1.本发明属于航空障碍灯领域,涉及风机叶片上航空灯系统及控制方法。
背景技术:
2.目前,风力机航空灯的安装位置一般位于机舱上,难以正确示意风力机叶片正确的高度和轮廓,存在一定的缺陷。而在风力机叶片叶尖处安装航空障碍灯虽然相较于机舱安装更好的示意风力机叶片的形状,但是常亮的叶尖航空灯不但会造成资源的浪费,甚至会随着叶片转动而生成一条炫目的灯带,引发危险。并且在风力机转动时,叶片的变形程度对指示风力机高度也有一定的影响。风力机转动时,由于载荷的影响会使风力机叶片产生变形,其中风力机叶片运行中最主要的载荷来源为重力载荷、惯性载荷以及气动载荷。叶片的变形会降低叶片的寿命,增加运行风险,增加叶片数值分析的难度,对安装在叶尖的航空灯的指示作用产生影响。
技术实现要素:
3.本发明所要解决的技术问题是提供一种智能判别风力机叶片形变,保证叶片在最高点时航空灯点亮的风力机航空灯系统及控制方法。
4.为解决上述技术问题,本发明采用的技术方案是:
5.本发明首先提供一种风力机航空灯系统,包括:
6.航空灯,用于在点亮时警示;
7.第一监测装置,用于实时采集风力机转速、入流速度和入流角;
8.第二监测装置,包括安装在叶根的转动磁芯和安装在机舱内的磁电式感应传感器,通过转动磁芯周期性切割磁电式感应传感器的磁感线,输出电压en;
9.计算装置,用于根据第一监测装置实时采集的风力机转速、入流速度和入流角,计算叶片抵消形变量后叶片位置对应的输出电压区间;
10.控制装置,用于当输出电压en进入所述计算装置计算得到的输出电压区间,点亮所述航空灯。
11.本发明还提供了一种风力机航空灯控制方法,包括:
12.实时采集安装在叶根的转动磁芯周期性切割磁电式感应传感器磁感线所产生的电压en及风力机转速、入流速度和入流角;
13.根据采集的风力机转速、入流速度和入流角,计算叶片抵消形变量后叶片位置对应的输出电压区间,计算叶片转动即将到达最高点的触发时间;
14.根据触发时间设定触发时间区间,一旦判定进入该触发区间,点亮航空灯。
15.与现有技术相比,本发明的有益效果是:本发明一种风力机航空灯系统及控制方法,航空灯连接风力机的监控系统,实时采集风速、风向、入流角等数据,智能判别风力机叶片的形变,能够及时、有效地指示叶片到达最高点的正确位置,保证叶片在最高点时航空灯点亮。
附图说明
16.图1是本发明风力机航空灯系统结构示意图;
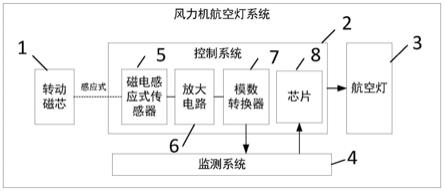
17.图2是本发明风力机航空灯系统结构框图。
18.图3是控制方法流程图。
19.图中:1、转动磁芯;2、控制系统;3、监测系统;4、航空灯;5、磁电感应式传感器;6、放大电路;7、模数转换器;8、芯片。
具体实施方式
20.下面结合附图,对本发明作详细说明:
21.如图1、图2所示,本发明风力机航空灯系统,包括:
22.航空灯4,用于在点亮时警示;
23.监测系统3,包括第一监测装置和第二监测装置。
24.第一监测装置,用于实时采集风力机转速、来流速度和来流角;
25.第二监测装置,包括安装在叶根的转动磁芯1和安装在机舱内的磁电式感应传感器5,通过转动磁芯1周期性切割磁电式感应传感器5的磁感线,输出电压en;
26.计算装置,用于根据第一监测装置实时采集的风力机转速、来流速度和来流角,计算叶片抵消形变量后叶片位置对应的输出电压区间;
27.控制装置,用于当输出电压en进入所述计算装置计算得到的输出电压区间,则点亮所述航空灯。
