1.本发明的各个方面涉及水平仪,然而本文中公开的技术的各个方面可以有用地应用于其他环境。
背景技术:
2.水平仪是用于测量物体的定向的装置。历史上,水平仪包括可放置抵住目标物体的平面,以及用于发出指示目标物体的定向的信号的定向信号瓶。通常,瓶是透明的,具有略微弯曲的内部并且大部分但不完全填充有液体,留有气泡。气泡沿着弯曲内部的位置在视觉上发出目标物体的定向的信号。一些水平仪具有两个相互垂直的瓶,以交替地用于直立和调平操作。各种现代水平仪包括电子定向传感装置(例如,加速度计)和相关的信号器,以补充或替换一个或多个瓶。
3.图1示出了一种现有技术的使立柱u直立的方法。操作者o1将水平仪sl保持抵住立柱u的前部,并且将信息传递给第二个操作者o2。对角撑db从立柱u向前和向下延伸,以穿过固定到地面中的桩s。
4.响应于来自操作者o1的消息,操作者o2操作对角撑db,例如,如果操作者o1发出立柱u向前倾斜的信号,操作者o2可能会用锤子敲击对角撑db的下端几下以拉直立柱。一旦立柱被直立,对角撑则可以固定到桩s,例如,在钉枪的帮助下。
5.例如,在设置栅栏柱时,通常会使用这样的方法,例如,一旦立柱u的混凝土基础设置好,对角撑db则可能会被拿走。类似的方法通常用于竖直撑柱墙,在这种情况下,墙的单个撑柱是立柱u,并且在撑柱墙已固定到相邻墙等后,可以取下对角撑db。
6.本发明人已经认识到,这种流行的方法具有显著的缺点。对两个操作者的需求是低效的,特别是因为在许多施工环境中,寻找和打断第二个操作者来提供帮助会导致效率低下。
7.美国专利第7,908,753号公开了一种水平仪,该水平仪包括臂,该臂安装为抵抗偏置向外枢转,以在水平仪的参考表面和臂的撑柱接合部分之间保持撑柱,用于无手扶操作。尽管如此,本发明人已经认识到进一步的改进是可能的。
8.非常希望将上述直立操作减少为一个操作者的操作,以提供水平仪(或其他装置)在面对诸如上述锤击的干扰时更能保持在立柱上,并且提供一种便于存放的装置。
9.因此,本发明的各个方面意在为可安装到立柱和/或在立柱中和用于直立立柱的装置提供改进,或至少为与这些事物有关的事物提供有用的替代方案。
10.不能被认为上述描述表示承认本专利说明书中的任何信息是公知常识,或者可以合理地期望本领域技术人员确定或理解这些信息、认为其是在优先权日之前相关的或以任何方式将其组合。
技术实现要素:
11.本发明的一个方面提供一种可安装到立柱上的装置;
12.所述装置包括主体和臂;
13.所述主体围绕立柱轴线从第一定向到第二定向相对于所述立柱是可翻转的,
14.所述主体包括
15.第一接触部分,被布置为当所述主体处于第一定向时接触所述立柱的前部;
16.第二接触部分,被布置为当所述主体处于第二定向时接触所述立柱的前部;
17.所述臂相对于所述主体能从第一位置移动到第二位置:
18.在所述第一位置处,所述臂向后延伸超过所述第一接触部分,以到达所述立柱的一侧并且接合所述立柱的后部;
19.在所述第二位置处,所述臂向后延伸超过所述第二接触部分,以到达所述立柱的另一侧并且接合所述立柱的后部;
20.在所述第一位置和所述第二位置中的每个中,所述臂从所述主体向上延伸并且相对于所述主体是能运动的,以使所述主体的重量能够张紧所述臂。
21.所述主体优选地是细长的主体并且当处于所述第一定向和所述第二定向中的每个时是直立的。最优选地,在所述第一位置和所述第二位置中的每个中,所述臂从所述主体向上延伸并且至少接近围绕水平轴线能相对于所述主体运动,以使所述主体的重量能够张紧所述臂。所述水平轴线离所述主体的顶部在所述主体的长度的六分之一至二分之一(包含)的范围内。
22.可选地,所述臂能移动到储存位置,其中,所述臂基本上全部在所述主体内。
23.本发明的另一方面提供一种可安装到立柱的装置;
