1.本技术属于磁感应技术领域,更具体地说,是涉及一种旋转角度识别装置及旋钮。
背景技术:
2.在一些需要识别旋转角度的应用场景,例如用于调整风扇转速的旋钮,通常需要识别旋转件转动后停留位置所对应的角度。
3.目前,现有的角度识别装置通常采用电位器,根据电位器的输出电阻来判断旋转角度。例如,公开号为cn214837227u的专利文献公开了一种风扇电路,其采用电位器作为调速模块。
4.然而,电位器的滑片在滑动过程中会产生电弧,对电路元件造成冲击,容易发生故障或安全问题,并且电位器在工作时需要长期导通,功耗较大。
技术实现要素:
5.本技术实施例的目的在于提供一种旋转角度识别装置、旋钮、学习用具及娱乐用具,以解决现有技术中存在的角度识别装置在工作时容易发生故障或安全问题的技术问题。
6.为实现上述目的,本技术采用的技术方案是:提供一种旋转角度识别装置,包括:基座;旋转件,可转动地安装于所述基座,所述旋转件设有传动面,所述传动面位于所述旋转件的沿轴向的一端且所述传动面的轴向位置尺寸随着所述旋转件的转动而变化,或者所述传动面位于所述旋转件的外周且所述传动面的径向位置尺寸随着所述旋转件的转动而变化;磁感应组件,包括检测移动件、检测转动件、检测磁体、检测磁感应元件,所述检测移动件的一端被配置为与所述传动面保持接触,所述检测移动件在所述旋转件的驱动下移动,所述检测转动件与所述检测移动件连接,所述检测转动件在所述检测移动件的驱动下转动,所述检测磁体与所述检测转动件连接并跟随所述检测转动件转动,所述检测磁感应元件相对于所述基座固定并用于检测所述检测磁体的角度变化。
7.可选地,所述传动面包括围绕所述旋转件的旋转轴线设置的螺旋斜面;或者,所述传动面包括围绕所述旋转件的旋转轴线设置的凸轮面,所述凸轮面到所述旋转件的旋转轴线的距离随着所述旋转件的转动而变化。
8.可选地,所述传动面上设有多个间隔分布的卡位槽,随着所述旋转件的转动,所述检测移动件的端部依次落入各个所述卡位槽。
9.可选地,所述传动面位于所述旋转件的沿轴向的一端且所述传动面的轴向位置尺寸随着所述旋转件的转动而变化,所述检测转动件的旋转轴线与所述检测移动件的移动方向平行,所述检测磁体的磁化方向与所述检测转动件的旋转轴线垂直,所述检测磁感应元件位于所述检测磁体的沿轴向的一侧。
10.可选地,所述磁感应组件还包括传动件,所述检测移动件和所述检测转动件分别与所述传动件连接;所述检测移动件驱动所述传动件转动,所述传动件的旋转轴线与所述检测移动件的移动方向垂直,所述传动件驱动所述检测转动件转动;或者,所述检测移动件驱动所述传动件移动,所述传动件的移动与所述检测移动件的移动方向垂直,所述传动件驱动所述检测转动件转动。
11.可选地,所述检测移动件设有螺旋槽,所述螺旋槽围绕所述检测转动件的旋转轴线螺旋延伸,所述检测转动件设有插入所述螺旋槽的凸起。
12.可选地,所述磁感应组件还包括检测弹性件和相对于所述基座固定的安装座,所述检测弹性件与所述检测移动件连接,所述检测移动件在所述检测弹性件的推动下与所述传动面保持接触,所述安装座具有容纳腔,所述检测移动件、所述检测弹性件、所述检测转动件和所述检测磁体均设于所述容纳腔内,所述检测移动件可相对于所述安装座移动,所述安装座的靠近所述传动面的一端设有供所述检测移动件露出的通孔,所述检测弹性件的两端分别抵接于所述安装座和所述检测移动件,所述检测转动件可相对于所述安装座转动。
13.可选地,所述传动面包括多个首尾相接的传动区间,且所述传动区间的数量为偶数,沿着预定旋转方向,相邻的两个所述传动区间的轴向位置尺寸或径向位置尺寸的变化趋势相反。
14.可选地,各个所述传动区间上均至少有一个取值点,且不同的所述取值点的轴向位置尺寸或径向位置尺寸不同,当所述检测移动件位于所述取值点时,所述检测磁感应元件反馈的信号被读取。
15.可选地,还包括区间判断组件,所述旋转件设有多个围绕所述旋转件的旋转轴线设置的区间参考部,所述区间参考部与所述传动区间一一对应地配置,所述区间判断组件用于识别不同的所述区间参考部。
16.可选地,所述区间参考部设有区间参考面,不同的所述区间参考部的所述区间参考面的轴向位置尺寸或径向位置尺寸不同,所述区间判断组件用于识别所述区间参考面的位置。
17.可选地,所述区间判断组件包括参考移动件、参考磁体、参考磁感应元件,所述参考移动件的一端被配置为与所述区间参考面保持接触,所述参考磁体与所述参考移动件连接并跟随所述参考移动件移动,所述参考磁感应元件相对于所述基座固定并用于检测所述参考磁体的位置变化。
