1.本公开涉及一种电源系统,尤指一种可补偿最小脉宽限制所造成的输出电压失真的电源系统及其适用的脉宽调制方法
背景技术:
2.在各种不同的工业应用上,常会使用到电源系统来进行电压的转换。电源系统包含多个晶体管,通过多个晶体管分别进行导通或断开的开关切换,电源系统便将所接收的电压转换,以提供给负载使用。
3.此外,电源系统还包含控制单元及脉宽调制单元,控制单元输出控制信号,使电源系统的输出电压可依据控制信号来对应调整,脉宽调制单元则依据控制信号产生多个脉宽信号,使多个晶体管依据对应的脉宽信号来进行开关切换。
4.电源系统的每一个晶体管通常包含寄生二极管,而二极管有反向恢复电流(reverse recovery current)的特性,即寄生二极管会在一定的时间内有着反向的电流,故若在反向恢复电流期间使对应的晶体管切换为导通,则会瞬间切断寄生二极管上的反向电流,这种突然的电流截断会在电路上造成突波电压(surge voltage),进而造成电源系统的电路元件的损坏。为了避免上述情况发生,目前大部分的电源系统都会在开关进行切换的实现上,附加最小脉宽限制技术,以确保晶体管的寄生二极管上的反向恢复电流能完整的结束。
5.然而由于电源系统附加了最小脉宽限制技术,故在最小脉宽限制的期间内,电源系统所输出的输出电压将依据最小脉宽限制而被箝制,并无法准确地追随控制单元输出的控制信号来调整,导致电源系统所输出的输出电能在最小脉宽限制的期间内存在失真的问题。
6.因此,实有必要发展一种改良的电源系统及其适用的脉宽调制方法,以解决上述现有技术所面临的问题。
技术实现要素:
7.本公开的目的在于提供一种电源系统及其适用的脉宽调制方法,从而解决传统电源系统在使用最小脉宽限制技术时,电源系统的输出电压无法在最小脉宽限制的期间内准确地依据控制单元输出的控制信号来调整,导致输出电能存在失真的问题。
8.为达上述目的,本公开的一较广实施态样为一种电源系统,包含电源转换装置及一脉宽调制装置,其中脉宽调制装置输出第一至第四驱动信号以运行电源转换装置,并且脉宽调制装置包含:控制单元,用以产生控制信号,其中控制信号为周期性信号;以及脉宽调制单元,依据参考电压电平决定控制信号的临界时间点,且依据临界时间点将控制信号区分为正周期信号及负周期信号,其中控制信号于临界时间点接近参考电压电平于误差范围内;脉宽调制单元箝位正周期信号的大于或等于最大电压阀值的部分于最大电压阀值以形成第一比较波形,并且脉宽调制单元还将正周期信号箝位于参考电压电平以作为第二比
较波形,并且脉宽调制单元取样落入临界时间点至第一预定时间的第一时间区间内的第一及第二比较波形;其中脉宽调制单元叠加低电压阀值和落入第一时间区间内的第一比较波形以形成第一斜波信号;其中脉宽调制单元叠加低电压阀值和落入第一时间区间内的第二比较波形以形成第一脉宽信号;其中于第一时间区间内,脉宽调制单元比较第一斜波信号与第一三角波以调整第一及第三驱动信号,且脉宽调制单元比较第一脉宽信号与第二三角波以调整第二及第四驱动信号,其中第一及第二三角波之间的相位差为180度。
9.为达上述目的,本公开的另一较广实施态样为一种脉宽调制方法,包括:接收控制信号,其中控制信号为周期性信号;依据参考电压电平决定控制信号的临界时间点;依据临界时间点将控制信号区分为正周期信号及负周期信号,其中控制信号于临界时间点接近参考电压电平于误差范围内;箝位正周期信号的大于或等于最大电压阀值的部分于最大电压阀值以形成第一比较波形;箝位正周期信号于参考电压电平以作为第二比较波形;取样落入临界时间点至第一预定时间的第一时间区间内的第一及第二比较波形;叠加低电压阀值和落入第一时间区间内的第一比较波形以形成第一斜波信号;叠加低电压阀值和落入第一时间区间内的第二比较波形以形成第一脉宽信号;于第一时间区间内比较第一斜波信号与第一三角波以调整第一及第三驱动信号;以及于第一时间区间内脉宽调制单元比较第一脉宽信号与第二三角波以调整第二及第四驱动信号,其中第一及第二三角波之间的相位差为180度。
附图说明
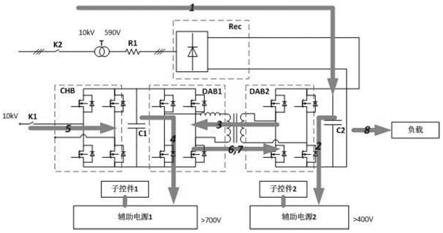