24.所述装置包括主体和臂;
25.所述主体是细长的主体并且包括被布置为接触所述立柱的前部的接触部分;
26.所述臂能相对于所述主体从第一位置移动到储存位置,
27.在所述第一位置处,所述臂
28.向后延伸超过所述第一接触部分,以到达所述立柱的一侧并且接合所述立柱的后部;
29.从所述主体向上延伸并且至少接近围绕水平轴线能相对于所述主体运动,以使所述主体的重量能够张紧所述臂;
30.在所述储存位置处,所述臂基本上全部在所述主体内。
31.所述水平轴线离所述主体的顶部在所述主体的长度的六分之一至二分之一(包含)的范围内。
32.该装置可以包括一构件。可以设置臂枢转连接,通过所述臂枢转连接,所述臂安装为相对于所述构件枢转。还可以设置构件枢转连接,通过所述构件枢转连接,所述构件安装为相对于所述主体围绕水平前后轴线枢转。优选地,所述臂枢转连接在所述构件枢转连接之上。可以设置有棘爪,以将所述构件枢转连接固定为保持臂枢转连接水平。所述棘爪可以是磁性的。
33.可选地,一个或多个弹性元件与所述臂枢转连接相关联并且被布置为当所述臂远离所述主体枢转时被加载。
34.优选地,所述臂和所述构件包括当所述臂远离所述主体枢转时可配合为轴向地加载所述一个或多个弹性元件的特征。
35.所述臂可以包括定位为接触所述立柱的所述后部并且与所述主体的立柱中心配准的触点。所述触点可以是尖状部。所述臂可以包括限定所述触点的可更换触点单元,例如,因此可以将尖状部换成弹性(例如,橡胶)接触部分,以抓持坚硬的表面。
36.优选地,所述主体具有在包含端点在内的50mm至100mm的范围内的前后外部尺寸。最优选地,所述主体具有在包含端点在内的15mm至50mm的范围内的横向外部尺寸。
37.所述装置的撑柱接收能力被限制为具有不大于约152mm的前后尺寸的撑柱。
38.所述装置可以包括用于发出指示所述立柱的定向的信号的信号器。
39.优选地,所述指示可由位于立柱前方大于1米的使用者判断。
40.本发明的另一方面提供了一种装置,包括:
41.安装布置结构,用于将所述装置安装在立柱上;
42.信号器,用于向在立柱的前方的使用者发出信号指示需要将立柱向后和向前倾斜,以使立柱被直立。
43.所述信号器可以用于视觉地发出信号和/或听觉地发出信号。
44.本发明的另一方面提供了一种直立立柱的方法;
45.立柱在其上安装有所述装置;
46.所述方法包括:响应于所述信号移动所述立柱。
47.可选地,所述移动包括操纵从所述立柱向前和向下延伸的支架。
附图说明
48.图1示意性地示出了传统的直立操作;
49.图2是安装在立柱上的水平仪的透视图;
50.图3是水平仪的一部分的透视图;
51.图4是对应于图3中a-a线的横向截面图。
52.图5是图3的水平仪的一部分的纵向截面图;
53.图6是水平仪的透视图;
54.图7是电子单元的正视图;
55.图8示出了电子单元的一个显示器;
56.图9是图6的水平仪的电子器件的原理图;
57.图10是图7的电子单元的加速度计的俯视图;
58.图11是加速度计的侧视图。
具体实施方式
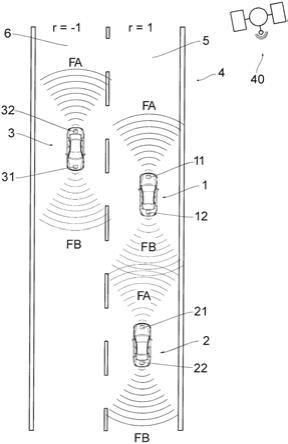
59.图1示出了呈包括主体3和臂5的水平仪形式的装置1。
60.主体3是细长主体。在这个特定示例中,主体的大部分由铝挤压件形成,当然,其他材料和构造模式也是可能的。主体3具有约70mm长(在前后方向上延伸)和约30mm宽的矩形轮廓。约4英尺的水平仪长度,比如,在1100mm到1300mm(包含端点)的范围内,是流行的尺寸。
61.主体3具有平面的前表面3a和平面的后表面3b。图2示出了与撑柱st的平面的前表面ff共形接触的平面的后表面3b,由此,主体3相对于撑柱st定向。