18.可选地,所述旋转角度识别装置包括多个所述旋转件,多个所述旋转件沿着径向由内到外依次套设,至少一个所述旋转件配设有所述磁感应组件。
19.可选地,所述旋转件的外端面设有多个标识,多个所述标识围绕所述旋转件的旋转轴线设置,相邻的两个所述旋转件的所述标识可相互对准。
20.可选地,还包括显示模块,所述显示模块设于最内侧的所述旋转件的所述标识因旋转运动而形成的轨迹圈的内部,所述显示模块用于显示与多个所述旋转件的所述标识相互对准而形成的信息相关的内容。
21.可选地,还包括相对于所述基座固定设置的视察辅助件,所述视察辅助件位于所述旋转件的轴向外侧,所述视察辅助件设有视察窗,处于对准状态的所述标识位于所述视
察窗内。
22.可选地,所述基座设有容纳腔,所述容纳腔具有开口,所述磁感应组件位于所述容纳腔内,所述旋转件设于所述容纳腔的开口。
23.可选地,所述容纳腔内设有多个环形支撑结构,所述旋转件可转动地支撑于所述环形支撑结构。
24.可选地,所述环形支撑结构包括支撑座和环形凸筋,所述旋转件设有围绕所述旋转件的旋转轴线设置的环形套,所述环形套轴向支撑于所述支撑座,所述环形套径向定位于所述环形凸筋。
25.本技术还提供一种旋钮、学习用具和娱乐用具,所述旋钮、所述学习用具和所述娱乐用具分别包括上述任何一种的旋转角度识别装置。
26.本技术提供的旋转角度识别装置的有益效果在于:与现有技术相比,本技术的旋转角度识别装置包括基座、旋转件和磁感应组件,旋转件在转动过程中驱动检测移动件移动,检测移动件驱动检测转动件和检测磁体转动,检测磁感应元件检测检测磁体的角度变化,从而可以测算旋转件的转动角度,磁感应的方式具有非电接触的特点,能够提高旋转角度识别装置的使用可靠性和安全性,此外,与检测磁场移动位移的磁感应技术相比,检测磁场角度变化的磁感应技术的检测精度更高,可识别更精细的旋转角度。
附图说明
27.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
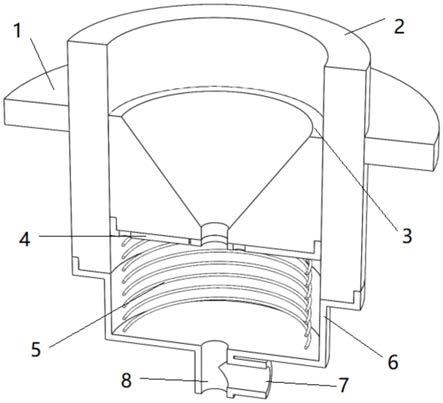
28.图1为本技术的第一实施例提供的旋转角度识别装置的原理示意图;图2为本技术的第二实施例提供的旋转角度识别装置的原理示意图;图3为本技术的第三实施例提供的旋转角度识别装置的原理示意图;图4为本技术的第四实施例提供的旋转角度识别装置的原理示意图;图5为本技术的第五实施例提供的旋转角度识别装置的原理示意图;图6为本技术的第六实施例提供的旋转角度识别装置的俯视图;图7为本技术的第六实施例提供的旋转角度识别装置的爆炸图;图8为本技术的第六实施例提供的旋转角度识别装置的剖视图;图9为本技术的第六实施例提供的旋转件的仰视图;图10为本技术的第六实施例提供的旋转件的剖视图;图11为本技术的第六实施例提供的磁感应组件的方案一的爆炸图;图12为本技术的第六实施例提供的磁感应组件的方案二的爆炸图;图13为本技术的第六实施例提供的磁感应组件的方案三的爆炸图;图14为本技术的第六实施例提供的磁感应组件的方案三的部分结构示意图;图15为本技术的第六实施例提供的磁感应组件的方案三的剖视图;图16为本技术的第六实施例提供的区间判断组件的结构示意图。
29.其中,图中各附图标记:
100-旋转角度识别装置,110-基座,120-旋转件,121-传动面,130-磁感应组件,131-检测移动件,132-检测磁体,133-检测磁感应元件,134-检测转动件,220-旋转件,221-传动面,320-旋转件,321-传动面,400-旋转角度识别装置,420-旋转件,421-传动面,422-区间参考面,440-区间判断组件,441-参考移动件,442-参考磁体,443-参考磁感应元件,521-传动区间,522-区间参考面,600-旋转角度识别装置,610-基座,611-底座,612-中心安装件,613-盖体,614-环形支撑结构,6141-支撑座,6142-环形凸筋,620-旋转件,621-转盘部,622-传动部,6221-传动面,6222-卡位槽,623-参考部,6231-区间参考面,624-环形套,620a-第一旋转件,620b-第二旋转件,620c-第三旋转件,630-磁感应组件,630