28.在一个实施例中,控制装置采用芯片8。芯片8控制航空灯3的开关。
29.在一个实施例中,计算装置包括放大电路6、模数转换器7以及芯片8。磁电感应式传感器5输出电压,经由放大电路6放大之后传入模数转换器7,输出高低电平,接入芯片8。
30.本发明风力机航空灯系统的控制方法以下几个步骤:
31.s1,叶根安装的转动磁芯1周期性切割磁电式感应传感器5的磁感线;转动磁芯1与磁电感应式传感器5相对位置改变,输出电压en改变,其中叶根的不同形变量会引发转动磁芯与传感器的相对位置不同,造成磁电感应式传感器5输出电压的改变;
32.s2,输出电压经由放大电路6放大,传递至模数转换器7;
33.s3,模数转换器7输出电压信号,进入监测系统4,监测系统4实时采集风机风速、入流角等相关信息,利用封装的计算规则进行计算模拟,计算叶片抵消形变量后叶片位置对应的输出电压区间,计算叶片转动即将到达最高点的触发时间;
34.s4,监控系统4设定触发时间区间,一旦判定进入该触发区间,输出由低电平跃变为高电平,同时给芯片8发送信号,点亮航空灯3。
35.s5,监控系统4判定即将跳出该触发区间,输出由高电平变为低电平,同时给芯片8发送信号,航空灯3熄灭。
36.步骤s1中封装的计算规则为:
37.s101,将叶片分解成叶素,即叶片剖面的翼型,利用动量守恒定律求解不同载荷对叶片剖面翼型切向(风轮旋转方向)产生的力矩。
38.s102,通过叶片材料的曲率,通过对沿叶片长度的弯矩积分,拟合叶片不同长度位置弯矩曲线。
39.s103,根据弯矩曲线计算出叶片不同长度位置形变量曲线。
40.s104,利用遗传算法,求出不同风力机运行状态下,叶根轴切向形变量与叶尖轴向形变量的对应关系。
41.进一步地,步骤s101的不同载荷分别为重力、惯性力、空气动力载荷,其中重力载荷为:
[0042][0043]
其中,ρ0为剖面折算密度;f0为剖面面积;g为重力加速度。
[0044]
空气动力载荷为:
[0045][0046][0047]
其中,ρ为空气密度;w为相对来流速度;c为剖面翼型弦长;来流角;
[0048]
离心力载荷为:
[0049]qxp
=ρ0f0rω2c
[0050]qyp
=ρ0f0yω2c
[0051]
其中,ρ0为剖面折算密度;f0为剖面面积;ω为风轮旋转角速度。
[0052][0053]
其中,ρ为空气密度;w为相对来流速度;c为剖面翼型弦长;来流角。计算装置计算叶片抵消形变量后叶片位置对应的输出电压区间的方法是:预测叶片即将到达最高点时,对应的小磁钢位置处的叶片形变量区间;通过预测对应的小磁钢位置处的叶片形变量区间,计算α的最大区间:
[0054][0055]
式中,min(d)为转动磁芯与传感器相对距离的最小值,可直接测量得到。根据计算得到的α的最大区间,得出输出电压区间。
技术特征:
1.一种风力机航空灯系统,其特征在于,包括:航空灯,用于在点亮时警示;第一监测装置,用于实时采集风力机转速、来流速度和来流角;第二监测装置,包括安装在叶根的转动磁芯和安装在机舱内的磁电式感应传感器,通过转动磁芯周期性切割磁电式感应传感器的磁感线,输出电压en;计算装置,用于根据第一监测装置实时采集的风力机转速、来流速度和来流角,计算叶片抵消形变量后叶片位置对应的输出电压区间;控制装置,用于当输出电压en进入所述计算装置计算得到的输出电压区间,则点亮所述航空灯。2.根据权利要求1所述的风力机航空灯系统,其特征在于,所述线圈感应电动势为:e=nblnsinα式中,e为线圈感应电动势;n为线圈匝数;b为磁场强度;l为线圈长度;n为风力机转速,α为线圈方向和和磁场方向夹角。3.根据权利要求2所述的风力机航空灯系统,其特征在于,线圈方向和和磁场方向夹角α为:式中,w