62.如本文中所用的措辞,平面的后表面3b构成无限的接触部分。交替的接触布置是可能的。以示例的方式,三个点接触的接触部分将足以使主体3相对于撑柱st定向。
63.臂5安装为相对于主体3绕水平轴线ha枢转。臂5在其端部具有限定用于接触和接合撑柱st的后部的尖状部5a的返回部。尽管其他形式的触点也是可能的,单个尖状部是优选的,例如,可能会使用一组尖状部或抓握垫。
64.在图2所示的位置,臂5以向上的倾斜角从主体3向后延伸,以接合撑柱st的后部。尖状部5a接合撑柱st的后部,从而主体3的重量在一定程度上悬挂在臂上。这使臂5处于张紧状态,从而倾向于挤压主体3和尖状部5a之间的撑柱st,从而基本上抓住撑柱st,以将水平仪1安装在撑柱st上。
65.臂中的张紧力驱动尖状部5a接合,以增强在撑柱st的后部处的保持,并且臂中的张紧力的水平分量促进后部3b和前部ff之间的摩擦接合。
66.应记住的是,所有固体材料具有一定程度的弹性,水平力(和相应的摩擦力)沿着主体-撑柱界面3b的分布,ff是不均匀的,并且在枢转轴线ha附近具有最大值,即,在臂的根部附近。
67.已发现的是,将枢转轴线ha以及该最大值定位在距水平仪的顶部在水平仪长度的三分之一
±
六分之一的范围内会使得更牢固的安装。
68.已经发现,当受到干扰时(诸如,在直立操作过程中的锤击),主体3可能围绕水平轴线ha附近的前后轴线摆动。通过将该摆动点定位在水平仪的中点之上,水平仪趋于稳定悬挂。当受到其他模式的干扰时,水平仪可以围绕后部3b的顶部边缘枢转。将枢转轴线ha与该顶部边缘隔开给出了臂杠杆中的张紧力的水平分量,以控制这样的运动。
69.干扰还可能使得主体3绕其纵向轴线扭转,进而从撑柱st上掉下来。为了解决这个问题,尖状部5a(或其他触点)优选地定位为与主体3的直立中心平面对齐放置。
70.在简单的变型中,装置1可以具有安装在主体3和臂5之间的简单的枢转轴线,当臂5不与撑柱st接合时,其可以通过该枢转轴线自由摆动。也就是说,自由摆动的臂可以是一种刺激,例如,当水平仪用于其他(例如,调平)任务时。当需要储存水平仪和/或在建筑工地的颠簸和翻滚中损坏时,其也可能会妨碍。
71.图3至图5示出了优选的安装布置结构7,臂5通过该安装布置结构被安装,以相对于主体3运动。
72.安装布置7包括呈成形块形式的构件9,该构件安装为围绕前后轴线faa枢转。臂5进而可枢转地连接到构件9。
73.主体3包括臂容纳空间3c,在该示例中,该臂容纳空间包括纵向槽和用于容纳尖状部5a的端部形状。
74.图5示出了臂5处于其储存位置,在该位置处,臂5位于主体3的矩形轮廓内(即,不从其突出)。在储存位置处,臂被收起,以不延伸主体3的包装封套。其也受到保护,免受损坏。在水平仪5的其他变型中,主体3可以具有工字梁轮廓。如在本文中使用了这种措辞和类似措辞,为了避免疑义,在主体内在这样的轮廓的每侧上限定空隙。通常,主体的包装封套具有对应于包围主体的轮廓的最小可能凸多边形的轮廓。优选地,该臂可完全收纳在该封套内。
75.在储存位置处,臂5相对于构件9枢转的枢转轴线ha基本上垂直于主体3的长度。在
本示例中,采用磁性棘爪机构的形式的棘爪机构10将构件9和臂5保持在该位置处。
76.当需要将装置1安装在撑柱st上时,可以抓住臂5,通过使块9绕轴线faa枢转来将其从接收空间3c提起。臂5然后可以绕轴线ha枢转并且放置在撑柱st的后面并被操纵以使构件9恢复其轴线ha垂直于主体3的位置。棘爪10重新接合,以保持该相对定向。
77.在优选的变型中,设置偏置机构,通过该偏置机构,臂5围绕轴线ha朝向主体3偏置。这实现三重优势。首先,偏置提供了与撑柱st的小程度附加接合。其次,该偏置将臂推向尖状部5a抵靠后部3b的位置,在该位置,其不会“左右摆动”,以尽可能多地在位。第三,偏置促使尖状部5a接合撑柱的后部,从而更容易安装该装置。