a-磁感应组件,631a-检测移动件,632a-检测磁体,633a-检测磁感应元件,634a-检测弹性件,635a-传动件,636a-检测转动件,637a-安装座,630b-磁感应组件,631b-检测移动件,633b-检测磁感应元件,634b-检测弹性件,635b-传动件,636b-检测转动件,637b-安装座,638b-弹力件,630c-磁感应组件,631c-检测移动件,6311c-螺旋槽,632c-检测磁体,633c-检测磁感应元件,634c-检测弹性件,636c-检测转动件,6361c-凸起,637c-安装座,640-区间判断组件,641-参考移动件,6411-本体部,6412-抵接部,6413-组装部,642-参考磁体,643-参考磁感应元件,644-参考弹性件,645-穿插轴,646-安装座,651-第一标识,652-第二标识,653-第三标识,672-显示模块,680-视察辅助件,681-视察窗。
具体实施方式
30.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
31.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
32.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
33.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
34.图1、图2、图3、图4、图5和图6分别示出了本技术提供的旋转角度识别装置的不同实施例。
35.实施例一:
请参见图1,现对本技术实施例提供的旋转角度识别装置100进行说明。旋转角度识别装置100包括:基座110、旋转件120和磁感应组件130。
36.旋转件120可转动地安装于基座110,旋转件120设有传动面121,传动面121位于旋转件120的沿轴向的一端且传动面121的轴向位置尺寸随着旋转件120的转动而变化,或者传动面121位于旋转件120的外周且传动面121的径向位置尺寸随着旋转件120的转动而变化;磁感应组件130包括检测移动件131、检测转动件134、检测磁体132、检测磁感应元件133,检测移动件131的一端被配置为与传动面121保持接触,检测移动件131在旋转件120的驱动下移动,检测转动件134与检测移动件131连接,检测转动件134在检测移动件131的驱动下转动,检测磁体132与检测转动件134连接并跟随检测转动件134转动,检测磁感应元件133相对于基座110固定并用于检测检测磁体132的角度变化。
37.本技术提供的旋转角度识别装置100的有益效果在于:与现有技术相比,本技术的旋转角度识别装置100包括基座110、旋转件120和磁感应组件130,旋转件120在转动过程中驱动检测移动件131移动,检测移动件131驱动检测转动件134和检测磁体132转动,检测磁感应元件133检测检测磁体132的角度变化,从而可以测算旋转件120的转动角度,磁感应的方式具有非电接触的特点,能够提高旋转角度识别装置100的使用可靠性和安全性,此外,与检测磁场移动位移的磁感应技术相比,检测磁场角度变化的磁感应技术的检测精度更高,可识别更精细的旋转角度。
38.基座110可以由多个零件组成,作为旋转角度识别装置100的零部件的安装基础。
39.旋转件120可相对于基座110转动。旋转件120的传动面121与磁感应组件130的检测移动件131配合,可将旋转件120的旋转运动转化为检测移动件131的移动。
40.检测移动件131的一端被配置为与传动面121保持接触,迫使检测移动件131与传动面121保持接触的作用力,可以是弹性作用力、气压产生的压力、磁性力或者重力。旋转件120在转动过程中驱动检测移动件131移动,检测移动件131驱动检测转动件134和检测磁体132转动,检测磁感应元件133检测检测磁体132的角度变化,从而可以测算旋转件120的转动角度。对于检测移动件131驱动检测转动件134转动的实现方式,即将线性移动转换为旋转的实现方式,可以采用现有技术,也可以采用图11至图15所示的结构方案。
41.旋转角度识别装置100采用磁感应的方式检测传动面121的位置尺寸变化,磁感应不受灰尘、脏污、环境光的影响,具有较高的可靠性,特别适合工作环境较为恶劣的使用场景。检测磁体132可以是永磁体,例如磁铁。