y
为叶片y方向变形量;w
x
为叶片x方向变形量;d为转动磁芯与传感器相对距离。4.根据权利要求3所述的风力机航空灯系统,其特征在于,所述计算装置计算叶片抵消形变量后叶片位置对应的输出电压区间的方法是:预测叶片即将到达最高点时,对应的小磁钢位置处的叶片形变量区间;通过预测对应的小磁钢位置处的叶片形变量区间,计算α的最大区间:式中,min(d)为转动磁芯与传感器相对距离的最小值;根据计算得到的α的最大区间,得出输出电压区间。5.根据权利要求4所述的风力机航空灯系统,其特征在于,预测叶片即将到达最高点时对应的小磁钢位置处的叶片形变量区间的方法,包括:利用结构动力学方程,根据叶片各个截面形变量,提取特征值矩阵,修正多自由度下不同风力机运行状态下,得到叶尖形变量下对应的小磁钢位置处的叶片形变量;其中,动力学方程为:其中,m为质量矩阵,c为阻尼矩阵,k为刚度矩阵,q
xw
q
a
q为叶片外荷载,其中,q
xw
为重力载荷;q
a
为空气动力载荷;q为离心率载荷;u为位移向量;通过系统内置软件迭代求解位移向量u,即叶片的偏移量,分解得到叶片的形变量w
y1
以及w
x1
;判断w
y1
以及w
x1
与离散化求解的w
y
以及w
x
误差;若误差在系统内置的可信度范围之内,更新w
y
为原来w
y
以及w
y1
均值;w
x
为w
x
以及w
x1
均
值;若误不在系统内置的可信度范围之内,则更正迭代精度,直至在系统内置的可信度范围,更新w
y
为原来w
y
以及w
y1
均值;w
x
为w
x
以及w
x1
均值。6.根据权利要求1所述的风力机航空灯系统,其特征在于,所述计算装置包括放大电路和模数转换器,放大电路用于放大所述第二监测装置输出的电压en;模数转换器用于将放大电路放大的电压信号输出为数字信号。7.一种风力机航空灯控制方法,其特征在于,包括:实时采集安装在叶根的转动磁芯周期性切割磁电式感应传感器磁感线所产生的电压en及风力机转速、来流速度和来流角;根据采集的风力机转速、入流速度和入流角,计算叶片抵消形变量后叶片位置对应的输出电压区间,计算叶片抵消形变量后叶片位置对应的输出电压区间;当输出电压en进入所述计算装置计算得到的输出电压区间,点亮航空灯。8.根据权利要求7所述的一种风力机航空灯控制方法,其特征在于,根据采集的风力机转速、来流速度和来流角,计算叶片抵消形变量后叶片位置对应的输出电压区间,包括:根据采集的风力机转速、来流速度和来流角,计算叶片受到的不同载荷;将叶片分解成叶素,利用动量守恒定律计算不同载荷对叶片剖面翼型切向产生的力矩;通过叶片材料的曲率,通过对沿叶片长度的力矩积分,计算叶片不同长度位置弯矩;通过对叶片离散化计算,计算得出:结合公式:其中,η为沿翼型弦长方向,ξ方向垂直于η,β为η方向与y轴方向的夹角;ψ
x
为x方向角位移,ψ
y
为y方向角位移;j
ξ
为为ξ方向惯性矩,j
n
为η方向惯性矩;k
x
为x方向曲率,k
y
为y方向曲率;m
η
为η方向的极惯性轴的弯矩,m
ξ
