基于多重算法校正的gps历史轨迹方法及系统
技术领域
1.本发明涉及轨迹校正技术领域,尤其涉及基于多重算法校正的gps历史轨迹方法及系统。
背景技术:
2.一般的,如果用户进行长距离运动,其轨迹显示拉的相对较长,受限于gps本身定位精度,其轨迹在拉伸的情况下显示不会太粗糙难看。但如果用户在短距离跑圈模式下,受限于本身gps的定位精度,设备抓取到的定位点,在操场椭圆形跑道显示出来显得很是杂乱,用户需要花费较长时间才能从杂乱的轨迹中获得自己的历史轨迹信息。
3.现有的gps轨迹还存在位置点丢星和漂移的情况,在轨迹上会产生很多杂乱无序的位置点,容易混淆用户。
4.因此,提出一种基于多重算法校正的gps历史轨迹方法及系统,解决现有技术中存在的问题,是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种基于多重算法校正的gps历史轨迹方法及系统,在地图端描点进行有效校正,使历史轨迹比其它算法更有效率更加精准。
6.为了实现上述目的,本发明采用如下技术方案:
7.基于多重算法校正的gps历史轨迹方法,包括以下步骤:
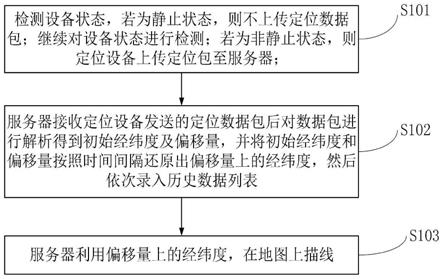
8.s101.检测设备状态,若为静止状态,则不上传定位数据包,继续对设备状态进行检测;若为非静止状态,则定位设备上传定位数据包至服务器;
9.s102.服务器接收定位设备发送的定位数据包后对数据包进行解析得到初始经纬度及偏移量,并将初始经纬度和偏移量按照时间间隔还原出偏移量上的经纬度,然后依次录入历史数据列表;
10.s103.服务器利用偏移量上的经纬度,在地图上描线,形成设备的历史轨迹。
11.可选的,s101中利用重力传感器检测设备状态。
12.可选的,s101中还包括定位数据包的获取过程:
13.s1011.设备上的重力传感器检测设备检测到设备震动,定位设备从gps串口每采样周期/n获取一次定位数据,n为正整数,依次比较每个采样周期的n次定位数据中的位置精度衰减因子,取位置精度衰减因子最小的一组定位数据作为当前采样周期定位数据缓存;
14.s1012.依当前采样周期定位数据的第1个点作为基准点,计算偏移量,计算公式如下:
15.parai=d
i 1-diꢀꢀꢀ
(1)
16.其中,di为第i个基准点,d
i 1
为第i 1个基准点,i≤n,i为正整数;
17.s1013.将定位数据和偏移量封装为定位数据包。
18.基于多重算法校正的gps历史轨迹系统,包括依次连接的数据获取模块、数据传输模块、数据处理和保存模块和地图描线模块;
19.数据获取模块,用于检测设备状态,若为静止状态,则不上传定位数据包,继续对设备状态进行检测;若为非静止状态,则定位设备上传定位数据包至服务器;
20.数据传输模块,用于将上传定位数据包传输至服务器;
21.数据处理和保存模块,用于服务器接收定位设备发送的定位数据包后对数据包进行解析得到初始经纬度及偏移量,并将初始经纬度和偏移量按照时间间隔还原出偏移量上的经纬度,然后依次录入历史数据列表;
22.地图描线模块,用于服务器利用偏移量上的经纬度,在地图上描线。
23.经由上述的技术方案可知,与现有技术相比,本发明提供了一种基于多重算法校正的gps历史轨迹方法及系统:从gps设备端定义上传高精度有效数据和数据上传逻辑,定位包采取偏移量上传方式至服务器,gps定位数据进行压缩,服务器端使用同步欧氏距离阙值限制误差对轨迹点的信息量评估和漂移过滤算法,并在地图端描点进行有效校正,使历史轨迹比其它算法更有效率更加精准。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
25.图1为本发明提出的基于多重算法校正的gps历史轨迹方法流程图;
26.图2为本发明提出的基于多重算法校正的gps历史轨迹系统结构框图;
27.图3为本发明在百度地图上描线示意图。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.参照图1所示,本发明公开了一种基于多重算法校正的gps历史轨迹方法流程图,该方法包括以下步骤:
30.s101.检测设备状态,若为静止状态,则不上传定位数据包,继续对设备状态进行检测;若为非静止状态,则定位设备上传定位数据包至服务器;
