1.本公开涉及一种电流感测校正方法,尤指一种用于驱动系统的电流感测校正方法。
背景技术:
2.由磁电转换元件所构成的电流感测器,例如霍尔感测器(hall sensor)等,已常见于用来驱动例如马达的负载装置的驱动系统中,电流感测器可检测驱动系统所输出的三相电流,以产生对应的电压检测信号,使驱动系统依据电压检测信号而对应调整三相电流。
3.请参阅图1及图2a,其中图1为传统驱动系统所输出的三相电流中的任意两相的电流时序图,图2a为电流感测器的磁感应强度-磁场强度(b-h)的曲线示意图。如图1及图2a所示,以负载装置为电梯的马达为例,当电梯到达对应的楼层且机械刹车装置固定马达前,驱动系统需输出直流状态的三相电流让马达产生转矩来支撑负载,以致于马达维持零转速。如此一来,电梯即可停留在对应的楼层。因此驱动系统所输出的三相电流中的任意两相的电流,例如a相电流ia及b相电流ib便如图1所示。如图1所示,在电梯的马达持续输出转矩且维持转速维持为零时,驱动系统输出的三相电流(例如:a相电流ia及b相电流ib)会有一段时间维持直流状态直到机械刹车装置固定住马达。当机械刹车装置固定住马达时,驱动系统停止输出三相电流。
4.另外,在电梯的马达正常运行前,马达会先进入启动状态。当马达进入启动状态且机械刹车装置释放马达前,马达仍然被机械刹车装置固定而停止。相同地,机械刹车装置释放马达后,驱动系统需提供三相电流给马达,使马达产生输出转矩平衡负载转矩进行零速控制,以维持电梯车厢停靠在对应楼层。此时三相电流维持直流状态。当马达开始正常运行时,三相电流则为交流状态。
5.又由于磁电转换元件所构成的电流感测器的特性如图2a示,即当电流感测器接收维持直流状态的三相电流值为零时,电流感测器上因直流电流产生的磁场而存在剩磁(residual magnetization),如图中标示的a点或a1点,导致电流感测器在零电流时产生的电压检测信号会反映出因剩磁现象所导致的电压偏移的暂时现象。而此电压偏移的暂时现象,容易造成控制器读取电流感测器的电流值时产生严重的误差。
6.图2b为电流感测器读取电流的大小的示意图。请同时参阅图2a及图2b。假设电流感测器上的剩磁为a曲线,该剩磁可能造成电流感测器产生读取值v1。然而,实际上,电流感测器上的电流信号应该为零,所以电流感测器不应该产生任何读取值。同样地,假设电流感测器上的剩磁为a1曲线,该剩磁可能造成电流感测器产生读取值v2。由此可知,当电流感测器接收到电流信号时,电流感测器产生的读取值具有严重的误差。
7.另外,驱动系统在驱动负载装置暂时停止后,必须读取电流感测器的电压检测信号,以进行三相电流的电流偏移校正,而电流偏移校正的目的乃是对两个已知且可事先预测的电流偏移成因进行补偿,第一个成因为因驱动系统内的控制单元仅能读取正值信号,故而需对电流感测器的检测结果加入预设的电压偏移值,使控制单元所接收到的电流感测
器的检测结果皆为正值;第二个成因为电流感测器的温度飘移对感测结果所造成的电压偏移。其中上述第一个成因及第二个成因皆可通过无电流输出时,检测电流感测器的电压信号进行校正,故可在驱动系统进行三相电流的电流偏移校正时进行正确的补偿。
8.然而由于电流感测器的剩磁效应,故驱动系统在停止驱动而进行三相电流的电流偏移校正时,其从电流感测器所读取的检测结果实包含了剩磁造成的误差,又剩磁造成的误差为暂时性且无法事先预测,导致驱动系统的电流偏移校正有所误差而无法准确,如此一来,将影响了驱动装置的驱控性能,使得驱动系统在驱动负载装置并进行电流控制时,产生与驱动频率相同的电流涟波,进而产生振动及噪音。