10.图1a为本公开优选实施例的电源系统1的电路方框示意图;
11.图1b为图1a所示的电源转换装置3的第一优选实施例的电路结构示意图;
12.图1c为图1a所示的电源转换装置3的第二优选实施例的电路结构示意图;
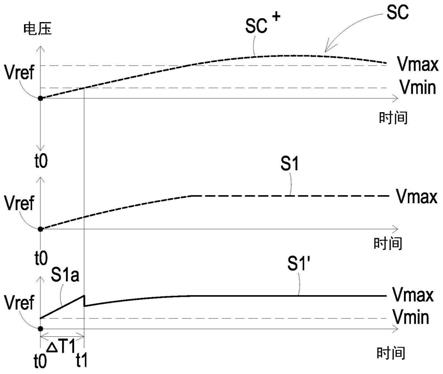
13.图2为解释图1a所示的脉宽调制单元21在运行时的信号时序图;
14.图3a为解释脉宽调制单元21产生第一斜波信号s1a及第一参考波形s1’的信号时序图;
15.图3b为解释脉宽调制单元21产生第一脉宽信号s2a及第二参考波形s2’的信号时序图;
16.图4a为在第一时间区间δt1时第一三角波epwm1、第二三角波epwm2、第一斜波信号s1a、第一脉宽信号s2a、第一驱动信号p1至第四驱动信号p4的信号时序示意图;
17.图4b为在第一时间区间δt1时第一三角波epwm1、第二三角波epwm2、第一参考波形s1’、第二参考波形s2’、第一驱动信号p1至第四驱动信号p4的信号时序示意图;
18.图5a为解释脉宽调制单元21产生第二脉宽信号s3a及第三参考波形s3’的信号时序图;
19.图5b为解释脉宽调制单元21产生第二斜波信号s4a及第四参考波形s4’的信号时序图;
20.图6a为在第二时间区间时第一三角波epwm1、第二三角波epwm2、第二脉宽信号s3a、第二斜波信号s4a、第一驱动信号p1至第四驱动信号p4的信号时序示意图;
21.图6b为在第二时间区间时第一三角波epwm1、第二三角波epwm2、第三参考波形s3’、第四参考波形s4’、第一驱动信号p1至第四驱动信号p4的信号时序示意图;
22.图7为附加了最小脉宽限制技术的传统电源系统所输出的输出电流的波形示意图;
23.图8为本公开的电源系统1所输出的输出电流的波形示意图。
24.其中,附图标记说明如下:
25.1:电源系统
26.vout:输出电压
27.2:脉宽调制装置
28.3:电源转换装置
29.p1~p4:第一驱动信号至第四驱动信号
30.30、30’:开关模块
31.q1~q4、q1a~q4a:第一晶体管至第四晶体管
32.vdc:直流电压源
33.t、t1:输出节点
34.d1~d4、d1a~d4a:寄生二极管
35.d10:第一二极管
36.d20:第二二极管
37.20:控制单元
38.21:脉宽调制单元
39.sc、sc’:控制信号
40.sc :正周期信号
41.sc-:负周期信号
42.t0、t1、t2、t1’、t2:时间
43.vmin:低电压阀值
44.vmax:最大电压阀值
45.epwm1:第一三角波
46.epwm2:第二三角波
47.s1a:第一斜波信号
48.s2a:第一脉宽信号
49.s3a:第二脉宽信号
50.s4a:第二斜波信号
51.s1:第一比较波形
52.s2:第二比较波形
53.s3:第三比较波形
54.s4:第四比较波形
55.s1’:第一参考波形
56.s2’:第二参考波形
57.s3’:第三参考波形
58.s4’:第四参考波形
59.δt1:第一时间区间
60.δt2:第二时间区间
61.vref:参考电压电平
具体实施方式
62.体现本公开特征与优点的一些典型实施例将在后段的说明中详细叙述。应理解的是本公开能够在不同的态样上具有各种的变化,其皆不脱离本公开的范围,且其中的说明及附图在本质上当作说明之用,而非架构于限制本公开。
63.请参阅图1a、图1b、图1c、图2、图3a、图3b、图4a及图4b,其中图1a为本公开优选实施例的电源系统1的电路方框示意图,图1b为图1a所示的电源转换装置3的第一优选实施例的电路结构示意图,图1c为图1a所示的电源转换装置3的第二优选实施例的电路结构示意图,图2为解释图1a所示的脉宽调制单元21在运行时的信号时序图,图3a为解释脉宽调制单元21产生第一斜波信号s1a及第一参考波形s1’的信号时序图,图3b为解释脉宽调制单元21产生第一脉宽信号s2a及第二参考波形s2’的信号时序图,图4a为在第一时间区间δt1时第一三角波epwm1、第二三角波epwm2、第一斜波信号s1a、第一脉宽信号s2a、第一驱动信号p1至第四驱动信号p4的信号时序示意图,图4b为在第一时间区间δt1时第一三角波epwm1、第二三角波epwm2、第一参考波形s1’、第二参考波形s2’、第一驱动信号p1至第四驱动信号p4的信号时序示意图。