技术特征:
1.一种系统,包括:两个或更多个传感器;一个或多个处理器;以及存储器,其存储处理器可执行指令,所述指令在由所述一个或多个处理器执行时使所述系统执行以下操作,包括:接收与所述两个或更多个传感器中的至少一个相关联的第一传感器类型相关联的第一传感器数据;接收与所述两个或更多个传感器中的至少一个相关联的第二传感器类型相关联的第二传感器数据;至少部分地基于所述第一传感器数据确定第一当前占用图以及第一预测占用图,所述第一预测占用图包括指示其相应部分被占用的可能性的离散化网格;至少部分地基于所述第二传感器数据确定第二当前占用图以及第二预测占用图,其中:所述第一当前占用图和所述第二当前占用图指示环境的一部分在当前时间被占用的第一可能性和第二可能性;以及所述第一预测占用图和所述第二预测占用图指示所述环境的所述部分在未来时间被占用的第三可能性和第四可能性;将所述第一当前占用图和所述第二当前占用图组合至指示所述环境的所述部分在所述当前时间被占用还是未被占用的数据结构中;将所述第一预测占用图和所述第二预测占用图组合至指示所述环境的所述部分在所述未来时间被占用还是未被占用的所述数据结构中;以及至少部分地基于所述数据结构控制自主车辆。2.根据权利要求1所述的系统,其中,所述操作还包括:至少部分地基于所述数据结构确定至少与最近物体相关联的第一位置或第一速度中的至少一个;以及接收轨迹,其中,控制所述自主车辆还包括:至少部分地基于所述第一位置或所述第一速度中的至少一个以及与所述自主车辆相关联的第二位置或第二速度中的至少一个来确定:控制所述自主车辆执行所述轨迹,或控制所述自主车辆执行或有轨迹。3.根据权利要求2所述的系统,其中,控制所述自主车辆执行或有轨迹至少部分地基于以下中的至少一项:确定所述轨迹位于所述数据结构中被指示为被占用的至少一部分的阈值距离内,或者至少部分地基于所述轨迹确定所述数据结构的部分的概率总和。4.根据权利要求1至3中任一项所述的系统,其中:确定所述第一占用图包括将所述第一传感器数据作为输入提供至第一机器学习(ml)模型并接收作为来自所述第一ml模型的输出的所述第一占用图;以及确定所述第二占用图包括将所述第二传感器数据作为输入提供至第二机器学习(ml)模型并接收作为来自所述第二ml模型的输出的所述第二占用图。5.根据权利要求1至4中任一项所述的系统,其中:
所述第一当前占用图包括与所述环境的所述部分相关联的第一置信度分数,所述第一置信度分数指示所述部分被占用的第一可能性;所述第二当前占用图包括与所述环境的所述部分相关联的第二置信度分数,所述第二置信度分数指示所述部分被占用的第二可能性;以及至少部分地基于所述第一置信度分数、所述第二置信度分数、所述第一传感器类型或所述第二传感器类型中的至少一个,将所述第一当前占用图和所述第二当前占用图组合到所述数据结构中。6.根据权利要求5所述的系统,其中,所述操作还包括:至少部分地基于确定所述第一置信度分数达到或超过阈值置信度,将所述第一当前占用图的第一部分关联为指示所述部分被占用;以及其中,将所述第一当前占用图和所述第二当前占用图组合到所述数据结构中还包括:至少部分地基于所述第一部分和与所述第二当前占用图相关联的指示所述部分被占用或未被占用的第二部分中的至少一个进行投票。7.一种方法,包括:接收与第一传感器类型相关联的第一传感器数据;接收与第二传感器类型相关联的第二传感器数据;至少部分地基于所述第一传感器数据确定第一占用图,其中,所述第一占用图指示自主车辆周围的环境的一部分在未来时间被占用还是未被占用,至少部分地基于所述第二传感器数据确定第二占用图,其中,所述第二占用图指示所述部分在所述未来时间被占用还是未被占用;至少部分地基于所述第一占用图和所述第二占用图将所述第一占用图和所述第二占用图组合至数据结构中,其中,所述数据结构指示所述环境的所述部分在所述未来时间被占用还是未被占用;以及至少部分地基于所述数据结构控制所述自主车辆。