42.检测磁感应元件133可以检测检测磁体132产生的磁场的角度变化。检测磁感应元件133可以包括霍尔传感器、各向异性磁电阻(anisotropic magnetoresistance,缩写为amr)、巨磁电阻(giant magnetoresistance,缩写为gmr)和隧道磁电阻(tunnel magnetoresistance,缩写为tmr)中的任意一种或多种。霍尔传感器可以采用现有的可以检测磁场角度的三轴霍尔传感器。
43.检测移动件131的移动位移和检测磁体132的转动角度可以建立起一一对应的关系,根据检测磁感应元件133检测到角度信息可以推算检测移动件131的移动位移,从而测算旋转件120的转动角度。在一些情况下,检测磁体132的转动角度和旋转件120的转动角度可以是1:1的关系,从而简化计算旋转件120的角度的算法。
44.与检测磁场移动位移的磁感应技术相比,例如线性霍尔,检测磁场角度变化的磁
感应技术的检测精度更高,可识别更精细的旋转角度。在一些情况下,旋转件120转动360
°
,检测移动件131移动10毫米,检测转动件134和检测磁体132转动360
°
,与线性霍尔检测10毫米位移相比,本技术采用的检测磁感应元件133检测360
°
的磁场角度变化,检测精度更高,可识别旋转件120的更精细的旋转角度。
45.参见图1,在一些示例中,旋转件120的传动面121可以位于旋转件120的沿轴向的一端且传动面121的轴向位置尺寸随着旋转件120的转动而变化。传动面121的轴向高度随着旋转件120的转动而变化,检测移动件131的移动方向沿旋转件120的轴向设置,由此,旋转过程中传动面121可以驱动检测移动件131上下移动。可选地,传动面121可以包括围绕旋转件120的旋转轴线设置的螺旋斜面。
46.实施例二:参见图2,在另一些示例中,旋转件220的传动面221可以位于旋转件220的外周且传动面221的径向位置尺寸随着旋转件220的转动而变化。传动面221的半径随着旋转件220的转动而变化,检测移动件131的移动方向沿旋转件220的径向设置,由此,旋转过程中传动面221可以驱动检测移动件131左右移动。具体地,旋转件220可以呈现为凸轮,传动面221包括围绕旋转件220的旋转轴线设置的凸轮面,凸轮面到旋转件220的旋转轴线的距离随着旋转件220的转动而变化。如图2所示,旋转件220的转动轴心为o点,沿逆时针方向,传动面221依次具有a点、b点、c点、d点和e点,且传动面221的半径逐渐增大,由此,旋转件220在转动过程中可以驱动检测移动件131移动。
47.实施例三:参见图3,进一步地,旋转件320可以呈现为偏心轮,其转动轴心为o点。旋转件320的传动面321 沿逆时针方向依次具有h点、i点、j点和k点,j点的半径大于i点的半径,k点的半径可以等于j点的半径。在旋转件320的转动过程中,检测磁感应元件133检测旋转件320的径向尺寸的变化,对于j点和k点,两者半径相等,控制系统可以根据径向尺寸的变化规律而判断与检测移动件131接触的是j点还是k点。
48.对于图1和图2所示的技术方案,传动面121的轴向位置尺寸或径向位置尺寸变化的范围较大,在一些情况下,旋转件120和检测移动件131的受力峰值较大,零件容易磨损,或者对旋转件120的驱动较为困难,有必要缩小传动面121在一个旋转周期内的位置尺寸变化范围。图3所示的技术方案可解决该技术问题。图3所示的旋转件320的传动面321可以分为两部分:上半圈和下半圈。在一个旋转周期内,传动面321的径向尺寸可以先由小变大,继而由大变小,由此,可以缩小传动面321在一个旋转周期内的位置尺寸变化范围。
49.实施例四:参见图4,在一些示例中,旋转角度识别装置400包括基座110、旋转件420、磁感应组件130和区间判断组件440。
50.旋转件420的传动面421包括多个首尾相接的传动区间,且传动区间的数量为偶数,沿着预定旋转方向,相邻的两个传动区间的轴向位置尺寸或径向位置尺寸的变化趋势相反。例如,传动面421可以包括左侧的传动区间421(a)和右侧的传动区间421(b)。传动区间的数量为偶数,任意两个相邻的传动区间在连接处可以是平缓过渡的,避免形状突变而导致检测移动件131难以在两个传动区间之间切换(例如图1和图2所示的情况),此外,还可以缩小传动面421在一个旋转周期内的位置尺寸变化范围。
