技术特征:
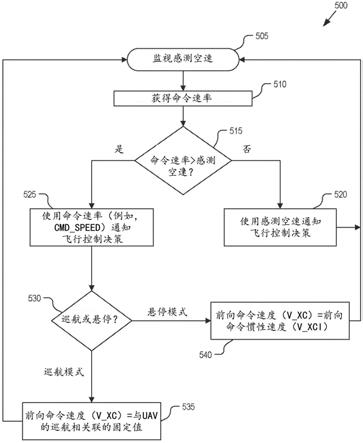
1.一种控制无人飞行器uav的方法,所述方法包括:监视uav的感测空速;获得uav的命令速率,所述命令速率表示以相对于uav正在飞行穿过的气团或uav正在其上方飞行的地球的给定速率飞行uav的命令;以及当命令速率大于感测空速时,使用命令速率代替感测空速来通知uav的飞行控制决策。2.如权利要求1所述的方法,还包括:当感测空速大于命令速率时,使用感测空速而不是命令速率来通知uav的飞行控制决策。3.如权利要求1所述的方法,其中,所述飞行控制决策包括以下中的至少一个:调度用于推进uav的推力,或分配针对uav的控制面的控制工作。4.如权利要求1所述的方法,其中,uav的感测空速包括在飞行期间由uav的机载传感器感测的空速的测量。5.如权利要求1所述的方法,其中,获得uav的命令速率包括将命令速率cmd_speed计算为:其中,v_xc表示uav的前向命令速度并且v_yci表示uav的横向命令惯性速度,所述横向命令惯性速度被计算为沿着uav的命令路径指向的命令惯性速度的横向分量。6.如权利要求5所述的方法,还包括:当uav以巡航模式操作时,将前向命令速度设置为与uav的巡航模式相关联的固定值。7.如权利要求6所述的方法,还包括:当uav以悬停模式操作时,将前向命令速度设置为uav的前向命令惯性速度,该前向命令惯性速度被计算为沿着uav的命令路径指向的命令惯性速度的前向分量。8.如权利要求7所述的方法,其中,所述悬停模式包括向巡航模式加速和从巡航模式减速。9.如权利要求1所述的方法,其中,所述uav包括垂直起降vtol uav,所述vtol uav包括至少一个垂直推进单元和至少一个水平推进单元。10.至少一种机器可访问存储介质,其提供指令,所述指令在由无人飞行器uav的控制系统执行时将使uav执行操作,所述操作包括:监视uav的感测空速;获得uav的命令速率,所述命令速率表示以相对于uav正在飞行穿过的气团或uav正在其上方飞行的地球的给定速率飞行uav的命令;以及当命令速率大于感测空速时,使用命令速率代替感测空速来通知uav的飞行控制决策。11.如权利要求10所述的至少一种机器可访问存储介质,还提供指令,所述指令在由控制系统执行时将使uav执行进一步的操作,所述进一步的操作包括:当感测空速大于命令速率时,使用感测空速而不是命令速率来通知uav的飞行控制决策。12.如权利要求10所述的至少一种机器可访问存储介质,其中,所述飞行控制决策包括
以下中的至少一个:调度用于推进uav的推力,或分配针对uav的控制面的控制工作。13.如权利要求10所述的至少一种机器可访问存储介质,其中,uav的感测空速包括在飞行期间由uav的机载传感器感测的空速的测量。14.如权利要求10所述的至少一种机器可访问存储介质,其中,获得uav的命令速率包括将命令速率cmd_speed计算为:其中,v_xc表示uav的前向命令速度并且v_yci表示uav的横向命令惯性速度,所述横向命令惯性速度被计算为沿着uav的命令路径指向的命令惯性速度的横向分量。15.如权利要求14所述的至少一种机器可访问存储介质,还提供指令,所述指令在由控制系统执行时将使uav执行进一步的操作,所述进一步的操作包括:当uav以巡航模式操作时,将前向命令速度设置为与uav的巡航模式相关联的固定值。16.如权利要求15所述的至少一种机器可访问存储介质,还提供指令,所述指令在由控制系统执行时将使uav执行进一步的操作,所述进一步的操作包括:当uav以无人机任务的悬停模式操作时,将前向命令速度设置为uav的前向命令惯性速度,所述前向命令惯性速度被计算为沿着uav的命令路径指向的命令惯性速度的前向分量。17.一种无人飞行器uav,包括:控制面,影响uav的俯仰、偏航或滚转中的一个或多个;推进单元,推动uav;传感器,测量uav的空速并且作为响应输出uav的感测空速;以及控制系统,耦合到控制面、推进单元和传感器,所述控制系统包括逻辑,所述逻辑在由所述控制系统执行时,使uav执行操作,所述操作包括:获得uav的命令速率,所述命令速率表示以相对于uav正在飞行穿过的气团或uav正在其上方飞行的地球的给定速率飞行uav的命令;以及当命令速率大于感测空速时,使用命令速率代替感测空速来通知uav的飞行控制决策,其中,所述飞行控制决策包括调度用于推进单元的推力或分配针对控制面的控制工作中的至少一个。18.如权利要求17所述的uav,其中,所述控制系统包括进一步的逻辑,所述进一步的逻辑在由控制系统执行时,使uav执行进一步的操作,所述进一步的操作包括:当感测空速大于命令速率时,使用感测空速而不是命令速率来通知uav的飞行控制决策。19.如权利要求17所述的uav,其中,获得用于uav的命令速率包括将命令速率cmd_speed计算为:其中,v_xc表示uav的前向命令速度并且v_yci表示uav的横向命令惯性速度,所述横向命令惯性速度被计算为沿着uav的命令路径指向的命令惯性速度的横向分量。20.如权利要求19所述的uav,其中,所述控制系统包括进一步的逻辑,所述进一步的逻
辑在由控制系统执行时,使uav执行进一步的操作,所述进一步的操作包括:当uav以巡航模式操作时,将前向命令速度设置为固定值;以及当uav以无人机任务的悬停模式操作时,将前向命令速度设置为uav的前向命令惯性速度,所述前向命令惯性速度被计算为沿着uav的命令路径指向的命令惯性速度的前向分量。
技术总结
一种用于控制无人飞行器(UAV)的技术包括:监视UAV的感测空速;获得UAV的命令速率,其中,所述命令速率表示以相对于气团或地球的给定速率飞行UAV的命令;以及当命令速率大于感测空速时,使用命令速率代替感测空速来通知UAV的飞行控制决策。UAV的飞行控制决策。UAV的飞行控制决策。
技术研发人员:K
受保护的技术使用者:WING航空有限责任公司
技术研发日:2020.09.30
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。