9.因此,实有必要发展一种改良的电流感测校正方法及驱动系统,以解决上述现有技术所面临的问题。
技术实现要素:
10.本公开的目的在于提供一种电流感测校正方法及驱动系统,从而解决传统驱动系统在进行电流偏移校正时,会因电流感测器的剩磁的效应,导致无法准确校正,进而影响了驱动系统的驱控性能,使得负载装置在运行时产生振动及噪音。
11.为达上述目的,本公开提供一种电流感测校正方法,用于驱动系统,其中驱动系统包含驱动单元、控制单元、测量单元及存储单元。驱动单元用以提供三相电流给负载装置。该控制单元执行电流感测校正方法,且电流感测校正方法包括:通过测量单元取得三相电流的检测值;依据检测值判断三相电流是否维持直流状态;如果三相电流维持直流状态,则通过该测量单元取得三相电流的直流值并记录直流值于存储单元以作为三相去磁值;其中当控制单元判断检测值为零时,电流感测校正方法还包括:依据三相去磁值计算d轴电流及q轴电流;依据比例常数、d轴电流及q轴电流计算d轴校正电流命令及q轴校正电流命令;依据d轴校正电流命令及q轴校正电流命令运行驱动单元以产生三相去磁电流给测量单元;判断测量单元接收三相去磁电流的去磁时间是否达到第一预定时间;其中当去磁时间达到第一预定时间时,控制驱动单元以停止产生三相去磁电流。
12.为达上述目的,本公开另提供一种驱动系统,包括:驱动单元、控制单元、测量单元及存储单元。驱动单元用以提供三相电流给负载装置。测量单元用以测量三相电流以输出三相电流的检测值。控制单元耦接驱动单元、测量单元及存储单元。控制单元依据检测值判断三相电流是否维持直流状态。当控制单元判断三相电流维持直流状态时,控制单元通过该测量单元取得三相电流的直流值,并记录直流值于存储单元以作为三相去磁值。当控制单元判断检测值为零时,控制单元依据三相去磁值计算d轴电流及q轴电流,并且控制单元还依据比例常数、该d轴电流及该q轴电流计算d轴校正电流命令及q轴校正电流命令。控制单元依据d轴校正电流命令及q轴校正电流命令运行驱动单元以产生三相去磁电流给测量单元。
附图说明
13.图1为传统驱动系统所输出的三相电流中的任意两相的电流时序图;
14.图2a为电流感测器的磁感应强度-磁场强度(b-h)的曲线示意图;
15.图2b为电流感测器读取电流的大小的示意图;
16.图3a为本公开优选实施例的驱动系统1的电路方框示意图;
17.图3b为本公开优选实施例的连接于驱动系统1的负载装置9的运行速度的波形图;
18.图3c为本公开优选实施例的连接于驱动系统1的三相电流的波形图
19.图4为传统驱动系统所输出的三相电流进行dq轴坐标转换后所呈现的q轴电流及本公开的驱动系统1所输出的三相电流ia、ib、ic进行dq轴坐标转换后所呈现的q轴电流;
20.图5为本公开的驱动系统1的电流谐波与振动频率及传统驱动系统的电流谐波与振动频率的波形示意图;
21.图6为本公开优选实施例的电流感测校正方法的步骤流程示意图。
22.其中,附图标记说明如下:
23.1:驱动系统
24.2:驱动单元
25.3:测量单元
26.4:存储单元
27.5:控制单元
28.ia、ib、ic:三相电流
29.iat、ibt、ict:三相电流的检测值
30.20:整流电路
31.c:总线电容
32.21:变频器
33.300:电流感测校正方法
34.s1~s13:电流感测校正方法的步骤
具体实施方式
35.体现本公开特征与优点的一些典型实施例将在后段的说明中详细叙述。应理解的是本公开能够在不同的态样上具有各种的变化,其皆不脱离本公开的范围,且其中的说明及附图在本质上当作说明之用,而非架构于限制本公开。
