koordinatensystem)中的地点和/或定向(orientierung)。由于工作范围的分配取决于该运动的自由度,因此例如能够实现:为几乎位于相同地点上的两个车辆的雷达传感器分配不同的工作范围,使得避免干涉。相反,在车辆在空间上彼此相距得远的情况下,雷达传感器能够在同一工作范围中工作,而不必担心干涉。同样地,也能够根据车辆的定向来分配工作范围,例如通过下述方式,即当两个雷达传感器关于其相应的车辆指向前方并且两个车辆的定向彼此相反时,为两个车辆的雷达传感器分配不同的工作范围。因此能够实现,当每个雷达传感器直接接收由另一雷达传感器发送的信号时,不发生干涉。同样内容类似地也适用于如下雷达传感器对:所述雷达传感器关于其相应的车辆具有不同的定向。
12.在从属权利要求中给出本发明的有利的构型方案和扩展方案。
13.给定的雷达传感器的工作范围的特征能够在于所发送的信号所在的频带,或者在经编码的信号的情况下,在于一组由该雷达传感器发送的代码符号。同样地,工作范围的特征也能够在于频带和编码的不同组合。
14.另外,工作范围的特征能够在于确定的活动时间窗口,在所述活动时间窗口内,雷达传感器的发送-接收部分是活跃的。然而,在这种情况下,必须使不同车辆的雷达传感器同步,以便保证活动时间窗口稳定地保持彼此分开。任意一种能够无线接收的时间信号能够用于同步,所述时间信号例如是全球导航卫星系统(英语:global navigation satellite system,缩写:gnss)(例如gps)的信号、移动无线电网络的时间信号或者无线电钟信号。时间信号不必是能够持续地被接收的,而是如果使车辆的或雷达传感器的本地时间以一定的间距与时间信号同步,就足矣。
15.雷达传感器的工作范围的特征也能够在于由活动时间窗口的确定的选择和频带和/或编码组成的组合。
16.如果车辆分别具有导航系统,则能够基于地点自由度分配工作范围。例如,在导航系统所使用的数字地图中能够为每个道路如此定义两个或者更多个工作范围,使得适用于该道路上的两个行驶方向的工作范围彼此不同。通过这种方式避免在该道路上相遇的两个车辆的雷达信号相互干渉。
17.在彼此相遇的车辆的情况下避免干涉的另一种可能性在于,根据车辆或雷达传感器相对于北方方向的定向分配工作范围,更确切地说,如此分配,使得安装到两个不同车辆中且具有彼此相反的定向(通过雷达传感器相对于车辆的向前方向的定向和车辆相对于北方方向的定向来确定)的雷达传感器具有不同的工作范围。在该情况下,车辆甚至不必具有导航系统,而是如果足够准确的指南针功能可使用,原则上也足矣。
18.根据角度选择的频带也允许相互重叠,然而优选仅在边缘上相互重叠。由于接收到的雷达信号在信号分析处理时通常在频率空间中经历加窗(fensterung),因此,在频带的边缘上本来就发生对接收到的信号的一定的抑制,由此也抑制与别的雷达传感器的信号的干涉。
19.优选地,为传感器的不同的定向方向进行的频带分配是如此选择的,使得两个定向方向之间的角度差越接近180
°
,则频带的重叠越小。
20.由于相似的效应,不同雷达传感器的活动时间窗口也可以至少在边缘上彼此重叠。在此,加窗、例如在fmcw雷达的情况下越过多个快速线性调频斜坡的加窗(在二维傅立叶变换的一维度中),导致对干涉的明显抑制。
附图说明
21.以下,根据绘图更详尽地阐述实施例。
22.附图示出:
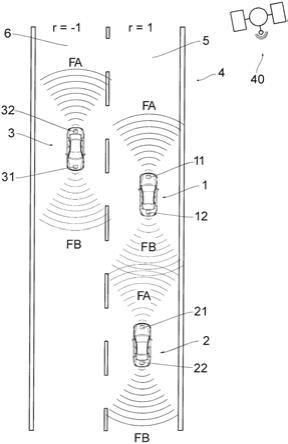
23.图1示出用于阐述根据本发明的方法的交通状况的简图;
24.图2示出用于展示在图1所示交通状况中雷达传感器之间的能够预计的干涉的矩阵。
25.图3示出用于为图1所示雷达传感器分配频带的示例。
26.图4示出导航系统的数字地图,该数字地图具有用于雷达传感器的频带的分配规定;
27.图5示出用于解释在两个雷达传感器的情况下活动时间窗口的同步的频率/时间图表;
28.图6示出用于阐述根据本发明的方法的另一种实施方式的风玫瑰图;
29.图7示出用于根据定向为雷达传感器分配频带的示例;
30.图8示出在根据图6和图7的方法的情况下频带重叠的图表。
具体实施方式
31.在图1中示出如下交通状况:在该交通状况中,三个车辆1、2、3在道路4上行驶,该道路对于每个行驶方向各具有一车道5、6。车辆1和2在相同的方向上在车道5上行驶,而车辆3在车道6上向它们迎面而来。