51.在一些示例中,各个传动区间上均至少有一个取值点,且不同的取值点的轴向位置尺寸不同,当检测移动件131位于取值点时,检测磁感应元件133反馈的信号被读取。在某些应用场景,旋转件420可以设有数量确定的卡位,取值点的数量和卡位的数量一致,可以在每个取值点设置卡位槽。在旋转件420转动过程中,当检测移动件131位于取值点时,控制系统读取检测磁感应元件133反馈的信号,从而得知旋转件420的转动角度。在这种情况下,因为不同的取值点的轴向位置尺寸不同,所以不需要设置区间判断组件440。这个技术原理同样适用于图3所示的方案,即传动面321设有多个取值点,且不同的取值点的径向位置尺寸不同。
52.优选地,旋转角度识别装置400设有区间判断组件440。旋转件420设有多个围绕旋转件420的旋转轴线设置的区间参考部,区间参考部与传动区间一一对应地配置,区间判断组件440用于识别不同的区间参考部。因为区间判断组件440可以识别不同的区间参考部,所以控制系统可以得知检测移动件131处于哪个传动区间。对于区间判断组件440识别不同的区间参考部所采用的技术手段,可以采用现有技术,也可以采用图4所示的技术方案。
53.进一步地,旋转件420设有多个首尾相接的区间参考面422,多个区间参考面422围绕旋转件420的旋转轴线设置,不同的区间参考面422的轴向位置尺寸不同,区间判断组件440用于识别区间参考面422的位置;传动面421包括多个首尾相接的传动区间,沿着预定旋转方向,相邻的两个传动区间的轴向位置尺寸的变化趋势相反,区间参考面422的数量与传动区间的数量相同。在旋转件420的旋转过程中,磁感应组件130检测到传动面421的轴向位置尺寸变化,因为传动面421分为多个部分,包括多个首尾相接的传动区间,例如图示左侧的传动区间421(a)和右侧的传动区间421(b),传动面421上存在轴向位置尺寸相等的多个点,例如p点和q点,所以有必要采取措施令控制系统识别检测移动件131接触的是p点还是q点。
54.旋转件420设有多个首尾相接的区间参考面422,区间参考面422的数量与传动区间的数量相同,区间参考面422和传动区间可以一一对应起来。不同的区间参考面422的轴向位置尺寸不同,区间判断组件440识别区间参考面422的位置,控制系统根据区间判断组件440的反馈则可判断检测移动件131所接触的是哪个传动区间,即识别检测移动件131接触的是p点还是q点。由此,即便断电重启,控制系统也可以别检测移动件131接触的是p点还是q点。
55.参见图4,在一些示例中,左侧的区间参考面422(a)和右侧的区间参考面422(b)的轴向位置尺寸不同,区间判断组件440沿轴向设置;左侧的传动区间421(a)和右侧的传动区间421(b)的轴向位置尺寸的变化趋势相反。
56.实施例五:参见图5,在另一些示例中,左侧的区间参考面522(a)和右侧的区间参考面522(b)的径向位置尺寸不同,区间判断组件440沿径向设置;左侧的传动区间521(a)和右侧的传动区间521(b)的轴向位置尺寸的变化趋势相反。
57.区间判断组件检测区间参考面的位置,采用的技术方案可以包括激光距离传感器、磁性传感器或者行程开关。区间判断组件还可以采用磁感应检测距离的方式。
58.具体地,区间判断组件440包括参考移动件441、参考磁体442、参考磁感应元件443,参考移动件441的一端被配置为与区间参考面422保持接触,参考磁体442与参考移动
件441连接并跟随参考移动件441移动,参考磁感应元件443相对于基座110固定并用于检测参考磁体442的位置变化。旋转件420在转动过程中驱动参考移动件441和参考磁体442移动,参考磁感应元件443检测参考磁体442的位置变化,从而可以识别区间参考面422的位置。控制系统根据检测磁感应元件133和参考磁感应元件443的反馈,可以测算旋转件420的转动角度。在一些示例中,参考磁感应元件443可以是线性霍尔。
59.实施例六:请参见图6至图8,现对本技术实施例提供的旋转角度识别装置600进行说明。旋转角度识别装置600包括:基座610、旋转件620、磁感应组件630、区间判断组件640、显示模块672和视察辅助件680。旋转角度识别装置600的工作原理可以参照图5所示技术方案的工作原理。