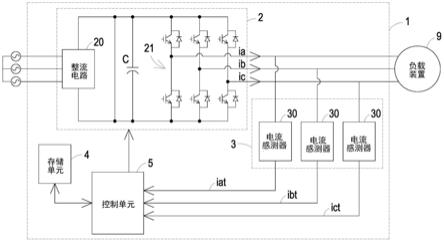
36.请参阅图3a,其为本公开优选实施例的驱动系统1的电路结构方框示意图。如图3a所示,本公开的驱动系统1可用来驱动负载装置9,其中负载装置9可为但不限于电梯的马达。驱动系统1包含驱动单元2、测量单元3、存储单元4及控制单元5。驱动单元2与负载装置9电连接,驱动单元2可接收输入电流并进行转换,以提供三相电流ia、ib、ic给负载装置9,进而驱动负载装置9进入运行状态,另外,驱动单元2亦可驱动负载装置9进入待机状态。于一些实施例中,驱动单元2可为但不限于包含整流电路20、总线电容c及变频器21,其中因应输入电流为单相输入电流或三相输入电流,整流电路20可为单向整流电路或三相整流电路,而变频器21可包含多个开关元件。由于整流电路20、总线电容c及变频器21的电路架构以及作动已常见于电子电路领域中,于此不再赘述。
37.测量单元3用以测量驱动单元2输出的三相电流ia、ib、ic,以输出三相电流ia、ib、ic的检测值iat、ibt、ict,即如图3a所示。于一些实施例中,测量单元3可包含为磁电转换元件所构成的电流感测器30,例如霍尔感测器,且电流感测器30的个数可为三个,以分别测量三相电流ia、ib、ic,且三相电流ia、ib、ic分别皆为单相电流(于此统称三相电流)。当然,由
于可由两个电流感测器所测量到的其中两相电流的直流检测值推得剩余的单相电流,故于其它实施例中,测量单元3亦可仅包含两个电流感测器30,以测量三相电流ia、ib、ic的第一相电流及第二相电流,而控制单元5依据第一相电流及第二相电流计算出三相电流ia、ib、ic的第三相电流。特别注意,第一至第三相电流可以依据需求任意搭配a相电流ia、b相电流ib和c相电流ic,但本发明不限于此。
38.存储单元4可用来存储测量单元3所输出的直流检测值。于一些实施例中,存储单元4可为但不限于非易失性的存储器(non-volatile memory),例如快闪存储器(flash memory)、可抹除及可编程的只读存储器(eprom)、可电抹除及可编程的只读存储器(eeprom)或硬盘(hard disk)等。
39.控制单元5耦接驱动单元2、测量单元3及存储单元4,控制单元5用以控制驱动系统1的整体运行,其中控制单元5可输出控制命令至驱动单元2,使驱动单元2运行变频器21以输出三相电流ia、ib、ic来驱动负载装置9。于一些实施例中,控制单元5可为但不限于微控制器(controller)、处理器(processor)、中央处理单元(cpu)等。
40.图3b为本公开优选实施例的连接于驱动系统1的负载装置9的转速的波形图。图3c为本公开优选实施例的连接于驱动系统1的三相电流的波形图。于图3c中,为了清楚地描绘波形,故仅示出a相电流ia作为代表。
41.特别注意的是,为了方便说明本发明的运行原理。本发明以包含马达的电梯系统作为范例说明,但本发明不限于此。在一般的电梯系统包括:电梯车厢(未图示)、马达、刹车装置(未图示)等。另外,以下各个实施例中所述的马达即为图3a中的负载装置9,但本发明不限于此。
42.如图3a所示,驱动系统1输出三相电流(如:a相电流ia、b相电流ib、c相电流ic)给马达以后,马达依据三相电流来移动电梯车厢。另外,刹车装置是用来固定住马达,使得电梯车厢停留在指定楼层。以下请同时参阅图3a~图3c,来说明以下各个实施例。