为ξ方向的极惯性轴的弯矩;k为离散化节点;δz为节点k和k-1之间的距离;e为弹性模量;为节点k对应x方向弯矩;为节点k对应y方向弯矩;为节点k-1对应x方向弯矩;为节点k-1对应y方向弯矩;为节点k对应y方向剪力;为节点k对应x方向剪力;为节点k对应y方向载荷;为节点k对应x方向载荷;为节点k-1对应y方向载荷;为节点k-1对应x方向载荷;为边界值,均等于0;据计算叶片不同长度位置弯矩,计算出叶片不同长度位置形变量;
其中,w
x
为x方向位移;w
y
为y方向位移;ψ
x
为x方向角位移,ψ
y
为y方向角位移;计算出叶片不同长度位置形变量,得到各个截面形变量w:利用结构动力学理论,根据计算的各个截面形变量w,提取特征值矩阵,修正多自由度下不同风力机运行状态下,叶尖形变量下对应的小磁钢位置处的叶片形变量;其中,动力学方程为:其中,m为质量矩阵,c为阻尼矩阵,k为刚度矩阵,q
xw
q
a
q为叶片外荷载;u为位移向量。9.根据权利要求7所述的一种风力机航空灯控制方法,其特征在于,根据采集的风力机转速、来流速度和来流角,计算叶片受到的不同载荷步骤中,不同载荷分别为重力、惯性力、空气动力载荷;重力载荷为:其中,q
xw
为重力载荷;ρ0为剖面折算密度;f0为剖面面积;g为重力加速度;来流角;空气动力载荷为:空气动力载荷为:其中,q
xa
为轴向空气动力载荷;q
ya
为y方向空气动力载荷;ρ为空气密度;v为相对来流速度;c为剖面翼型弦长;c
l
升力系数;c
d
阻力系数;离心力载荷为:q
xp
=ρ0f0rω2cq
yp
=ρ0f0yω2c其中,q
xp
为轴向离心力载荷;q
yp
为y方向离心力载荷;ρ0为剖面折算密度;f0为剖面面积;ω为风轮旋转角速度。10.根据权利要求9所述的一种风力机航空灯控制方法,其特征在于,将叶片分解成叶素,利用动量守恒定律计算不同载荷对叶片剖面翼型切向产生的剪力,而后得出x方向、y方向、η方向及ξ方向的弯矩;计算得到的不同载荷对叶片剖面翼型切向产生的剪力为:其中:
g
r
=e-0.125(bλ-21)
0.1其中,t
x
为x方向剪力,t
y
为y方向剪力;c
n
为法向力系数;c
t
为切向力系数;λ叶尖速比;r叶根距;dr为叶素厚度;λ为叶尖速比;b为叶片数量;x方向、y方向、η方向及ξ方向的弯矩为:方向、y方向、η方向及ξ方向的弯矩为:其中,m
x
为x方向的弯矩;m
y
为y方向上的弯矩;m
η
为η方向极惯性轴的弯矩,m
ξ
为ξ方向极惯性轴的弯矩。
技术总结
本发明公开了一种风力机航空灯系统及控制方法,其中风力机航空灯系统包括:航空灯,用于在点亮时警示;第一监测装置,用于实时采集风力机转速、来流速度和来流角;第二监测装置,包括安装在叶根的转动磁芯和安装在机舱内的磁电式感应传感器,通过转动磁芯周期性切割磁电式感应传感器的磁感线,输出电压En;计算装置,用于根据第一监测装置实时采集的风力机转速、来流速度和来流角,计算叶片抵消形变量后叶片位置对应的输出电压区间;控制装置,用于当输出电压En进入所述计算装置计算得到的输出电压区间,则点亮所述航空灯。本发明避免叶片变形对叶片位置的影响,正确示意叶片在最高处时航空障碍灯点亮,保证飞行物的安全。保证飞行物的安全。保证飞行物的安全。
技术研发人员:庄晓武 苏春喜 徐东寅
受保护的技术使用者:羲和电力有限公司
技术研发日:2022.03.01
技术公布日:2022/5/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。