60.旋转角度识别装置600可以包括多个旋转件620,多个旋转件620沿着径向由内到外依次套设,至少一个旋转件620配设有磁感应组件630。磁感应组件630的工作原理可以参照图1所示技术方案的工作原理。基于该磁感应检测方案的特点,各个旋转件620可以具有较简化的安装结构,其支撑和定位可以相互独立,在实践中,这种方式具有很大的优点,例如各个旋转件620的转动可以相互独立,各个旋转件620在转动过程中不会意外带动相邻的旋转件620转动,避免误操作。旋转件620的具体安装方案可参考本文对环形支撑结构614的描述。
61.旋转件620的外端面设有多个标识,多个标识围绕旋转件620的旋转轴线设置,相邻的两个旋转件620的标识可相互对准。具体地,多个旋转件620沿着径向由内到外依次为第一旋转件620a、第二旋转件620b、第三旋转件620c,第一旋转件620a设有第一标识651、第二旋转件620b设有第二标识652、第三旋转件620c设有第三标识653。所有旋转件620可以均配设有磁感应组件630。转动各个旋转件620,控制系统根据各个磁感应组件630的反馈,可以测算各个旋转件620的转动角度,从而判断第一标识651、第二标识652和第三标识653的对准状态。
62.根据不同的使用场景,各个标识可以是数字、字母或其它字符,还可以是图案。
63.旋转件620可以包括转盘部621、传动部622和参考部623,传动部622和参考部623位于转盘部621的同一侧且均围绕旋转件620的旋转轴线设置,传动部622设有传动面6221,参考部623设有区间参考面6231。磁感应组件630的检测移动件与传动部622的传动面6221接触,区间判断组件640的参考移动件641与参考部623的区间参考面6231接触。
64.图9和图10示出了其中一个旋转件620的结构。第一旋转件620a、第二旋转件620b、第三旋转件620c均可以具有图9和图10所示的结构。
65.参见图9和图10,传动部622的沿轴向的一端设有螺旋斜面,螺旋斜面作为传动面6221,参考部623位于传动部622的径向外侧。在旋转件620的转动过程中,螺旋斜面可以驱动检测移动件沿着轴向移动。在一些示例中,参考图9和图10,区间参考面6231可以设于参考部623的外周面,左侧的区间参考面6231(a)的半径小于右侧的区间参考面6231(b)的半径。在另一些示例中,参考图4,区间参考面可以设于参考部的沿轴向的一端。
66.在一些应用场景,旋转件620的具有使用价值的转动角度是离散分布的,旋转件620可以设有多个卡位,每个卡位上设有一个标识。
67.优选地,传动面6221上设有多个间隔分布的卡位槽6222,随着旋转件620的转动,
检测移动件的端部依次落入各个卡位槽6222。检测移动件的端部落入卡位槽6222,可以提高旋转件620维持在该卡位的稳定性,还可以改善用户转动旋转件620的手感。卡位槽6222的形状不限,例如可以呈球形,也可以呈方形。卡位槽6222与卡位或标识可以一一对应。
68.参见图7和图8,基座610设有容纳腔,容纳腔具有开口,磁感应组件630位于容纳腔内,旋转件620设于容纳腔的开口。具体地,基座610包括底座611和盖体613,底座611和盖体613围设形成容纳腔,盖体613设有供旋转件620露出的开口。
69.优选地,容纳腔内设有多个环形支撑结构614,旋转件620可转动地支撑于环形支撑结构614,则各个旋转件620可以独立地转动,相邻的旋转件620之间可以具有间隙,各个旋转件620在转动过程中不会意外带动相邻的旋转件620转动,避免误操作。例如,转动第二旋转件620b时,第一旋转件620a和第三旋转件620c不会被第二旋转件620b意外带动。
70.具体地,环形支撑结构614包括支撑座6141和环形凸筋6142,旋转件620设有围绕旋转件620的旋转轴线设置的环形套624,环形套624轴向支撑于支撑座6141,环形套624径向定位于环形凸筋6142。环形套624轴向支撑于支撑座6141,支撑座6141可以由多个独立的凸起构成。环形套624与环形凸筋6142的配合可以是轴孔配合,例如,环形套624的外侧与环形凸筋6142的内侧配合(如图8所示),或者环形套的内侧与环形凸筋的外侧配合。