43.于图3b及图3c的区间1时,当电梯车厢接近指定的对应楼层时,控制单元5控制驱动单元2以减少交流状态的三相电流(ia、ib、ic)的频率。如此一来,马达的转速会逐渐下降,如图3b的区间1所示。
44.当电梯刚到达指定的对应楼层时,控制单元5控制驱动单元2以产生维持直流状态的三相电流(ia、ib、ic),如图3c的区间2所示。此时,马达依据维持直流状态的三相电流(ia、ib、ic)产生力矩,以支撑住电梯车厢的重量。由于马达产生的力矩与电梯车厢的重量达到力平衡,所以马达的转速为零,如图3b的区间2所示。本领域的通常知识者称之为:马达的零转速控制。特别注意的是,于区间1及区间2时,电梯系统的刹车装置没有固定住马达(刹车装置未启动)。在一般的情况,当电梯刚到达指定的对应楼层时,由于电梯车厢还未确定与指定楼层对齐(或称:平层),因此,需要进行马达的零转速控制,使得电梯能够停留在指定楼层以进行电梯车厢的位置微调来达到平层。
45.于图3b及图3c的区间2中,控制单元5依据检测值(iat、ibt、ict)判断三相电流(ia、ib、ic)是否维持直流状态。其中如果控制单元5判断三相电流(ia、ib、ic)没有维持直流状态而恢复为交流状态(其代表马达没有进行零转速控制),则控制单元5继续接收检测值(iat、ibt、ict)。反之,如果控制单元5判断三相电流(ia、ib、ic)维持直流状态(其代表马达进行零转速控制),则控制单元5通过测量单元3取得维持直流状态的三相电流(ia、ib、
ic)的直流值。接着,控制单元5记录上述直流值于存储单元4以供电流感测器30去磁程序使用,控制单元5将存储于存储单元4的直流值作为三相去磁值。
46.于图3c的区间2中,维持直流状态的三相电流(ia、ib、ic)是主要造成测量单元3中的电流感测器30产生剩磁的主要原因。也就是说,剩磁影响电流感测器30的程度,与上述三相去磁值的大小有直接的关联性。上述三相去磁值主要就是造成电流感测器30无法准确测量三相电流(ia、ib、ic)的主因。
47.当控制单元5判断三相电流(ia、ib、ic)的检测值(iat、ibt、ict)为零时,控制单元5判断刹车装置固定住马达(马达转速必为零且三相电流(ia、ib、ic)趋近于零),如于图3b及图3c的区间3所示。因此,控制单元5判断马达进入待机状态。
48.因此,于图3c的区间3中,当控制单元5判断三相电流(ia、ib、ic)的检测值(iat、ibt、ict)为零时,控制单元5依据存储于存储单元4中的三相去磁值计算d轴电流及q轴电流。接着,控制单元5还依据一比例常数、d轴电流及q轴电流计算d轴校正电流命令及q轴校正电流命令。当控制单元5完成计算d轴校正电流命令及q轴校正电流命令之后,图3c的区间3结束。
49.接着,进入图3c的区间4,控制单元5依据d轴校正电流命令及q轴校正电流命令运行驱动单元2以产生三相去磁电流给该测量单元3。接着控制单元5判断测量单元3接收三相去磁电流的一去磁时间是否达到第一预定时间。其中上述的第一预定时间为图3c的区间4(1.5秒~2秒),但本发明不限于此。特别注意的是,第一预定时间为软件设定值,本发明可依据实际的情况作弹性地调整。
50.其中当控制单元5判断去磁时间到达第一预定时间时,控制单元5控制驱动单元2以停止产生三相去磁电流。接着,当控制单元5判断去磁时间到达第一预定时间时,进入图3c的区间5,控制单元5通过测量单元3测量三相电流(ia、ib、ic)以作为三相电流校正值。于此实施例中,在测量单元3接收三相去磁电流以去除剩磁现象之后,测量单元3所测量的三相电流(ia、ib、ic)即可视为电流读取值的偏移量(例如:图2b的v1或v2)。。