如图1a-图1c、图2、图3a-图3b及图4a-图4b所示,本实施例的电源系统1用以将所接收的输入电压,例如电池、太阳能板或电容等所提供的直流电压,转换为交流的输出电压vout,以提供给交流负载,例如马达、电网或工业产品等,其中输出电压vout可为但不限于三相输出电压。电源系统1包含脉宽调制装置2及电源转换装置3。脉宽调制装置2可输出第一驱动信号p1、第二驱动信号p2、第三驱动信号p3及第四驱动信号p4至电源转换装置3,以运行电源转换装置3。电源转换装置3可包含开关模块30,开关模块30可包含多个晶体管,例如图1b所示的四个晶体管q1-q4,电源转换装置3用以接收输入电压,并通过开关模块30的多个晶体管在分别接收第一驱动信号p1、第二驱动信号p2、第三驱动信号p3及第四驱动信号p4中而进行选择性地导通或断开的切换时,将输入电压转换为输出电压vout。开关模块30依据第一至第四驱动信号p1~p4进行选择性地导通或截止,使得直流电压经由开关模块30而被转换为交流电压。因此,于此实施例中,输入电压为直流电压源vdc,且输出电压vout为交流电压,但本发明不限于此。
64.于一些实施例中,如图1b所示,开关模块30可为i-type的三阶层开关模块,且开关模块30的多个晶体管分别为第一晶体管q1、第二晶体管q2、第三晶体管q3及第四晶体管q4。第一晶体管q1包含控制端、第一端点及第二端点,其中第一晶体管q1的控制端耦接第一驱动信号p1,且第一晶体管q1的第一端点耦接直流电压源vdc。第二晶体管q2包含控制端、第一端点及第二端点,其中第二晶体管q2的控制端耦接第二驱动信号p2,且第二晶体管q2的第一端点耦接第一晶体管q1的第二端点。第三晶体管q3包含控制端、第一端点及第二端点,其中第三晶体管q3的控制端耦接第三驱动信号p3,且第三晶体管q3的第一端点耦接第二晶体管q2的第二端点以形成输出节点t,而电源转换装置3经由输出节点t输出该输出电压vout。第四晶体管q4包含控制端、第一端点及第二端点,其中第四晶体管q4的控制端耦接第四驱动信号p4,且第四晶体管q4的第一端点耦接第三晶体管q3的第二端点,且第四晶体管q4的第二端点耦接直流电压源vdc的接地端。于图3a-图3b中,当电源转换装置3接收输入电
压v时,电源转换装置3会将输入电压调整为开关模块30可接受的直流电压源vdc。于其他一些实施例中,直流电压源vdc也可以直接为输入电压,但本发明不限于此。
65.于一些实施例中,第一晶体管q1至第四晶体管q4可分别由金属氧化物半导体场校晶体管(metal-oxide-semiconductor field-effect transistor;mosfet)所构成,但不以此为限,亦可为双极性接面型晶体管(bipolar junction transistor;bjt)等。于一些实施例中,第一至第四晶体管q1~q4可为高电压导通半导体(如:n型mosfet、npn型bjt)或低电压导通半导体(如:p型mosfet、pnp型bjt)。为了方便说明本发明的操作,仅以第一至第四晶体管q1~q4皆为n型mosfet作为范例说明,但本发明不限于此。另外,每一第一至第四晶体管q1~q4的第一端代表n型mosfet的漏极,且每一第一至第四晶体管q1~q4的第二端代表n型mosfet的源极,且每一第一至第四晶体管q1~q4的控制端代表n型mosfet的栅极。
