1.本发明涉及图像融合技术领域,尤其涉及一种基于边缘保留分解框架的多聚焦图像融合方法。
背景技术:
2.在数码相机等成像设备的应用中,镜头可以聚焦在特定距离的物体上,且同等距离的物体也能得到清晰的聚焦,但是,不同距离的物体会失焦从而造成模糊,因此,很难获得所有物体都聚焦的图像,而这可能会影响人类的视觉感知和进一步的计算机处理任务,获得全清晰图像的一个有效的解决方案就是多焦聚图像融合,多焦聚图像融合方法主要可分为两个分支,一是基于空域的融合算法,二是基于变换域的融合算法;
3.现有的融合方法会导致融合图像出现光晕伪影、丢失细节信息造成边缘模糊、对比度降低、清晰度下降等现象,且计算复杂度较高,因此,本发明提出一种基于边缘保留分解框架的多聚焦图像融合方法以解决现有技术中存在的问题。
技术实现要素:
4.针对上述问题,本发明的目的在于提出一种基于边缘保留分解框架的多聚焦图像融合方法,该基于边缘保留分解框架的多聚焦图像融合方法可有效地保留和锐化显著的边缘和脊,同时还可消除平滑子带中不需要的细节信息,并维护细节子带中的详细信息,且可充分保留图像的结构和细节信息,使最终融合图像的融合效果更适合于人类的视觉感知。
5.为实现本发明的目的,本发明通过以下技术方案实现:一种基于边缘保留分解框架的多聚焦图像融合方法,包括以下步骤:
6.步骤一、利用数码相机获取源图像并取任意两张源图像编号a和b;
7.步骤二、基于l1-pif变换构建边缘保留的图像分解框架,并利用分解框架对源图像a和b进行分解,获得对应的平滑子带和细节子带;
8.步骤三、根据下式的融合规则对平滑子带进行融合
[0009][0010]
其中sf表示融合的平滑子带,是源图像a的平滑子带,是源图像b的平滑子带,map表示最终决策图;
[0011]
步骤四、根据下式的融合规则对细节子带进行融合
[0012][0013]
其中表示第i个融合的细节子带,表示源图像a和b的第i个细节子带的决策图,和表示源图像a和b分解得到的细节子带;
[0014]
步骤五、根据下式将融合的平滑子带sf和融合的细节子带进行重构,获得最终的融合图像
[0015][0016]
式中if表示融合图像。
[0017]
进一步改进在于:所述步骤二中边缘保留的图像分解框架是通过迭代的利用l1-pif变换来分解源图像生成对应源图像的平滑子带和细节子带,所述细节子带是源图像减去平滑子带的结果。
[0018]
进一步改进在于:所述步骤三中最终决策图map由下式表示
[0019][0020]
其中s1表示当像素满足和的条件;s2表示当像素满足和的条件;s3-1表示在相应的内有多个值为“1”的像素;s3-2表示在相应的内有多个值为“0”的像素;是以异常像素ap(i,j)为中心的k
×
k的大小的图像块;和表示源图像a在第一次和第二次分解后的改进拉普拉斯算子函数的差异;和表示源图像b在第一次和第二次分解后的改进拉普拉斯算子函数的差异。
[0021]
进一步改进在于:所述源图像a和b在第一次和第二次分解后的改进拉普拉斯算子函数的差异由下式表示
[0022][0023][0024]
式中和即表示源图像a和b在第i次分解后sml函数的差异,smla(x,y)和smlb(x,y)分别表示源图像a和b中的像素(x,y)的函数值,和分别表示源图像a和b中第i级平滑子带的像素(x,y)的函数值。
[0025]
进一步改进在于:所述sml函数用于粗略估计图像的能量,所述sml函数由下式定义
[0026][0027]
其中p和q确定窗口的大小,ml(x,y)是指一张源图像中的每个像素(x,y)的改进拉普拉斯函数,用下式表示
[0028]
ml(x,y)=|2
×
(x,y)-i(x-step,y)-i(x step,y)| |2
×
(x,y)-i(x,y-step)-i(x,y step)|。
[0029]
进一步改进在于:所述步骤四中融合规则通过细节子带的能量来构建,每个细节子带的能量定义如下式
[0030][0031]
其中*表示源图像a和b中的一个;是指从a和b中的一个源图像分解的第i个细节子带的能量;表示源图像的第i个细节子带的像素;k
*
表示源图像的像素。
[0032]
进一步改进在于:所述步骤四中由下式计算
[0033][0034]
其中和分别表示从a和b中的一个源图像分解的第i个细节子带的能量;a为常数且a》0,当a赋予无限值时,由下分段函数计算
[0035][0036]
本发明的有益效果为:本发明通过构建边缘保留的图像分解框架,可有效地保留和锐化显著的边缘和脊,同时还可消除平滑子带中不需要的细节信息,并维护细节子带中的详细信息;
[0037]
根据平滑子带和细节子带各自的特点设计融合规则,可充分保留图像的结构和细节信息,使最终融合图像的融合效果更适合于人类的视觉感知。
附图说明
[0038]
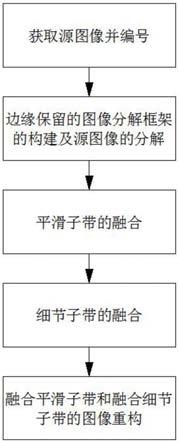
图1为本发明实施例一融合流程图。
[0039]
图2为本发明实施例一函数曲线图。
[0040]
图3为本发明实施例二验证实验流程图。
[0041]
图4为本发明实施例二四个指标曲线展示图。
具体实施方式
[0042]
为了加深对本发明的理解,下面将结合实施例对本发明做进一步详述,本实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
[0043]
实施例一
[0044]