78.优选的偏置机构需要在构件9的外部上的凸轮部分9a,并且当臂围绕轴线ha枢转时,臂沿着该凸轮部分9a骑置。凸轮9a将枢转运动转换为轴向运动,通过该轴向运动,例如碟型垫圈5c的弹性元件被压缩。
79.水平仪1的另一个有利变型没有碟型垫圈5c。代替的是,采用磁性布置,将臂保持在其收起构造中。这种磁性布置的优选变型包含沿着臂接纳空间3c间隔开的两个磁体,优选地朝向空间3c的每端。
80.在这个有利的实施方式中,当臂被拉离这些磁体时,围绕轴线faa枢转的块和沿着凸轮表面9a骑置的臂的组合确保尖端5a在去往其部署位置的途中越过水平仪1的长角。在展开位置处,臂在没有将其偏向回到主体的垫圈5的情况下自由摆动。
81.附图仅示出本发明的一个示例。各种其他示例是可能的。以示例的方式,虽然在主体3和臂5之间存在枢转轴线连接,但是还有其他选择。臂5可能具有弹性向内部分,该向内部分刚性连接到主体3并且可弹性变形,以使臂5能够向外“枢转”以接合撑柱st的后部。如本文中使用了这种措辞和类似措辞,这样的运动是臂至少近似地围绕水平轴线ha运动的示例。
82.图2示出了围绕撑柱侧sst延伸的臂5。发明人已经认识到,在一些情况下,诸如在撑柱墙的角部处,撑柱的这一侧可能是不可接近的。另一方面,立柱与相应的不可接近的侧面的对齐可以是重要的,例如,角部撑柱的对齐对于方便和准确地安装石膏板(干墙)是重要的。因此,水平仪1是可翻转的。代替使臂5向后枢转超过后表面3b,臂可以以另一种方式枢转超过前表面3a。通过围绕其竖直轴线转动水平仪1a,前部变为后部,用于抵接前表面ff,并且臂5可以围绕在撑柱st的另一侧。
83.轴线faa、ha之间的竖直分离通过减小构件9在臂5内的张紧力的影响下相对于主体3围绕轴线faa旋转的趋势来稳定安装布置结构。
84.绝大多数撑柱在前后方向上在70mm到152mm(6英寸)的范围内。70mm、90mm和6英寸是常见的尺寸。根据优选的变型,装置1具有限制为具有不超过约152mm的前后尺寸的撑柱的撑柱接收能力,例如,不超过155mm。在该示例中,当臂5水平时,为了使尖状部5a和后部3b之间的这种水平间隔最大化,存在足够的空间来容纳6英寸的撑柱。当安装在这样的6英寸的撑柱上时,臂5以仅在水平线以上的非常浅的角度从主体向上延伸。这使得臂5中的张紧力较大。当将相同的水平仪应用于较小的撑柱时,臂5以更直立的角度延伸,由此张紧力的程度相对较低。发明人已经发现的是,选择刚好适合约6英寸的立柱的臂长度在70mm到6英寸的范围内的木撑柱上效果很好。
85.当然,其他尺寸也是可能的,例如,可能为较重的工业应用提供更长的臂。
86.用于发出前后倾角的信号的传统信号器(例如,瓶)通常可以从水平仪的侧面而不是水平仪的前面看到。相比之下,装置1的优选变型包括用于向立柱前面的操作者发出信号的信号器。一种形式的信号器可以包括一个或多个视觉指示器(例如,一个或多个灯,诸如led),该视觉指示器定位为从撑柱的正前方观察,以便为在前后竖直平面中延伸的支架db的下端处的操作者提供关于立柱的定向的信息。可听信号也是可能的,例如,装置1可能产生一系列音调,或者实际上信号可以采取语音的形式。
87.装置1的简单变型可能包括两个不同颜色的灯,它们齐平表面3a或凹入在该表面内(即,不突出面3a),一个灯可操作以发出立柱需要向后倾斜的信号,而另一个灯被点亮以发出立柱需要向前倾斜的信号。优选地,信号提供与竖直的偏差幅度的指示。以示例的方式,五个灯的变型可以具有两个灯,以用于分别在需要较大的前后运动时发出信号,另外两个灯用于分别指示何时需要较小的前后运动,以及一个单独的灯被点亮以传达立柱足够竖直。同样,类似的信息可能会通过可听信号传送。