66.另外,第一晶体管q1至第四晶体管q4更可分别包含寄生二极管d1-d4,其中寄生二极管d1的阳极端电连接第一晶体管q1的第二端,寄生二极管d1的阴极端电连接第一晶体管q1的第一端,寄生二极管d2的阳极端电连接第二晶体管q2的第二端,寄生二极管d2的阴极端电连接第二晶体管q2的第一端,寄生二极管d3的阳极端电连接第三晶体管q3的第二端,寄生二极管d3的阴极端电连接第三晶体管q3的第一端,寄生二极管d4的阳极端电连接第四晶体管q4的第二端,寄生二极管d4的阴极端电连接第四晶体管q4的第一端。另外,于一些实施例中,开关模块30更可包含第一二极管d10及第二二极管d20,其中第一二极管d10的阴极端电连接于第一晶体管q1的第二端及第二晶体管q2的第一端之间,第一二极管d10的阳极端与第二二极管d20的阴极端电连接,第二二极管d20的阳极端电连接于第三晶体管q3的第二端及第四晶体管q4的第一端之间。
67.当然,电源转换装置3的开关模块30亦可为t-type的三阶层开关模块,即如图1c所示,且开关模块30的多个晶体管分别为第一晶体管q1、第二晶体管q2、第三晶体管q3及第四晶体管q4。第一晶体管q1包含控制端、第一端点及第二端点,其中第一晶体管q1的控制端耦接第一驱动信号p1,且第一晶体管q1的第一端点耦接直流电压源vdc。第二晶体管q2包含控制端、第一端点及第二端点,其中第二晶体管q2的控制端耦接第二驱动信号p2,且第二晶体管q2的第一端点耦接直流电压源vdc。第三晶体管q3包含控制端、第一端点及第二端点,其中第三晶体管q3的控制端耦接第三驱动信号p3,且第三晶体管q3的第二端点耦接第二晶体管q2的第二端点。第四晶体管q4包含控制端、第一端点及第二端点,其中第四晶体管q4的控制端耦接第四驱动信号p4,且第四晶体管q4的第一端点共同耦接于第三晶体管q3的第一端点及第一晶体管q1的第二端点,以共同形成输出节点t1,而电源转换装置3经由输出节点t1输出该输出电压vout,且第四晶体管q4的第二端点耦接直流电压源vdc的接地端。另外,第一晶体管q1至第四晶体管q4更可分别包含寄生二极管d1a-d4a,其中寄生二极管d1a的阳极端电连接第一晶体管q1的第二端,寄生二极管d1a的阴极端电连接第一晶体管q1的第一端,寄生二极管d2a的阳极端电连接第二晶体管q2的第二端,寄生二极管d2a的阴极端电连接直流电压源vdc,寄生二极管d3a的阳极端电连接第三晶体管q3的第二端,寄生二极管d3a的阴极端电连接第三晶体管q3的第一端,寄生二极管d4a的阳极端电连接第四晶体管q4的第二端,寄生二极管d4a的阴极端电连接第四晶体管q4的第一端。由于图1c的开关模块30的作动与图1b所示的开关模块30的作动方式相同,且皆可达到相同的效果,故下述提及的技术内容,仅以图1b所示的开关模块30来示范性说明。
68.脉宽调制装置2所输出的第一驱动信号p1、第二驱动信号p2、第三驱动信号p3及第四驱动信号p4分别提供给第一晶体管q1、第二晶体管q2、第三晶体管q3以及第四晶体管q4,使第一晶体管q1、第二晶体管q2、第三晶体管q3以及第四晶体管q4分别进行导通或断开的切换。于一些实施例中,第一驱动信号p1及第三驱动信号p3的波形为互补,第二驱动信号p2及第四驱动信号p4的波形为互补,换言之,即第一晶体管q1的作动方式与第三晶体管q3的作动方式为互补,第二晶体管q2的作动方式与第四晶体管q4的作动方式为互补。
69.脉宽调制装置2更包含控制单元20及脉宽调制单元21。控制单元20用以产生控制信号sc给脉宽调制单元21,且脉宽调制单元21依据控制信号sc控制电源转换装置3中的开关模块30,其中控制信号sc可为但不限于周期性信号。一些实施例中,控制单元20更会通过电压采样元件或电流采样元件等分别采样电源转换装置3的输出电压vout及输出电流,以依据采样结果对应调整控制信号sc。脉宽调制单元21依据参考电压电平vref,例如图2所示为零电压电平的参考电压电平vref,决定控制信号sc的临界时间点,且依据临界时间点将控制信号区sc分为为正半周期的正周期信号sc 及为负半周期的负周期信号sc-,如图2所示,以零电压电平来决定控制信号sc的临界时间点时,则控制信号sc的临界时间点即为t0,故控制信号sc在时间t0以后为正周期信号sc ,控制信号sc在时间t0的前为负周期信号sc-,其中控制信号sc于临界时间点t0接近参考电压电平vref于可容许的误差范围内。