根据图1、图2所示,本实施例提供了一种基于边缘保留分解框架的多聚焦图像融合方法,包括以下步骤:
[0045]
步骤一、利用数码相机获取源图像并取任意两张源图像编号a和b;
[0046]
步骤二、基于l1-pif变换构建边缘保留的图像分解框架,并利用分解框架对源图像a和b进行分解,获得对应的平滑子带和细节子带;
[0047]
其中边缘保留的图像分解框架是通过迭代的利用l1-pif变换来分解源图像生成
对应源图像的平滑子带和细节子带,所述细节子带是源图像减去平滑子带的结果,平滑子带有效地保留并削减突出边缘和脊,同时消除了微不足道的细节信息,而细节子带很好地保留了诸如纹理的细节(高频)信息;
[0048]
步骤三、根据下式的融合规则对平滑子带进行融合
[0049][0050]
其中sf表示融合的平滑子带,是源图像a的平滑子带,是源图像b的平滑子带,map表示最终决策图,由下式表示
[0051][0052]
其中s1表示当像素满足和的条件,表示源图像a的纹理细节比源图像b更丰富;
[0053]
s2表示当像素满足和的条件,表示源图像a的纹理细节远小于源图像b的细节;
[0054]
s3在两个分解期间满足梯度变化程度变化的幅度关系的剩余像素,这些像素正为异常像素(表示为ap(i,j)),是以异常像素ap(i,j)为中心的k
×
k的大小的图像块,分为以下两类:
[0055]
s3-1表示在相应的内有多个值为“1”的像素;
[0056]
s3-2表示在相应的内有多个值为“0”的像素;
[0057]
和表示源图像a在第一次和第二次分解后的改进拉普拉斯算子(sml)函数的差异;和表示源图像b在第一次和第二次分解后的改进拉普拉斯算子(sml)函数的差异,由下式表示
[0058][0059][0060]
式中和即表示源图像a和b在第i次分解后sml函数的差异,smla(x,y)和smlb(x,y)分别表示源图像a和b中的像素(x,y)的函数值,和分别表示源图像a和b中第i级平滑子带的像素(x,y)的函数值,其中sml函数用于粗略估计图像的能量,所述sml函数由下式定义
[0061]
[0062]
其中p和q确定窗口的大小,ml(x,y)是指一张源图像中的每个像素(x,y)的改进拉普拉斯函数,用下式表示
[0063]
ml(x,y)=|2
×
(x,y)-i(x-step,y)-i(x step,y)| |2
×
(x,y)-i(x,y-step)-i(x,y step)|;
[0064]
步骤四、融合规则通过细节子带的能量来构建,每个细节子带的能量定义如下式
[0065][0066]
其中*表示源图像a和b中的一个;是指从a和b中的一个源图像分解的第i个细节子带的能量;表示源图像的第i个细节子带的像素;k
*
表示源图像的像素,再根据下式的融合规则对细节子带进行融合
[0067][0068]
其中表示第i个融合的细节子带,表示源图像a和b的第i个细节子带的决策图,和表示源图像a和b分解得到的细节子带;
[0069]
其中由下式计算
[0070][0071]
其中和分别表示从a和b中的一个源图像分解的第i个细节子带的能量;a为常数且a》0,常数a越大,函数的类阈值越多;当常数a赋值接近0时,函数的值近似于固定常数0.5;当a赋予无限值时,由下分段函数计算
[0072][0073]
函数是平均和绝对极值选择之间的折中;
[0074]
步骤五、根据下式将融合的平滑子带sf和融合的细节子带进行重构,获得最终的融合图像
[0075][0076]
式中if表示融合图像。
[0077]
实施例二
[0078]
根据图3、图4所示,本实施例提供了一种基于边缘保留分解框架的多聚焦图像融合方法的验证试验步骤,包括
[0079]
步骤一、实验设置,将12个最新状态的多焦点图像融合算法与本技术的算法进行比较,包括基于传统变换域的融合算法dct,dvc和sswt,基于多尺度的融合算法mwgf和
bfmf,基于空域的融合算法imf和pc,基于深度学习的融合算法liu,以及具有边缘保留性的gif,mgff,gfdf和dsiftgff融合算法;
[0080]
然后通过结构相似性(ssim)指标、边缘保留和三个piella指标(q,qw和qe)来比较不同融合算法的性能,每个指标的度量值越大,融合质量越好。
[0081]
步骤二、参数选择,确定提出的融合算法的窗口大小k和函数计算公式中的参数a,由于两个参数存在大量组合,因此应用了经验方法以减少计算复杂性,即当探索窗口大小k的影响时,参数a固定为1,而当选择参数a的最佳值时,窗口大小k固定为3;
[0082]
包括qw和qe在内的四个用于参数选择的客观指标被计算,结果展示如说明书附图4所示,从说明书附图4(a)可以看出,随着k(窗口大小)在[4,5]的间隔增加时,所有评估指标基本上都会减小,因此,窗口大小k可以合理地设置为3;从说明书附图4(b)可以看出,随着变量a的增加,所有四个指标都会增加,更大的a值对于客观指标更有利。
[0083]
步骤三、融合质量的对比,选取五对源图像,并选择一对源图像作为代表并放大相应融合图像的局部区域,以便更清楚地展示出融合算法之间的差异,在五对源图像中两对源图像属于用于参数选择的图像集,另外三对源图像不属于用于参数选择的图像集,由此对融合质量进行比对。
[0084]
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