51.接着,进入图3c的区间5,控制单元5判断三相电流校正值维持不变的一校正时间是否达到一第二预定时间。其中上述的第二预定时间为图3c的区间5(2秒~2.5秒),但本发明不限于此。特别注意的是,第二预定时间为软件设定值,本发明可依据实际的情况作弹性地调整。其中当校正时间达到第二预定时间时,控制单元5存储三相电流校正值于存储单元4。反之,如果校正时间没有达到第二预定时间,则控制单元5继续判断三相电流校正值。
52.接着,进入图3c的区间6,当电梯车厢准备启动至下一个指定楼层时,刹车装置由固定住马达改变为释放马达。当刹车装置没有固定住马达(刹车装置未启动)时,控制单元5先进行马达的零转速控制。当进行马达的零转速控制时,控制单元5接收三相电流(ia、ib、ic)的检测值(iat、ibt、ict)以判断马达(负载装置9)进入运行状态。此时,控制单元5通过测量单元3取得三相电流(ia、ib、ic)的检测值,并且控制单元5自存储单元4中撷取该三相电流(ia、ib、ic)校正值。接着。控制单元5将工作值与存储单元4中的该三相电流校正值进行相减以取得三相电流(ia、ib、ic)的实际值,并且控制单元5依据该实际值操作驱动单元2。
53.在图3c的区间6之后,三相电流(ia、ib、ic)为交流状态。也就是说,在图3c的区间6之后,马达进行运行来移动电梯车厢。此时,控制单元5同样地取得三相电流(ia、ib、ic)的
检测值,且将检测值与存储单元4中的该三相电流校正值进行相减以取得三相电流(ia、ib、ic)的实际值,并且控制单元5依据该实际值操作驱动单元2以调整交流状态的三相电流(ia、ib、ic)的频率或振幅,但本发明不限于此。
54.在优选的实施例中,在刹车装置固定马达前,控制单元5撷取维持直流状态的三相电流(ia、ib、ic)的最后一个值,例如:撷取位于图3c的区间2的第1秒的三相电流(ia、ib、ic)的值,以作为上述三相去磁值。因此,在优选的实施例中,于图3c的区间2中,控制单元5不断地将维持直流状态的三相电流(ia、ib、ic)的直流值存储于存储单元4。当进入图3c的区间3时,控制单元5撷取最后一笔存储于存储单元4的直流值,来作为三相去磁值,且经由上述的操作过程进行去磁及校正。如此,可以明显地增加电流感测器30的准确度。
55.本领域的普通技术人员可理解到:控制单元5可依三相电流的实际值对应产生脉宽信号至驱动单元2,以控制驱动单元2的变频器21的多个开关元件的切换运行来产生交流状态的或直流状态的三相电流(ia、ib、ic)。另外,本领域的普通技术人员可理解到:控制单元5还依据d轴校正电流命令及q轴校正电流命令产生脉宽信号至驱动单元2,以控制驱动单元2的变频器21的多个开关元件的切换运行来产生三相去磁电流。因此,本发明不再赘述。
56.在其他一些实施例中,本发明也可运用于其他具有交/直流电流切换的系统,例如:物联网系统(internet of things system,iot system)、电网系统(smart grid system)等,但本发明不限于此。
57.以下将约略说明控制单元5的运算原理。对本领域的普通技术人员可利用方程式(1)依据三相电流ia、ib、ic计算d轴电流id及q轴电流iq,其中方程式(1)如下所示:
[0058][0059]
其中,为静止坐标轴转换至旋转坐标轴的转换矩阵,θe为转子位置。
[0060]
因此,当负载装置9进入零转速控制时,控制单元5将维持直流状态的三相电流ia、ib、ic的直流值作为三相去磁值,并依据三相去磁值计算出的d轴电流id及q轴电流iq可表示如下方程式(2):(其中将三相去磁值i