70.另外,脉宽调制单元21箝位正周期信号sc 的大于或等于最大电压阀值vmax的部分于最大电压阀值vmax以形成第一比较波形s1,并且脉宽调制单元21还将正周期信号sc 箝位于参考电压电平vref以作为第二比较波形s2。又脉宽调制单元21取样落入临界时间点(如图2所示的时间t0)至第一预定时间t1的第一时间区间δt1内的第一比较波形s1及第二比较波形s2。且脉宽调制单元21更叠加低电压阀值vmin和落入第一时间区间δt1内的第一比较波形s1以形成第一斜波信号s1a(如图3a所示),且脉宽调制单元21亦叠加低电压阀值vmin和落入第一时间区间δt1内的第二比较波形s2以形成第一脉宽信号s2a(如图3b所示)。
71.更甚者,于第一时间区间δt1内,脉宽调制单元21比较第一斜波信号s1a与第一三角波epwm1以调整第一驱动信号p1及第三驱动信号p3,且脉宽调制单元21比较第一脉宽信号s2a与第二三角波epwm2以调整第二驱动信号s2及第四驱动信号p4(如图4a所示),其中第一三角波epwm1及第二三角波epwm2之间的相位差为180度。
72.于上述实施例中,第一时间区间δt1即为在控制信号区sc的正半周期时,电源系统1执行最小脉宽限制的时间区间。低电压阀值vmin为电源系统1在执行最小脉宽限制时,电源系统1的输出电压vout的预设值。
73.再者,如图4a所示,于第一时间区间δt1内,当脉宽调制单元21判断第一斜波信号s1a大于第一三角波epwm1时,脉宽调制单元21切换第一驱动信号p1至高电压电平,且切换第三驱动信号p3至低电压电平,使第一晶体管q1切换为导通而第三晶体管q3切换为断开;此外,于第一时间区间δt1内,当脉宽调制单元21判断第一脉宽信号s2a小于第二三角波epwm2时,脉宽调制单元21切换第二驱动信号p2至高电压电平,且切换第四驱动信号p4至低电压电平,使第二晶体管q2切换为导通而第四晶体管q4切换为断开。
74.另外,于第一时间区间δt1内,当脉宽调制单元21判断第一斜波信号s1a小于或等于第一三角波epwm1时,脉宽调制单元21切换第一驱动信号p1至低电压电平且切换第三驱
动信号p3至高电压电平,使第一晶体管q1切换为断开而第三晶体管q3切换为导通;又于第一时间区间δt1内,当脉宽调制单元21判断第一脉宽信号s2a大于或等于第二三角波epwm2时,脉宽调制单元21切换第二驱动信号p2至低电压电平且切换第四驱动信号p4至高电压电平,使第二晶体管q2切换为断开而第四晶体管q4切换为导通。而由图4a可知,在控制信号sc的正半周期时,输出电压vout由0、-vdc/2及vdc/2来组成。
75.由前述内容可知,本公开的电源系统1的脉宽调制单元21会在控制信号sc的正半周期且于临界时间点t0至第一预定时间的第一时间区间δt1时,叠加低电压阀值vmin和落入第一时间区间δt1内的第一比较波形s1以形成第一斜波信号s1a,且叠加低电压阀值vmin和落入第一时间区间δt1内的第二比较波形s2以形成第一脉宽信号s2a,换言之,即在控制信号区sc于正半周期而电源系统1执行最小脉宽限制的时间区间时,对控制信号sc补偿了低电压阀值vmin,如此一来,本公开的电源系统1不但可以满足最小脉宽的限制,且由于在临界时间点t0至第一预定时间的第一时间区间δt1内,第一斜波信号s1a叠加控制信号sc的正半周期,与第一脉宽信号s2 a产生的低电压阀值vmin相消,故维持理想的控制信号sc,且满足电源系统1执行最小脉宽限制的时间区,因此可确保输出电压vout的准确性。