8.根据权利要求7所述的方法,还包括:至少部分地基于所述数据结构,确定至少与最近物体相关联的第一位置或第一速度中的至少一个;以及接收轨迹,其中,控制所述自主车辆还包括至少部分地基于所述第一位置或所述第一速度中的至少一个以及与所述自主车辆相关联的第二位置或第二速度中的至少一个来确定:控制所述自主车辆执行所述轨迹,或控制所述自主车辆以执行或有轨迹。9.根据权利要求8所述的方法,其中,控制所述自主车辆执行或有轨迹至少部分地基于以下一项或多项:确定所述轨迹位于所述数据结构中被指示为被占用的至少一部分的阈值距离内,或者至少部分地基于所述轨迹确定与所述数据结构相关联的概率总和。10.根据权利要求7至9中任一项所述的方法,其中:确定所述第一占用图包括将所述第一传感器数据作为输入提供至第一机器学习(ml)模型并接收作为来自所述第一ml模型的输出的所述第一占用图;以及确定所述第二占用图包括将所述第二传感器数据作为输入提供至第二机器学习(ml)
模型并接收作为来自所述第二ml模型的输出的所述第二占用图。11.根据权利要求7至10中任一项所述的方法,其中:所述第一当前占用图包括与所述环境的所述部分相关联的第一置信度分数,所述第一置信度分数指示所述部分被占用的第一可能性;所述第二当前占用图包括与所述环境的所述部分相关联的第二置信度分数,所述第二置信度分数指示所述部分被占用的第二可能性;以及将所述第一当前占用图和所述第二当前占用图聚合到所述数据结构中包括:至少部分基于确定所述第一置信度分数达到或超过阈值置信度,将所述第一当前占用图的第一部分关联为指示所述部分被占用。12.根据权利要求11所述的方法,其中,将所述第一当前占用图和所述第二当前占用图聚合到所述数据结构中还包括:至少部分地基于所述第一部分和与所述第二当前占用图相关联的指示所述部分被占用或未被占用的第二部分、所述第一传感器类型、所述第二传感器类型、所述第一置信度分数或所述第二置信度分数中的至少一个进行投票以将所述数据结构的第二部分关联为指示所述部分被占用。13.根据权利要求7至12中任一项所述的方法,其中:所述第一传感器数据和所述第二传感器数据包括当前传感器数据和先前传感器数据;以及所述第一占用图至少包括与当前时间相关联的当前占用图以及与未来时间相关联的预测占用图。
技术总结
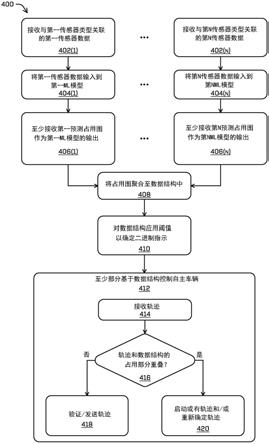
一种碰撞避免系统可以验证、拒绝或替换(416、418、420)为控制车辆而生成的轨迹。碰撞避免系统可以包括次要感知部件,该次要感知部件可以包括一个或多个机器学习模型,每个模型可以被训练为至少部分地基于不同类型的传感器数据(402(1)-402(N))输出一个或多个占用图(406(1)-406(N))。占用图可以包括对环境的至少一部分在未来时间是否被多种物体类型中的任何一种占用的预测。可以将与同一时间相关联的占用图聚合(408)到可以用于验证、拒绝或替换轨迹(416、418、420)的数据结构中。420)的数据结构中。420)的数据结构中。
技术研发人员:J
受保护的技术使用者:祖克斯有限公司
技术研发日:2020.09.30
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。