a_stop
、i
b_stop
及i
c_stop
代入方程式(1),即可以取得方程式(2))
[0061][0062]
其中i
d_stop
及i
q_stop
为控制单元5所分别计算出的d轴电流的电流值及q轴电流的电流值,i
a_stop
、i
b_stop
及i
c_stop
分别为三相去磁值的大小。
[0063]
再者,控制单元5依据比例常数、d轴电流及q轴电流计算d轴校正电流命令及q轴校正电流命令,其中d轴校正电流命令i
*d_demag
及q轴校正电流命令i
*q_demag
表示如下方程式(3):
[0064][0065]
其中k
demag
为比例常数。
[0066]
又控制单元5依据d轴校正电流命令及q轴校正电流命令运行运驱动单元2,使驱动单元2激励负载装置9产生三相去磁电流给测量单元3,其中三相去磁电流i
*a_demag
、i
*b_demag
及i
*c_demag
可由下述方程式(4)及(5)求得:
[0067][0068][0069]
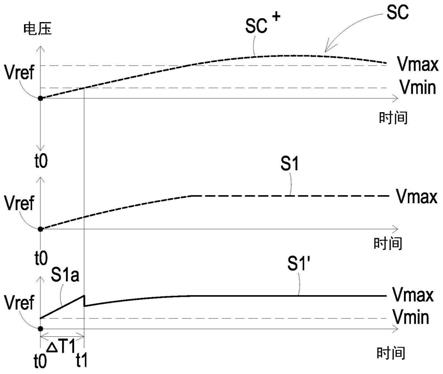
请参阅图4及图5,其中图4为本公开的驱动系统所输出的三相电流进行dq轴坐标转换后所呈现的q轴电流及传统驱动系统所输出的三相电流进行dq轴坐标转换后所呈现的q轴电流的时序示意图,图5为本公开的驱动系统的电流谐波与振动频率及传统驱动系统的电流谐波与振动频率的波形示意图。如图4及图5所示,由于本公开的驱动系统1会激励负载装置9产生三相去磁电流给测量单元3,借此对测量单元3进行去磁,因此由图4可知,本公开的驱动系统1(如图4上方所示)相较于传统驱动系统(如图4下方所示)可有效改善输出转矩涟波问题,且由图5可知,在驱动频率相同情况下,例如皆为16.3hz,本公开的驱动系统1(例如:电梯车厢)的电流谐波(如图5上方所示的虚线)相较于传统驱动系统的电流谐波(如图5上方所示的实线)降低约56.5%,本公开的驱动系统1的振动(如图5下方所示的虚线)相较于传统驱动系统的振动谐波(如图5下方所示的实线)下降约57.8%,故本公开的驱动系统1的电流偏移校正可较为准确,使得本公开的驱动系统1的驱控性能相较于传统驱动系统的驱控性能大幅提升。
[0070]
请参阅图6,并配合图3a~图3c,其中图6为本公开优选实施例的电流感测校正方法300的步骤流程示意图。如图所示,本公开的电流感测校正方法300适用于前述实施例中的驱动系统1而用于驱动单元2,且此电流感测校正方法可由控制单元5执行。驱动系统1包含驱动单元2、控制单元5、测量单元3及存储单元4,且该驱动单元2用以提供三相电流(ia、ib、ic)给负载装置9(例如:马达),控制单元5执行电流感测校正方法300,其中电流感测校正方法300包含下列步骤。
[0071]
于步骤s1中,控制单元5通过测量单元3取得三相电流(ia、ib、ic)的检测值(iat、ibt、ict)。
[0072]
于步骤s2中,控制单元5依据三相电流(ia、ib、ic)的检测值(iat、ibt、ict)判断三相电流(ia、ib、ic)是否维持直流状态。如果三相电流(ia、ib、ic)没有维持直流状态,则控制单元5回到步骤s1。反之,如果三相电流(ia、ib、ic)维持直流状态,控制单元5继续执行步
骤s3。
[0073]
于步骤s3中,如果三相电流(ia、ib、ic)维持该直流状态,则控制单元5通过测量单元3取得三相电流(ia、ib、ic)的直流值。