76.以下将再说明电源系统1于控制信号sc为负半周期时的运行。请参阅图1a-图1b、图2,并配合图5a、图5b、图6a及图6b,其中图5a为解释脉宽调制单元21产生第二脉宽信号s3a及第三参考波形s3’的信号时序图,图5b为解释脉宽调制单元21产生第二斜波信号s4a及第四参考波形s4’的信号时序图,图6a为在第二时间区间时第一三角波epwm1、第二三角波epwm2、第二脉宽信号s3a、第二斜波信号s4a、第一驱动信号p1至第四驱动信号p4的信号时序示意图,图6b为在第二时间区间时第一三角波epwm1、第二三角波epwm2、第三参考波形s3’、第四参考波形s4’、第一驱动信号p1至第四驱动信号p4的信号时序示意图。于一些实施例中,在控制信号sc的负半周期时,脉宽调制单元21将负周期信号sc-箝位于参考电压电平vref以作为第三比较波形s3,且脉宽调制单元21反相负周期信号sc-,且箝位已反相的负周期信号sc-的大于或等于最大电压阀值vmax的部分于最大电压阀值vmax以形成第四比较波形s4。
77.此外,脉宽调制单元21更可取样落入临界时间点t0至第二预定时间t2的第二时间区间δt2内的第三比较波形s3及第四比较波形s4。又脉宽调制单元21更叠加低电压阀值vmin和落入第二时间区间δt2内的第三比较波形s3以形成第二脉宽信号s3a,且脉宽调制单元21亦叠加低电压阀值vmin和落入第二时间区间δt2内的第四比较波形s4以形成第二斜波信号s4a。
78.更甚者,于第二时间区间δt2内,脉宽调制单元21比较第二脉宽信号s3a与第一三角波epwm1以调整第一驱动信号p1及第三驱动信号p3,且脉宽调制单元21比较第二斜波信号s4a与第二三角波epwm2以调整第二驱动信号p2及第四驱动信号p4。于上述实施例中,第二时间区间δt2即为在控制信号区sc于负半周期时,电源系统1执行最小脉宽限制的时间区间。
79.更甚者,如图6a所示,于第二时间区间δt2内,当脉宽调制单元21判断第二脉宽信号s3a大于第一三角波epwm1时,脉宽调制单元21切换第一驱动信号p1至高电压电平,且切换第三驱动信号p3至低电压电平,使第一晶体管q1切换为导通而第三晶体管q3切换为断开。另外,于第二时间区间δt2内,当脉宽调制单元21判断第二斜波信号s4a小于第二三角
波epwm2时,脉宽调制单元21切换第二驱动信号p2至高电压电平,且切换第四驱动信号p4至低电压电平,使第二晶体管q2切换为导通而第四晶体管q4切换为断开。
80.另外,于第二时间区间δt2内,当脉宽调制单元21判断第二脉宽信号s3a小于或等于第一三角波epwm1时,脉宽调制单元21切换第一驱动信号p1至低电压电平且切换第三驱动信号p3至高电压电平,使第一晶体管q1切换为断开而第三晶体管q3切换为导通;又于第二时间区间δt2内,当脉宽调制单元21判断第二斜波信号s4a大于或等于第二三角波epwm2时,脉宽调制单元21切换第二驱动信号p2至低电压电平且切换第四驱动信号p4至高电压电平,使第二晶体管q2切换为断开而第四晶体管q4切换为导通。而由图6a可知,在控制信号sc的负半周期时,输出电压vout由0、-vdc/2及vdc/2来组成。
81.请再参阅图7及图8,并配合图1a至图6b,其中图7为附加了最小脉宽限制技术的传统电源系统所输出的输出电流的波形示意图,图8为本公开的电源系统1所输出的输出电流的波形示意图。如图所示,首先,根据图7所示可知,在传统电源系统的控制单元所输出的控制信号sc’接近零交越点时,由于传统电源系统进入最小脉宽限制的时间区间,故传统电源系统所输出的输出电流(包含u相电流、v相电流及w相电流)上会产生失真的现象,然而由于本公开的电源系统1在控制信号区sc于正半周期及负半周期而电源系统1执行最小脉宽限制的时间区间时,会对控制信号sc补偿低电压阀值vmin,故如图8所示,本公开的电源系统1所输出的输出电流(包含u相电流、v相电流及w相电流)可大幅改善失真的现象。
82.请再参阅图3a-图3b及图4b,并配合图2,又于一些实施例中,脉宽调制单元21可取样于第一时间区间δt1之外,例如图3a所示的时间t1以后的第一比较波形s1,以作为第一参考波形s1’,且脉宽调制单元21还取样于第一时间区间δt1之外,例如图3b所示的时间t1以后的第二比较波形s2以作为第二参考波形s2’,且如图4b所示,脉宽调制单元21并比较第一参考波形s1’与第一三角波epwm1以调整第一驱动信号p1及第三驱动信号p3,其中当脉宽调制单元21判断第一参考波形s1’大于第一三角波epwm1时,则脉宽调制单元21切换第一驱动信号p1至高电压电平,且将第三驱动信号p3切换至低电压电平。另外,当脉宽调制单元21判断第一参考波形s1’小于或等于第一三角波epwm1时,则脉宽调制单元21切换第一驱动信号p1至低电压电平,且切换第三驱动信号p3切换至高电压电平。更甚者,当脉宽调制单元21判断该第二参考波形s2’恒小于第二三角波epwm2时,则脉宽调制单元21维持第二驱动信号p2至高电压电平且维持第四驱动信号p4至低电压电平。
