技术特征:
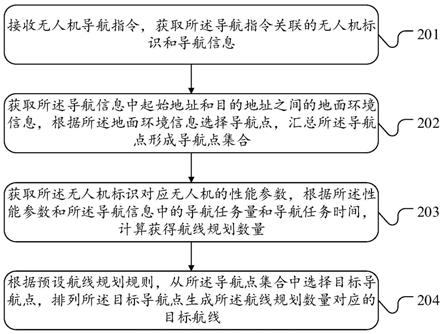
1.一种无人机航线生成方法,其特征在于,所述无人机航线生成方法包括:接收无人机导航指令,获取所述导航指令关联的无人机标识和导航信息;获取所述导航信息中起始地址和目的地址之间的地面环境信息,根据所述地面环境信息选择导航点,汇总所述导航点形成导航点集合;获取所述无人机标识对应无人机的性能参数,根据所述性能参数和所述导航信息中的导航任务量和导航任务时间,计算获得航线规划数量;根据预设航线规划规则,从所述导航点集合中选择目标导航点,排列所述目标导航点生成所述航线规划数量对应的目标航线。2.根据权利要求1所述的无人机航线生成方法,其特征在于,所述获取所述导航信息中起始地址和目的地址之间的地面环境信息,根据所述地面环境信息选择导航点,汇总所述导航点形成导航点集合,包括:提取所述导航信息中的起始地址和目的地址,以所述起始地址和所述目的地址之间的线段为中心线段,确定导航运输区域;获取所述导航运输区域的地面环境信息,根据所述地面环境信息中的地面建筑信息、地面人流信息和地面自然资源信息,从所述导航运输区域中选择可飞行区域;以所述起始地址为起点所述目的地址为终点,在所述可飞行区域中选择导航点,并汇总所述导航点形成导航点集合。3.根据权利要求1所述的无人机航线生成方法,其特征在于,所述获取所述无人机标识对应无人机的性能参数,根据所述性能参数和所述导航信息中的导航任务量和导航任务时间,计算获得航线规划数量,包括:获取所述无人机标识对应无人机的性能参数,根据所述性能参数中的飞行速度和所述导航信息中的所述起始地址和所述目的地址,计算获得单次运输时间;根据所述导航信息中的导航任务时间和所述单次运输时间,计算获得单机运输次数;根据所述性能参数中的负载量和所述单机运输次数,计算获得单机总运输量;根据所述导航信息中的导航任务量和所述单机总运输量,计算获得航线规划数量。4.根据权利要求1所述的无人机航线生成方法,其特征在于,所述根据预设航线规划规则,从所述导航点集合中选择目标导航点,排列所述目标导航点生成所述航线规划数量对应的目标航线,包括:根据预设航线规划规则和所述性能参数中的无人机转弯夹角、无人机爬坡角度和无人机俯冲角度,从所述导航点集合中选择目标导航点;按照所述目标导航点的空间位置,排列所述目标导航点生成所述航线规划数量对应的目标航线。5.根据权利要求1所述的无人机航线生成方法,其特征在于,所述接收无人机导航指令,获取所述导航指令关联的无人机标识和导航信息之后,所述方法包括:提取所述导航信息中的起始地址和目的地址,判断所述起始地址和所述目的地址之间是否存在已规划航线;若所述起始地址和所述目的地址之间存在已规划航线,则获取所述无人机标识对应无人机的性能参数,根据所述性能参数和所述导航信息中的导航任务量和导航任务时间,从所述已规划航线中选择目标航线;
若所述起始地址和所述目的地址之间不存在已规划航线,则执行所述获取所述导航信息中起始地址和目的地址之间的地面环境信息,根据所述地面环境信息选择导航点,汇总所述导航点形成导航点集合的步骤。6.根据权利要求5所述的无人机航线生成方法,其特征在于,所述若所述起始地址和所述目的地址之间存在已规划航线,则获取所述无人机标识对应无人机的性能参数,根据所述性能参数和所述导航信息中的导航任务量和导航任务时间,从所述已规划航线中选择目标航线,包括:若所述起始地址和所述目的地址之间存在已规划航线,则获取所述已规划航线的环境信息;根据所述已规划航线的环境信息,确定所述已规划航线的优先等级;获取所述无人机标识对应无人机的性能参数,根据所述性能参数和所述导航信息中的导航任务量和导航任务时间,计算获得航线使用数量;将所述已规划航线按照优先等级从高到低进行排列,从所述已规划航线中选择所述航线使用数量对应的目标航线。7.根据权利要求1-6任意一项所述的无人机航线生成方法,其特征在于,所述根据预设航线规划规则,从所述导航点集合中选择目标导航点,排列所述目标导航点生成所述航线规划数量对应的目标航线,包括:控制无人机沿所述航线执行导航任务,并获取所述无人机的状态信息;分析所述无人机的状态信息,获得无人机的飞行风险系数,若所述无人机的飞行风险系数大于预设风险系数,则调整无人机的航线;统计所述航线的事故发生率,若所述航线的事故发生率高于预设阈值,则调整所述航线中的各个导航点,生成新的航线。8.一种无人机航线生成装置,其特征在于,所述无人机航线生成装置包括:请求接收模块,用于接收无人机导航指令,获取所述导航指令关联的无人机标识和导航信息;获取汇总模块,用于获取所述导航信息中起始地址和目的地址之间的地面环境信息,根据所述地面环境信息选择导航点,汇总所述导航点形成导航点集合;数量确定模块,用于获取所述无人机标识对应无人机的性能参数,根据所述性能参数和所述导航信息中的导航任务量和导航任务时间,计算获得航线规划数量;航线生成模块,用于根据预设航线规划规则,从所述导航点集合中选择目标导航点,排列所述目标导航点生成所述航线规划数量对应的目标航线。9.一种无人机航线生成设备,其特征在于,所述无人机航线生成设备包括:一个或多个处理器;存储器;以及一个或多个应用程序,其中所述一个或多个应用程序被存储于所述存储器中,并配置为由所述处理器执行以实现权利要求1至7中任一项所述的无人机航线生成方法。10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被处理器进行加载,以执行权利要求1至7任一项所述的无人机航线生成方法中的步骤。
技术总结
本申请提供一种无人机航线生成方法、装置、设备和计算机可读存储介质;本申请中方法,包括:接收无人机导航指令,获取所述导航指令关联的无人机标识和导航信息;获取所述导航信息中起始地址和目的地址之间的地面环境信息,根据所述地面环境信息选择导航点,汇总所述导航点形成导航点集合;获取所述无人机标识对应无人机的性能参数,根据所述性能参数和所述导航信息中的导航任务量和导航任务时间,计算获得航线规划数量;根据预设航线规划规则,从所述导航点集合中选择目标导航点,排列所述目标导航点生成所述航线规划数量对应的目标航线;本申请根据无人机的导航信息和性能信息合理地规划航线,有效地提高了无人机的运输效率。有效地提高了无人机的运输效率。有效地提高了无人机的运输效率。
技术研发人员:马凡
受保护的技术使用者:丰翼科技(深圳)有限公司
技术研发日:2020.11.24
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。