向轮6通过轴承套装在身躯骨架筒体2外侧;所述内齿圈4套装在身躯骨架筒体2外侧,且内齿圈4与全向轮6的轮盘同轴固连在一起;在所述内齿圈4内侧的身躯骨架筒体2上开设有一处豁口,所述齿轮通过豁口与内齿圈4相啮合。
17.所述头部i包括头部骨架筒体8、控制器、摄像头、温湿度传感器及空气质量传感器;在所述头部骨架筒体8的后端筒口也固定设有舵机转接支臂6,舵机转接支臂6用于相邻躯体单元节iii上的舵机1动力输出轴相连;所述摄像头设置在头部骨架筒体8的前端筒壁上;所述控制器、温湿度传感器及空气质量传感器均设置在头部骨架筒体8内部;所述舵机1、电机3、摄像头、温湿度传感器及空气质量传感器均与控制器电连接;在所述头部骨架筒体8的侧筒壁上安装有检修口,在检修口外侧设置有检修盖板9。
18.所述尾部ii包括尾部骨架筒体10及供电电池;在所述尾部骨架筒体10的前端筒口也固定设置有舵机安装支臂7,舵机安装支臂7上固定安装有舵机1;所述供电电池设置在尾部骨架筒体10内部;所述舵机1、电机3、控制器、摄像头、温湿度传感器及空气质量传感器均由供电电池进行供电。
19.下面结合附图说明本实用新型的一次使用过程:
20.当机器人需要改变整体形态时,只需启动舵机1即可,通过舵机1改变头部i与躯体
单元节iii之间、相邻躯体单元节iii之间或躯体单元节iii与尾部ii的夹角即可。
21.当机器人需要移动时,只需启动电机3即可,当电机3启动后,首先带动齿轮转动,进而带动与之啮合的内齿圈4转动,由于内齿圈4与全向轮6轮盘同轴固连,通过内齿圈4的转动就可以带动全向轮6同步转动,最终通过全向轮6的转动实现机器人的移动。
22.当机器人需要攀爬树木等柱状物体时,先将机器人移动到柱状物体底部,然后先调整头部i的姿态,使头部i仰起并以缠绕状态搭接在柱状物体上,随后控制机器人整体移动,在移动过程中,继续控制首节的躯体单元节iii仰起,同样以缠绕状态搭接在柱状物体上,然后再控制机器人整体移动,依次类推,直到尾部ii也以缠绕状态搭接在柱状物体上,此时机器人整体以缠绕状态停留在柱状物体上。
23.当机器人整体缠绕停留在柱状物体后,控制机器人上的所有舵机1锁死,保证机器人整体缠绕状态被锁定,之后控制所有电机3启动,仅由电机3提供动力,此时机器人身躯上的若干全向轮5都为机器人攀爬提供动力,且机器人便会沿着缠绕状态下的螺旋路径向上移动,与地面作业相比,有效扩展了蛇形仿生机器人的应用场景。
24.实施例中的方案并非用以限制本实用新型的专利保护范围,凡未脱离本实用新型所为的等效实施或变更,均包含于本案的专利范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