83.请再参阅图5a-图5b及图6b,并配合图2,又于一些实施例中,脉宽调制单元21还取样于第二时间区间δt2之外,例如图5a所示的时间t2以前,的第三比较波形s3以作为第三参考波形s3’,且脉宽调制单元21还取样于第二时间区间δt2之外,例如图5b所示的时间t2以前,的第四比较波形s4以作为第四参考波形s4’,且如图6b所示,脉宽调制单元21比较第四参考波形s4’与第二三角波epwm2以调整第二驱动信号p2及第四驱动信号p4,其中当脉宽调制单元21判断第四参考波形s4’小于第二三角波epwm2时,则脉宽调制单元21切换第二驱动信号p2至高电压电平,且将第四驱动信号p4切换至低电压电平。另外,当脉宽调制单元21判断第四参考波形s4’大于或等于第二三角波epwm2时,则脉宽调制单元21切换第二驱动信号p2至低电压电平,且切换第四驱动信号p4至高电压电平。更甚者,当脉宽调制单元21判断第三参考波形s3’恒小于第一三角波epwm1时,则脉宽调制单元21维持第一驱动信号p1至低电压电平且维持第三驱动信号p3至高电压电平。
84.于一些实施例中,第一三角波epwm1及第二三角波epwm2分别为控制信号sc的载波,且第一三角波epwm1及第二三角波epwm2的频率至少为控制信号sc的频率的十倍。而由于第一三角波epwm1及第二三角波epwm2的频率大于控制信号sc的频率十倍以上,所以放大波形来看,对载波而言与控制信号sc相关的波形为直线,即如第4a-4b图及图6a-图6b所示。
85.以下将再说明系适用于前述实施例中的电源系统1的脉宽调制装置2的本公开的脉宽调制方法的步骤流程。本公开的脉宽调制方法包含下列步骤。
86.首先,于步骤s1中,脉宽调制装置2的脉宽调制单元21接收控制单元20所输出的控制信号sc,其中控制信号sc为周期性信号。
87.于步骤s2中,脉宽调制单元21依据参考电压电平vref决定控制信号sc的临界时间点。
88.于步骤s3中,脉宽调制单元21依据临界时间点将控制信号sc区分为正周期信号sc 及负周期信号sc-,其中控制信号sc于临界时间点接近参考电压电平vref于误差范围内。
89.于步骤s4中,脉宽调制单元21箝位正周期信号sc 的大于或等于最大电压阀值vmax的部分于最大电压阀值vmax以形成第一比较波形s1。
90.于步骤s5中,脉宽调制单元21将正周期信号sc 箝位于参考电压电平vref以作为第二比较波形s2。
91.于步骤s6中,脉宽调制单元21取样落入临界时间点(如图2所示的时间t0)至第一预定时间t1的第一时间区间δt1内的第一比较波形s1及第二比较波形s2。
92.于步骤s7中,脉宽调制单元21叠加低电压阀值vmin和落入第一时间区间δt1内的第一比较波形s1以形成第一斜波信号s1a(如图3a所示)。
93.于步骤s8中,脉宽调制单元21叠加低电压阀值vmin和落入第一时间区间δt1内的第二比较波形s2以形成第一脉宽信号s2a(如图3b所示)。
94.于步骤s9中,在第一时间区间δt1内,脉宽调制单元21比较第一斜波信号s1a与第一三角波epwm1以调整第一驱动信号p1及第三驱动信号p3。
95.于步骤s10中,在第一时间区间δt1内,脉宽调制单元21比较第一脉宽信号s2a与第二三角波epwm2以调整第二驱动信号s2及第四驱动信号p4(如图4a所示)。其中第一三角波epwm1及第二三角波epwm2之间的相位差为180度。