31.s102.服务器接收定位设备发送的定位数据包后对数据包进行解析得到初始经纬度及偏移量,并将初始经纬度和偏移量按照时间间隔还原出偏移量上的经纬度,然后依次录入历史数据列表;
32.s103.服务器利用偏移量上的经纬度,在地图上描线,形成设备的历史轨迹。
33.进一步的,s101中利用重力传感器检测设备状态。
34.更进一步的,s101中还包括定位数据包的获取过程:
35.s1011.设备上的重力传感器检测设备检测到设备震动,定位设备从gps串口每采样周期/n获取一次定位数据,n为正整数,依次比较每个采样周期的n次定位数据中的位置精度衰减因子,取位置精度衰减因子最小的一组定位数据作为当前采样周期定位数据缓存;
36.s1012.依当前采样周期定位数据的第1个点作为基准点,计算偏移量,计算公式如下:
37.parai=d
i 1-diꢀꢀꢀ
(1)
38.其中,di为第i个基准点,d
i 1
为第i 1个基准点,i≤n,i为正整数;
39.s1013.将定位数据和偏移量封装为定位数据包。
40.再进一步的,服务器接收到定位数据包(该数据包由经纬度和n=9个偏移量组成),初始经纬度:locationinit,偏移量:para1,para2……
para9,t1…
t9:为时间间隔,do为程序处理加工,list为经纬度仓库列表。初始经纬度加上偏移量根据时间间隔还原出偏移量上的经纬度,然后依次录入历史数据列表。这样每10个为1组经纬度数据包,有效保证了数据的准确性,同时经纬度 偏移量的方式增加了一次通讯传输的有效位置的内容量,提供了传输效率;其中,计算公式如下式:
41.list=locationinit do(locationinit para1*t1)
……
do(locationinit para9*t9)
ꢀꢀꢀ
(2)。
42.更进一步的,服务器有效位置识别,locationa为有效经纬度位置,locationb为a的紧后经纬度,timea为a经纬度时间,timeb为b的经纬度时间,discation为计算a与b的实际距离方法,list为经纬度数据仓库列表。如果5分钟内a与b点的距离大于10000米那么b点的经纬度则不录入历史数据库,如果小于10000米则录入历史数据库。具体如下逻辑公式:
43.list=distance(locationa,locationb,timeb-timea)》10000
ꢀꢀꢀꢀ
(3)
44.list=distance(locationa,locationb,timeb-timea)《10000
ꢀꢀꢀꢀ
(4)。
45.服务器有效位置识别,locationa为有效经纬度位置,locationb为a的紧后经纬度,timea为a经纬度时间,timeb为b的经纬度时间,list为经纬度数据仓库列表。如果b的经纬度时间小于a经纬度时间那么b点的经纬度则不录入历史数据库,如果大于则录入历史数据库。
46.list=timeb《timea
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
47.list=timeb》timea
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)。
48.进一步的,参见图3所示,为利用本发明提供的方法,在百度地图上进行描线,得到的校正后的历史轨迹。
49.参照图2所示,本发明还公开了一种基于多重算法校正的gps历史轨迹系统,包括依次连接的数据获取模块、数据传输模块、数据处理和保存模块和地图描线模块;
50.数据获取模块,用于检测设备状态,若为静止状态,则不上传定位数据包,继续对设备状态进行检测;若为非静止状态,则定位设备上传定位数据包至服务器;
51.数据传输模块,用于将上传定位数据包传输至服务器;
52.数据处理和保存模块,用于服务器接收定位设备发送的定位数据包后对数据包进行解析得到初始经纬度及偏移量,并将初始经纬度和偏移量按照时间间隔还原出偏移量上的经纬度,然后依次录入历史数据列表;
53.地图描线模块,用于服务器利用偏移量上的经纬度,在地图上描线,形成设备的历史轨迹。
54.对所公开的实施例的上述说明,按照递进的方式进行,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。