1.本发明涉及天线伺服技术领域,特别是指一种基于数字引导的管道涵盖动态跟踪捕获方法。
背景技术:
2.在航天测控和高空高速飞行器测控中,由于gnss时延导致目标定位数据不准确等原因,会造成系统解算出来的数字引导信息存在有很大的偏差。这种偏差会导致在数字引导工作方式下,天线指向偏离目标(滞后目标,波束窄的天线导致第二旁瓣指向目标),无法转单脉冲跟踪。目标飞远时下行信号衰落很快,数引数据有偏差,天线不能正对目标,导致接收链路信息中断,跟踪失败。
技术实现要素:
3.有鉴于此,本发明提出一种基于数字引导的管道涵盖动态跟踪捕获方法,该方法针对高精度要求的快速无人飞行器数据链天线伺服系统,在普通数字引导的基础上实施了对天线两个轴向的步距叠加,从而大大提高了天线在数字引导的基础上动态捕获目标的成功率。
4.为了实现上述目的,本发明采用的技术方案为:
5.一种基于数字引导的管道涵盖动态跟踪捕获方法,其中:
6.天线工作时,按照系统数引数据引导天线在指定区域等待,一旦目标出现在天线波束内,则转向自动跟踪,保证链路的数据畅通;
7.天线等待时,伺服系统接收从下行链路解算的agc电平,判断天线是否指向目标,由于引导存在偏差,在数字引导基础上增加双维搜索,即在数字引导指向数据的基础上在方位、俯仰两个轴向叠加步进搜索,使得天线的指向不再是一条线型轨迹,而是一条以引导值为基础的一种管道涵盖,从而动态地扩大了天线波束宽度;其中,搜索步距根据实际使用的天线口径和工作频段进行设定,搜索速度以天线转动轴运动速度的最大值为依据进行设定。
8.进一步的,在管道涵盖范围内时,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪。
9.进一步的,搜索步距s的取值范围为:
[0010][0011][0012]
式中,θ
0.5
为天线半功率波束宽度,λ为天线波长,d为天线直径;
[0013]
搜索速度v
s
的取值范围为:
[0014][0015]
v
max
为天线转动轴的最大速度。
[0016]
一种基于数字引导的管道涵盖动态跟踪捕获方法,其包括以下步骤:
[0017]
步骤1:天线伺服系统基于数字引导,在指定区域等待目标出现,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤2;
[0018]
步骤2:在方位轴向上叠加步进搜索,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤3;
[0019]
步骤3:在俯仰轴向上叠加步进搜索,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤2;
[0020]
步进搜索的搜索步距s的取值范围为:
[0021][0022][0023]
式中,θ
0.5
为天线半功率波束宽度,λ为天线波长,d为天线直径;
[0024]
步进搜索的搜索速度v
s
的取值范围为:
[0025][0026]
v
max
为天线转动轴的最大速度。
[0027]
本发明的有益效果在于:
[0028]
1、本发明在数字引导基础上实施了对天线两个轴向的数引值的步距叠加,从而使天线搜索目标的运动包络为“管道”形态,因此本方法为一种管道涵盖捕获方法,该方法相当于动态地扩大了天线波束宽度,适用于对目标的跟踪有高精度要求的场景。
[0029]
2、发明通过在天线运动过程中适时的判断接收到的误差电压和agc,可使天线在满足设定的跟踪条件时自动转入自动跟踪工作模式。
[0030]
附图发明
[0031]
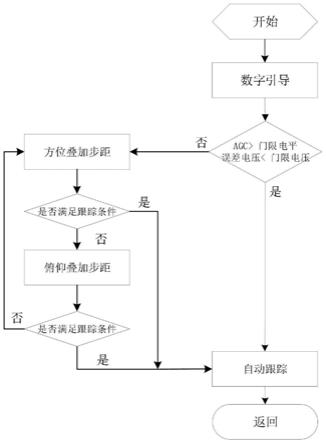
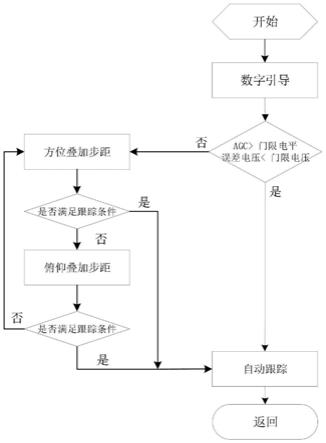
图1为本发明实施例方法的流程图。
具体实施方式
[0032]
下面结合附图和具体实施方式对本发明作进一步的详细说明。
[0033]
如图1所示,一种基于数字引导的管道涵盖动态跟踪捕获方法,该方法的原理为:
[0034]
天线工作中,虽然有既定的目标区域,但目标来向具有不确定性,因此本方法首先按照系统数引数据引导天线在指定区域等待,一旦目标出现在天线波束内,则快速地转向自动跟踪,保证链路的数据畅通,保证任务顺利执行。
[0035]
在等待过程中,伺服系统接收从下行链路解算的agc电平,判断天线是否指向目标(当天线指向目标时,目标距离不同,下行链路解算的agc电平是不同的)。由于引导存在偏差,为了更大概率捕获目标,本方法在等待点,在数字引导基础上增加了双维搜索,即在数字引导指向数据的基础上在方位、俯仰两个轴向叠加步进搜索,使得天线的指向不再是一