[0074]
于步骤s4中,控制单元5记录上述三相电流(ia、ib、ic)的直流值于存储单元4以作为三相去磁值。
[0075]
于步骤s5中,控制单元5判断三相电流(ia、ib、ic)的检测值(iat、ibt、ict)是否为零。当控制单元5判断三相电流(ia、ib、ic)的检测值(iat、ibt、ict)为零时(其代表刹车装置启动以固定住马达),控制单元5继续执行步骤s6:控制单元5依据三相去磁值计算d轴电流及q轴电流。反之,于步骤s5中,当控制单元5判断三相电流(ia、ib、ic)的检测值(iat、ibt、ict)不为零,则控制单元5重复地执行步骤s3至步骤s5,以重复地记录存储单元4中的三相去磁值。
[0076]
于一些实施例中,本公开的电流感测校正方法还可包含下列步骤。
[0077]
于步骤s7中,控制单元5依据比例常数、d轴电流及q轴电流计算d轴校正电流命令及q轴校正电流命令。于此实施例中,步骤s2~s7是操作于图3b及图3c的区间2至3的范例,但本发明不限于此。
[0078]
于步骤s8中,控制单元5依据d轴校正电流命令及q轴校正电流命令运行驱动单元2以产生三相去磁电流给测量单元3(例如:图3b及图3c的区间4)。
[0079]
于步骤s9中,控制单元5判断测量单元3接收三相去磁电流的去磁时间是否达到第一预定时间。其中前述的第一预定时间即为图3c的区间4(1.5秒~2秒),但本发明不限于此。特别注意的是,第一预定时间为软件设定值,本发明可依据实际的情况作弹性地调整。
[0080]
于步骤s10中,当步骤s9的判断的结果为去磁时间达到第一预定时间时,控制单元5控制驱动单元2以停止产生三相去磁电流。而当执行完步骤s10后,即可完成对测量单元3的去磁。另外,当步骤s9的判断的结果为去磁时间未达到第一预定时间时,则重新执行步骤s8。
[0081]
于步骤s11中,当去磁时间达到第一预定时间时,控制单元5通过测量单元3测量三相电流以作为三相电流校正值(例如:图3b及图3c的区间5)。
[0082]
于步骤s12中,控制单元5判断三相电流校正值维持不变的校正时间是否达到第二预定时间(例如:图3b及图3c的区间5)。其中前述的第二预定时间为图3c的区间5(2秒~2.5秒),但本发明不限于此。特别注意的是,第二预定时间为软件设定值,本发明可依据实际的情况作弹性地调整。
[0083]
于步骤s13中,当步骤s12的判断结果为校正时间达到第二预定时间时,控制单元5存储三相电流校正值于存储单元4中。另外,当步骤s12的判断的结果为校正时间未达到第二预定时间时,则重新执行步骤s11。
[0084]
特别注意,图6及上述步骤s1~s13仅用于描述本发明的电流感测校正方法300的范例,但图6及上述步骤s1~s13的顺序,不用于限制本发明。
[0085]
综上所述,本公开提供一种电流感测校正方法及驱动系统,其中本公开的电流感测校正方法可在负载装置进入启动状态时,运行驱统系统的驱动单元以产生三相去磁电流给测量单元,借此对测量单元进行去磁,如此一来,本公开的驱动系统在进行电流偏移校正时可较为准确,故本公开的驱动系统的驱控性能可提升,进而避免负载装置在运行时产生
振动及噪音。
[0086]
须注意,上述仅是为说明本公开而提出的优选实施例,本公开不限于所述的实施例,本公开的范围由如附权利要求决定。且本公开得由熟习此技术的人士任施匠思而为诸般修饰,然皆不脱如附权利要求所欲保护者。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。