71.参见图6,显示模块672设于最内侧的旋转件620的标识因旋转运动而形成的轨迹圈的内部,显示模块672用于显示与多个旋转件620的标识相互对准而形成的信息相关的内容。在一些示例中,第一旋转件620a可以呈环状,第一标识651设于环上,显示模块672设于环内。在另一些示例中,第一旋转件620a可以是实心的,显示模块672设于第一旋转件620a上并位于第一标识651因旋转运动而形成的轨迹圈的内部。显示模块672用于显示与各个标识对准而形成的信息相关的内容。在一些示例中,对于旋转件620的数量是两个的情况,第一标识651可以是指数(数字),第二标识652可以是底数(数字),显示模块672可以显示指数运算的公式及其运算结果。旋转角度识别装置600还可以设有扬声器,用于声音提示与第一标识651和第二标识652对准而形成的信息相关的内容,例如指数运算的结果。显示模块672可以是显示屏。
72.第一旋转件620a呈环状,中心安装件612设于第一旋转件620a的内侧,中心安装件612相对于基座610固定设置,显示模块672安装于中心安装件612。
73.参见图6,视察辅助件680相对于基座610固定设置,视察辅助件680位于旋转件620的轴向外侧,视察辅助件680设有视察窗681,处于对准状态的标识位于视察窗681内。视察辅助件680可以辅助或提示用户观看处于对准状态的标识。使用时,用户根据需求转动各个旋转件620,使得目标标识位于观察窗内,控制系统通过检测各个旋转件620的转动角度可识别位于观察窗内的标识,显示模块672可以显示与标识对准而形成的信息相关的内容。视察辅助件680可以与中心安装件612固定连接。
74.磁感应组件630可以采用多种技术方案实现其功能,例如图11所示的磁感应组件630a,图12所示的磁感应组件630b,图13至图15所示的磁感应组件630c。
75.参见图11,磁感应组件630a包括检测移动件631a、检测磁体632a、检测磁感应元件633a、检测弹性件634a、传动件635a、检测转动件636a、安装座637a。
76.安装座637a相对于基座610固定,安装座637a具有容纳腔,检测移动件631a、检测弹性件634a、检测转动件636a和检测磁体632a均设于容纳腔内,检测移动件631a可相对于
安装座637a移动,安装座637a的靠近传动面6221的一端设有供检测移动件631a露出的通孔,检测弹性件634a的两端分别抵接于安装座637a和检测移动件631a,检测转动件636a可相对于安装座637a转动。安装座637a可以包括上座和下座,上座和下座围设形成容纳腔,上座设有供检测移动件631a露出的通孔。
77.旋转件620的传动面6221位于旋转件620的沿轴向的一端且传动面6221的轴向位置尺寸随着旋转件620的转动而变化,检测转动件636a的旋转轴线与检测移动件631a的移动方向平行,检测磁体632a的磁化方向与检测转动件636a的旋转轴线垂直,检测磁感应元件633a位于检测磁体632a的沿轴向的一侧。由此,对于旋转件620的数量为多个的情况,每个旋转件620所对应的检测磁感应元件633a可以设置在同一个平面,便于将所有检测磁感应元件633a设置在同一个电路板,以提高数据传输性能和降低成本。
78.检测弹性件634a与检测移动件631a连接,检测移动件631a在检测弹性件634a的推动下与传动面6221保持接触。检测弹性件634a可以是弹簧。
79.检测移动件631a和检测转动件636a分别与传动件635a连接;检测移动件631a驱动传动件635a转动,传动件635a的旋转轴线与检测移动件631a的移动方向垂直,传动件635a驱动检测转动件636a转动。检测移动件631a可以具有齿条结构,检测转动件636a具有锥齿轮结构,传动件635a具有与齿条结构配合的直齿轮部和与锥齿轮结构配合的锥齿轮部。检测磁体632a与检测转动件636a固定连接。由此,检测移动件631a可以驱动传动件635a转动,传动件635a可以驱动检测转动件636a和检测磁体632a转动。
80.参见图12,磁感应组件630b包括检测移动件631b、检测磁体、检测磁感应元件633b、检测弹性件634b、传动件635b、检测转动件636b、安装座637b、弹力件638b。