条线型轨迹,而是一条以引导值为基础的一种管道涵盖,这相当于动态地扩大了天线波束宽度。搜索步距要根据实际使用的天线口径和工作频段进行设定,搜索速度以天线转动轴运动速度的最大值为依据进行设定。
[0036]
在管道涵盖范围内,当接收到的下行链路agc电平达到捕获门槛时(即,agc电平大于设定门限,且误差电压小于设定门限),则自动转入自动跟踪。跟踪条件的设置可根据目标的远场和近场动态和以及噪声背景电平,由系统监控操作人员设定门限值。
[0037]
具体来说,本方法包括以下步骤:
[0038]
步骤1:天线伺服系统基于数字引导,在指定区域等待目标出现,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤2;
[0039]
步骤2:在方位轴向上叠加步进搜索,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤3;
[0040]
步骤3:在俯仰轴向上叠加步进搜索,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤2;
[0041]
步进搜索的搜索步距s的取值范围为:
[0042][0043][0044]
式中,θ
0.5
为天线半功率波束宽度,λ为天线波长,d为天线直径;
[0045]
步进搜索的搜索速度v
s
的取值范围为:
[0046][0047]
v
max
为天线转动轴的最大速度。
[0048]
总之,本发明针对高精度要求的快速无人飞行器数据链天线伺服系统,在普通数字引导的基础上实施了对天线两个轴向的步距叠加,从而大大提高了天线在数字引导的基础上动态捕获目标的成功率。
技术特征:
1.一种基于数字引导的管道涵盖动态跟踪捕获方法,其特征在于,天线工作时,按照系统数引数据引导天线在指定区域等待,一旦目标出现在天线波束内,则转向自动跟踪,保证链路的数据畅通;天线等待时,伺服系统接收从下行链路解算的agc电平,判断天线是否指向目标,由于引导存在偏差,在数字引导基础上增加双维搜索,即在数字引导指向数据的基础上在方位、俯仰两个轴向叠加步进搜索,使得天线的指向不再是一条线型轨迹,而是一条以引导值为基础的一种管道涵盖,从而动态地扩大了天线波束宽度;其中,搜索步距根据实际使用的天线口径和工作频段进行设定,搜索速度以天线转动轴运动速度的最大值为依据进行设定。2.根据权利要求1所述的一种基于数字引导的管道涵盖动态跟踪捕获方法,其特征在于,在管道涵盖范围内时,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪。3.根据权利要求1所述的一种基于数字引导的管道涵盖动态跟踪捕获方法,其特征在于,搜索步距s的取值范围为:于,搜索步距s的取值范围为:式中,θ
0.5
为天线半功率波束宽度,λ为天线波长,d为天线直径;搜索速度v
s
的取值范围为:v
max
为天线转动轴的最大速度。4.一种基于数字引导的管道涵盖动态跟踪捕获方法,其特征在于,包括以下步骤:步骤1:天线伺服系统基于数字引导,在指定区域等待目标出现,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤2;步骤2:在方位轴向上叠加步进搜索,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤3;步骤3:在俯仰轴向上叠加步进搜索,若接收到的下行链路agc电平大于设定门限,且误差电压小于设定门限,则转入自动跟踪,否则转到步骤2;步进搜索的搜索步距s的取值范围为:步进搜索的搜索步距s的取值范围为:式中,θ
0.5
为天线半功率波束宽度,λ为天线波长,d为天线直径;步进搜索的搜索速度v
s
的取值范围为:v
max
为天线转动轴的最大速度。
技术总结
本发明公开了一种基于数字引导的管道涵盖动态跟踪捕获方法,属于天线伺服技术领域。本发明针对高精度要求的快速无人飞行器数据链天线伺服系统,在普通数字引导的基础上实施了对天线两个轴向的步距叠加,从而大大提高了天线在数字引导的基础上动态捕获目标的成功率。率。率。
技术研发人员:任学民 刘建兵 张鑫波 魏英杰 郭本侃
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:2021.09.16
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。