88.图6示出了水平仪的优选的五个灯的变型。水平仪1'包括主体3'、臂5'、把手105和五个灯阵列101。阵列101是视觉定向信号器的示例。优选地,水平仪的两个长窄边中的每个具有视觉定向信号器。更优选地,这两个长边中的每个的每端都具有视觉定向信号器。
89.阵列101包括五个灯,例如,五个led。在该示例中,阵列是线性阵列,阵列的中心灯是绿灯g。绿灯g被一对琥珀色灯a1、a2包围,而这些灯又被一对红灯包围r1、r2。
90.在优选的实施方式中,当直立立柱时,如果立柱远离竖直,则红灯r1、r2中的一个闪烁。随着立柱朝向竖直移动,并且经过了超出竖直的阈值,相邻的琥珀色灯将开始闪烁,随着进一步移动,红灯将熄灭,随着进一步移动,绿灯将点亮,随着进一步移动,相邻的琥珀色光会熄灭。这使得绿灯g成为唯一的照明灯,因此发出立柱是竖直的(在预定公差内)的信号。以这种方式,向使用者呈现需要移动立柱的幅度和方向的简单直观指示。附加地或替代地,可能改变闪光灯的频闪率以传送信息。优选地,红灯r1、r2以比琥珀色灯a1、a2更快的速度闪烁,而琥珀色灯a1、a2又以低于绿灯的速度闪烁。最优选地,绿灯一直亮着(对应于零闪烁率)。当然,还存在其他方式可能改变频闪率和/或占空比等,以利用廉价硬件(例如,利用led)以直观的方式传送定向的指示。通过这个直观的界面,可以加快直立操作并且使其变得更容易。操作者可以变得习惯直观的界面,由此,当操作者观察视觉(和/或诸如音频的其他)信号变化时,他们可以本能地将立柱快速移动到位置。
91.可听信号也可以提供帮助,特别是在明亮的阳光下,视觉信号可能难以辨认,并且也可以作为视觉信号的替代方案。为此目的,水平仪可以配备有扬声器103。
92.更精细的信号形式是可能的,例如,信号器可能采用蓝牙装置的形式,可与操作者佩戴的耳机配合使用。
93.优选地,水平仪还包括电子单元107,其优选地可拆卸地固定到主体3'。优选地,其可以用从主体3的长而宽的表面开口的插座固定。
94.最优选地,电子单元107包含用于促进单元107的操作作为独立的定向感测和显示单元的定向感测布置(例如,加速度计)、显示器109、113b以及诸如阵列101和/或扬声器103的用于将信息传送到输出的数据出口。
95.优选的变型包括屏幕109、模式按钮111和计算器113。在这种情况下,计算器113包括按钮阵列113a和lcd屏幕113b,然而,在其他变型中,屏幕109、113b可以被集成。
96.单元107具有类似于传统计算器的尺寸和形式。特别地,在其承载按钮和显示器的正表面(如图7所示)后面是接触部分(例如,平面的表面或至少3个共面点),单元107可以通过该接触部分与平面的表面抵接。单元107具有可选择的靶心模式,使得在该定向中,显示器109显示靶心输出,该靶心输出指示下面的平面的表面与水平面的偏差(如图7所示)。
97.图8示出了其中指示与水平的角度的另一种模式中的屏幕109。在优选的变型中,单元107响应于单元107的定向而在模式之间自动切换。
98.优选地,单元107包含加速度计115,以感测由于重力引起的加速度g,并且从而提供单元107的定向的指示。图10和图11示出了来自加速度计115的潜在输出,对应于竖排直立(pu)、竖排向下(pd)、横排左侧(ll)、横排右侧(lr)、后(下)和前(下)。
99.加速度计115优选地是三轴电容式微加工加速度计。最优选地,其与单元107的arm控制器117接口,以显示检测到的数据并操作计算器113a、113b。
100.当然,本领域的普通技术人员将领会的是,鉴于本文中的公开内容,可以毫无困难地使用多种合适的定向感测装置(例如,加速度计)和信号器。