32.车辆1在前部具有沿行驶方向指向前方的雷达传感器11并且在后部具有沿行驶方向指向后方的雷达传感器12。车辆2和3也具有雷达传感器21、22或31、32的相同布置。雷达传感器的雷达波束分别通过非写实的波浪标示。
33.三个车辆1、2、3中的每个车辆具有车载导航系统,该车载导航系统与gps卫星40通信。在导航系统中存在关于当前车辆所行驶的道路4以及关于本车辆的行驶方向的信息。
34.在图1所示状况中,车辆1的雷达传感器12和车辆2的雷达传感器21彼此如此对置,使得雷达传感器12直接接收由雷达传感器21发送的雷达波,反之亦然。如果两个传感器在相同的频带中工作,则因此由于两个传感器中的干涉而产生干扰。
35.在雷达传感器21和31组成的对的情况下,也应预期这样的干涉。
36.如果车辆3在略晚的时间点经过了车辆2,则雷达传感器22和32也彼此对置,使得在此也能够产生干涉。虽然车辆1和2的雷达传感器11和22在图1中彼此背离地指向,使得能够预计没有干扰,然而不能够排除车辆2稍后超过车辆1,然后可能产生雷达传感器11与22之间的干涉。
37.雷达传感器11、21和32的雷达波束都指向相同的方向,使得在此至少不存在从一传感器到另一传感器的直接的信号传输。由于雷达信号的反射,干涉最多可能小程度地出现。这也同样适用于三个雷达传感器12、22和31。
38.为了减小由于干涉产生的干扰的危险,雷达传感器11、21和32在一频带fa中工作,而雷达传感器12、22和31在另一频带fb中工作。频带fa和fb彼此错开得如此远,使得不存在重叠。由于每个雷达传感器仅对具有位于该雷达传感器的频带中的频率的接收信号做出反应,因此避免干扰性的干涉。
39.为了保证每个雷达传感器在正确的频带中工作,为车道5分配方向参数r=1,而为车道6分配方向参数r=-1。现在,当对于相关的车辆所在的车道的方向参数r具有值1时,为沿行驶方向指向前方的雷达传感器11、21和31分配具有频带fa的工作范围a,而当该方向参数具有值-1时,为所述雷达传感器分配具有频带fb的工作范围b。在沿行驶方向指向后方的雷达传感器12、22和32的情况下,工作范围a和b的分配恰好相反。
40.在图2中示出雷达传感器11-32配对(paarungen)的矩阵,该雷达传感器配对在具有高干涉危险的意义上彼此“敌对”。所述配对在矩阵中以阴影部分示出。此外,在矩阵的边缘上,为每个雷达传感器说明相关的工作范围a或者b。可以看出,由于根据方向参数r分配工作范围,因此,对于每对雷达传感器适用的是:当雷达传感器彼此敌对时,所述雷达传感器具有彼此不同的工作范围a和b。
41.在图3中,雷达传感器11-32布置在水平轴上,所述雷达传感器工作的频率f绘制在竖直轴上。分配有工作范围a的雷达传感器11、21和32在频带fa中工作,另外三个雷达传感器在频带fb中工作。所述频带如此彼此错开,使得所述频带彼此不重叠,使得实际上不出现干涉。
42.通过未示出的控制设备来控制车辆1、2、3中的每个车辆的雷达传感器的功能,所述控制设备从相应的车辆的车载导航系统获得数据。所述数据也包括适用于当前的道路4和本车辆的当前的行驶方向的方向参数r,该方向参数确定工作范围a和b的分配。
43.图4示出用于数字地图42的一个示例,该示例具有车辆中的一个车辆(例如车辆1)当前所行驶的区域中的道路网络的片段。雷达传感器从导航系统获得如下信息:本车辆当前位于道路4上。在数字地图中也存储有用于每个行驶方向的方向参数r。本车辆的位置和行驶方向像常见的那样通过光标44说明。根据所述信息能够像在上文在图1至图3的背景下描述的那样在每个车辆中分配工作范围。
44.数字地图42的在图4中示出的片段还包含另外的道路46和48。对于所述道路46和48,对于每个行驶方向也存储有一方向参数,该方向参数说明:哪个行驶方向具有值1,哪个行驶方向具有值-1。能够设定确定的规则用于选择方向参数,例如,r=1表示向北或者向东的行驶方向,r=-1表示向南或者向西的行驶方向。然而,由于道路的可能弯曲的走向,可能发生的是,在同一道路上行驶期间方向参数发生变化。
45.特别可靠的用于确定方向参数的方法在于,在对于所有导航系统具有约束力的协议(konvention)中,为每个道路和每个行驶方向唯一明确地分配一方向参数。