96.另外,当步骤s9的比较结果为脉宽调制单元21判断第一斜波信号s1a大于第一三角波epwm1时,脉宽调制单元21切换第一驱动信号p1至高电压电平,且切换第三驱动信号p3至低电压电平,使第一晶体管q1切换为导通而第三晶体管q3切换为断开。又当步骤s10的比较结果为脉宽调制单元21判断第一脉宽信号s2a小于第二三角波epwm2时,脉宽调制单元21切换第二驱动信号p2至高电压电平,且切换第四驱动信号p4至低电压电平,使第二晶体管q2切换为导通而第四晶体管q4切换为断开。
97.反之,当步骤s9的比较结果为脉宽调制单元21判断第一斜波信号s1a小于或等于第一三角波epwm1时,脉宽调制单元21切换第一驱动信号p1至低电压电平且切换第三驱动信号p3至高电压电平,使第一晶体管q1切换为断开而第三晶体管q3切换为导通。又当步骤s10的比较结果为脉宽调制单元21判断第一脉宽信号s2a大于或等于第二三角波epwm2时,脉宽调制单元21切换第二驱动信号p2至低电压电平且切换第四驱动信号p4至高电压电平,使第二晶体管q2切换为断开而第四晶体管q4切换为导通。
98.于一些实施例中,本公开的脉宽调制方法更包含下列步骤。
99.于步骤s1’中,脉宽调制单元21将负周期信号sc-箝位于参考电压电平vref以作为第三比较波形s3。
100.于步骤s2’中,脉宽调制单元21反相负周期信号sc-,且箝位已反相的负周期信号sc-的大于或等于最大电压阀值vmax的部分于最大电压阀值vmax以形成第四比较波形s4。
101.于步骤s3’中,脉宽调制单元21可取样落入临界时间点t0至第二预定时间t2的第二时间区间δt2内的第三比较波形s3及第四比较波形s4。
102.于步骤s4’中,脉宽调制单元21叠加低电压阀值vmin和落入第二时间区间δt2内的第三比较波形s3以形成第二脉宽信号s3a。
103.于步骤s5’中,脉宽调制单元21叠加低电压阀值vmin和落入第二时间区间δt2内的第四比较波形s4以形成第二斜波信号s4a。
104.于步骤s6’中,于第二时间区间δt2内,脉宽调制单元21比较第二脉宽信号s3a与第一三角波epwm1以调整该第一驱动信号p1及第三驱动信号p3。
105.于步骤s7’中,脉宽调制单元21比较第二斜波信号s4a与第二三角波epwm2以调整第二驱动信号p2及第四驱动信号p4。
106.另外,在步骤s6’中,在第二时间区间δt2内,当脉宽调制单元21判断第二脉宽信号s3a大于第一三角波epwm1时,脉宽调制单元21切换第一驱动信号p1至高电压电平。又在步骤s7’中,在第二时间区间δt2内,当脉宽调制单元21判断第二斜波信号s4a小于第二三角波epwm2时,脉宽调制单元21切换第二驱动信号p2至高电压电平,且切换第四驱动信号p4至低电压电平,使第二晶体管q2切换为导通而第四晶体管q4切换为断开。
107.反之,当在步骤s6’中,在第二时间区间δt2内,当脉宽调制单元21判断第二脉宽信号s3a小于或等于第一三角波epwm1时,脉宽调制单元21切换第一驱动信号p1至低电压电平且切换第三驱动信号p3至高电压电平,使第一晶体管q1切换为断开而第三晶体管q3切换为导通。又在步骤s7’中,当脉宽调制单元21判断第二斜波信号s4a大于或等于第二三角波epwm2时,脉宽调制单元21切换第二驱动信号p2至低电压电平且切换第四驱动信号p4至高电压电平,使第二晶体管q2切换为断开而第四晶体管q4切换为导通。
108.于一些实施例中,上述提及的控制单元可为但不限于包含微控制器,脉宽调制单元可为但不限于包含脉宽调制器。
109.综上所述,本公开提供一种电源系统及其适用的脉宽调制方法,其中本公开的电源系统可在控制信号区于正半周期及负半周期且执行最小脉宽限制的时间区间时,对控制信号补偿低电压阀值,故本公开的电源系统所输出的输出电能可大幅改善失真的现象。
110.须注意,上述仅是为说明本公开而提出的优选实施例,本公开不限于所述的实施例,本公开的范围由如附权利要求决定。且本公开得由熟习此技术的人士任施匠思而为诸般修饰,然皆不脱如附权利要求所欲保护者。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。