101.如上所述,水平仪的优选变型提供led指示,指示装置需要以哪个方式移动以使其进入到水平位置(或视情况而定,直立位置)。在优选的变型中,除了这种视觉指示外,还提供预先记录的语音提示来帮助操作者。该音频指示可以是视觉指示的替代方案。优选地,音频指示由内置在单元107中的音频放大器和读卡器119提供。卡储存预先记录的消息。装置119经由串行连接连接到arm处理器111。经由这种连接,处理器117控制应该播放哪些预先记录的消息。
102.消息将取决于检测到的单元107的定向。常见消息可以包括:
103.向前倾斜
104.向后倾斜向左倾斜
105.向右倾斜
106.左上
107.右上
108.左下
109.右下
110.当直立立柱时,语音命令可以对应于关于阵列101描述的视觉指示的每个视觉指示。
111.最优选地,实现竖直所需的运动通过向前和向后运动和/或朝向或远离操作者的运动来传送。为此目的,单元107优选地预编程有默认高度的立柱(例如,2400mm),通过该高度,通过加速度计感测到的与竖直的角度偏离可以被转换为立柱的顶部所需的水平运动。可选地,高度可以是使用者可设置的。
112.在一个实施方式中,可以包括针对操作者的指令。以示例的方式,预先记录的语音命令可能包括口语消息,以使得当立柱在竖直的2mm内时,立柱是竖直的并且应该被固定住(例如,预先记录的消息“定点;钉住它”)。相同的标准可以应用于停用琥珀色灯而绿灯保持点亮。
113.当立柱远离竖直例如大于10mm时,预先记录的消息可以说“拉向您”或“推离您”(视情况而定)。同样,相同的标准可以应用于灯r1、r2。
114.当立柱从竖直定向移动超过10毫米时,消息可能会更改以指示需要较小的移动,例如指示“向您拉一点”或“向您推开一点”。
115.当然,除了预先记录的(或以其他方式合成的)语音消息之外的可听指示也是可能的。以示例的方式,当立柱直立时,蜂鸣器可以响起。
116.单元103可以可选地包括另外的使用者输出103',诸如辅助led和蜂鸣器。优选地,单元107还包括电池和电压调节器121。
117.单元107可以通过任何方便的方式与阵列101(和/或扬声器103)通信。蓝牙是一种选择。尽管无线通信是优选的,但是当单元107装配在水平仪的一侧上的插座中(或以其他方式附接到水平仪的该侧)时,直接电接触是另一种选择。
118.水平仪的原型中使用的数字加速度计是nxp半导体mma8451q。
119.mma8451q采用先进的定向检测算法(能够检测所有六个定向)和可配置的跳变点。嵌入式算法允许选择具有所需滞后值的中点。
120.mma8451q定向检测算法通过可配置的z锁定角度确认功能可靠性。基于线性加速度计的已知功能,不可能围绕z轴旋转装置,以检测低角速度下的加速度变化。装置不再检测到定向变化的角度被称为z锁定角度。装置从平面位置向下操作14
°
。
121.实际定向通过使用传感装置计算的g力值确定。存在阈值,该阈值将为6个位置中的每个生成唯一的1或0值。一旦在测试后确定最终值,该最终值将进入参数组,访问该参数组的人员将由专利所有者授权。
122.这是这些定向计算的最终输出表。
[0123][0124][0125]
本发明不限于本文中所述的示例。相比之下,本发明由权利要求限定。
[0126]
臂5可能有利地用于安装除水平仪之外的装置。以示例的方式,诸如聚光灯、旋转
激光器和电源板的装置可以配备有用于以这种方式安装的臂(并且优选地为细长的主体)。相反,通过任何方便的方式可安装到立柱,以将前后倾斜传递给立柱前方的操作者的装置将是有利的。以示例的方式,装置的基本形式可以包括传统水平仪、用于将水平仪安装在立柱前部的传统g型夹、以及使水平仪的相关瓶能够从立柱前方看到的镜子。
[0127]
术语“包括”及其语法变型的含义通过其出现的上下文来确定。因此,除非上下文另有规定,否则不应排他地解释该术语。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。