81.检测移动件631b驱动传动件635b移动,传动件635b的移动与检测移动件631b的移动方向垂直,传动件635b驱动检测转动件636b转动。检测移动件631b具有第一斜面,传动件635b具有第二斜面,在弹力件638b的推动下,第二斜面与第一斜面保持接触,检测移动件631b下移的过程中推动传动件635b克服弹力件638b的弹力而后移。传动件635b具有齿条结构,检测转动件636b具有与齿条结构配合的齿轮部,检测磁体与检测转动件636b固定连接。传动件635b后移的过程中驱动检测转动件636b和检测磁体转动。
82.参见图13至图15,磁感应组件630c包括检测移动件631c、检测磁体632c、检测磁感应元件633c、检测弹性件634c、检测转动件636c、安装座637c。
83.检测移动件631c设有螺旋槽6311c,螺旋槽6311c围绕检测转动件636c的旋转轴线螺旋延伸,检测转动件636c设有插入螺旋槽6311c的凸起6361c。检测移动件631c下移的过程中,螺旋槽6311c的侧壁推动凸起6361c沿着螺旋槽6311c的路径移动,则检测转动件636c呈现为转动,即检测移动件631c上下移动可以驱动检测转动件636c和检测磁体632c转动。检测移动件631c可以中心对称地设有两个螺旋槽6311c,检测转动件636c设有相应的两个凸起6361c,螺旋槽6311c与凸起6361c一一对应地配合,从而提高传动力的均匀性。
84.参见图16,区间判断组件640包括参考移动件641、参考磁体642、参考磁感应元件643、参考弹性件644。参考弹性件644与参考移动件641连接,参考移动件641在参考弹性件644的推动下与区间参考面6231保持接触。参考弹性件644可以是弹簧。
85.进一步地,区间参考面6231设于旋转件620的外周,不同的区间参考面6231的径向位置尺寸不同;区间判断组件640还包括安装座646和两个穿插轴645,安装座646与基座610
固定连接,参考移动件641包括本体部6411、抵接部6412和组装部6413,抵接部6412用于接触区间参考面6231,参考磁体642安装于组装部6413,本体部6411设有两个过孔,过孔的轴线沿旋转件620的径向设置,两个过孔分别位于组装部6413的两侧,穿插轴645可移动地穿设于过孔,穿插轴645的一端与安装座646固定连接,另一端为大端,大端的外径大于过孔的直径,参考弹性件644与穿插轴645一一对应地设置,参考弹性件644套设于穿插轴645;参考弹性件644位于大端和本体部6411之间,或者参考弹性件644位于本体部6411和安装座646之间;参考磁感应元件643位于参考磁体642的沿旋转件620的轴向的一侧。两个穿插轴645分别位于组装部6413的两侧,由此,参考磁感应元件643可以位于两个穿插轴645之间且与参考磁体642正对地设置,从而改善区间判断组件640的空间结构,有利于提高磁感应的检测精度。穿插轴645可以呈现为螺栓。在一些示例中,如图16所示,参考弹性件644可以位于大端和本体部6411之间,参考弹性件644将参考移动件641推向靠近安装座646的位置。在另一些示例中,参考弹性件644也可以位于本体部6411和安装座646之间,参考弹性件644将参考移动件641推向远离安装座646的位置。在一些情况下,区间判断组件640也可以采用与磁感应组件630相同的结构。
86.根据不同的使用场景,第一标识651、第二标识652和第三标识653可以是数字、字母或其它字符,还可以是图案。
87.在一些示例中,本技术提供的旋转角度识别装置600可以作为学习用具,例如用于辅助学生学习算术,第一标识651和第三标识653可以是数字,第二标识652可以是运算符(加、减、乘、除)。
88.本技术还提供了一种旋钮,所述旋钮包括上述任何一种旋转角度识别装置。旋钮可以用于操控机电设备。各个旋转件可以作为旋钮的操控件,各个磁感应元件的输出信号可以传输至机电设备的控制系统,从而控制机电设备的工作。
89.本技术还提供了一种娱乐用具,所述娱乐用具包括上述任何一种旋转角度识别装置。娱乐用具的标识与学习用具的标识不同。在一些示例中,娱乐用具的第一标识可以是植物图案(动物的食物),第二标识可以是动物图案,当植物图案与动物图案正确地对应上后,显示模块可以显示相应的画面。在一些示例中,娱乐用具还可以设置在桌面上,作为玩桌面游戏的器具。
90.在一些示例中,本技术提供的旋转角度识别装置还可以应用于组合开关或电子密码锁。
91.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。