46.雷达传感器的工作范围能够不仅在频带方面不同,还能够例如在时间窗口方面不同,在所述时间窗口内雷达传感器的发送-接收部分是活跃的。通常,用于机动车的雷达传感器(例如fmcw雷达传感器)发送经频率调制的信号的一周期性序列,在所述周期性序列中,活动时间窗口和静止窗口相互交替,在所述活动时间窗口中进行发送和接收,在所述静止窗口中既不进行发送、也不进行接收。在活动时间窗口期间,对接收到的数据进行数字化和存储并且递交给处理器,然后,该处理器接管进一步的分析处理。然而,对数字数据的分析处理通常所需要的时间比在测量阶段期间对数据的收集所需要的时间更多。出于该原因,活动时间窗口通过静止窗口分开,在所述静止窗口中,结束对在先的测量周期中记录的数据的分析处理。
47.图5示出用于两个雷达传感器的频率调制模式ma和mb的一个示例。每个调制模式
包含活动时间窗口50和静止窗口52的一周期性次序,在所述活动时间窗口中进行测量、即发送和接收雷达信号,在所述静止窗口中,发送接收部分是不活跃的并且仅进行对数据的分析处理。敌对的雷达传感器的调制模式ma和mb在此如此同步,使得一雷达传感器的活动时间窗口50分别处在另一传感器的静止窗口52中。通过这种方式,能够避免两个雷达传感器的信号之间的干涉。然而前提是,通过全局时间信号将雷达传感器的本地时钟发生器相互同步,所述本地时钟发生器确定活动时间窗口和静止窗口的次序。全局时间信号例如能够是由gpd卫星40接收的信号。
48.因此,雷达传感器的工作范围不仅能够在所使用的频带方面、还能够在相应的活动时间窗口50的位置方面彼此不同。如果工作范围不仅能够在所使用的频带方面、还能够在相应的活动时间窗口方面彼此不同,则可使用的工作范围的数量能够增大。同样也可能的是,雷达传感器发送经编码的信号。在这种情况下,工作范围还能够在所使用的代码符号方面不同。
49.根据图6至图8应阐述经变换的实施例,在该实施例中,以更大数量的不同的工作范围工作并且根据相应的传感器在全局坐标系中的定向来分配工作范围,所述定向例如是相对于确定的罗盘方向(himmelsrichtung)的。
50.在图6中示出风玫瑰图(windrose),在该风玫瑰图中,箭头52说明雷达传感器相对于南方方向s的定向(即主要的发送方向和接收方向)。箭头52与南方方向s之间的角度用α表示,并且在间隔(-π,π](上极限π属于该间隔,而下极限-π不属于该间隔)中变化。角度α能够准连续地变化或者以一定的增量(例如1
°
、15
°
等等)变化。
51.工作范围也能够通过连续的参数来表征,例如通过频带的中心fc、活动时间窗口的开始和类似物。然后,根据一函数确定工作范围的分配,该函数说明标记(kennzeichnen)工作范围的参数与角度α的关系。
52.图7示出一个示例,在该示例中,工作范围是具有固定的宽度bw和具有作为角度α的函数变化的中心频率fc的频带f(α)。所有频带都位于具有宽度bw
band
和具有中心频率f
c,band
的总带54内。
53.在所示出的示例中,各个频带的宽度bw是总带的宽度bw
band
的四分之一,并且如此选择中心频率fc,使得如果α在从-π到 π的范围中变化,则完全充分利用总带,并且如果两个雷达传感器彼此敌对,即对于所述两个传感器而言角度α相差π(180
°
),则相关的频带彼此不重叠。在图7中示出的频带分配基于下述公式:
54.fc=f
c,band
(α/π)(bw
band-bw)/2。
55.如果对于两个雷达传感器的角度α之间的差变得更小,则相关的频带彼此靠得更近,并且如果角度差变得小于π/2(90
°
),则所述相关的频带开始彼此重叠。然而,在这种配置中已经非常不可能出现:由一传感器发送的射束非常通过另一传感器直接接收。
56.如果宽度bw占总宽度bw
band
的较大的比例,则不可避免的是,频带之间的重叠变得更大。
57.在图8中,对于具有宽度bw
band
=5ghz的总带,针对频带(以mhz为单位)的不同的宽度bw并且针对雷达传感器的定向之间的不同的角度偏差δα,以图形的方式示出频带(以mhz为单位)的重叠的程度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
