1.本发明涉及快递驿站运输领域,尤其涉及一种无人化快递驿站运输装置及其操作方法。
背景技术:
2.物流(英文名称:logistics)原意为“实物分配”或“货物配送”,是供应链活动的一部分,是为了满足客户需要而对商品、服务消费以及相关信息从产地到消费地的高效、低成本流动和储存进行的规划、实施与控制的过程。物流以仓储为中心,促进生产与市场保持同步。物流是为了满足客户的需要,以最低的成本,通过运输、保管、配送等方式,实现原材料、半成品、成品及相关信息由商品的产地到商品的消费地所进行的计划、实施和管理的全过程。
3.物流由商品的运输、配送、仓储、包装、搬运装卸、流通加工,以及相关的物流信息等环节构成。
4.物流活动的具体内容包括以下几个方面:用户服务、需求预测、定单处理、配送、存货控制、运输、仓库管理、工厂和仓库的布局与选址、搬运装卸、采购、包装、情报信息。
5.物流的概念最早是在美国形成的,起源于20世纪30年代,原意为“实物分配”或“货物配送”。1963年被引入日本,日文意思是“物的流通”。20世纪70年代后,日本的“物流”一词逐渐取代了“物的流通”。其实其也就是我们所俗称的快递。
6.现有快递驿站运作模式大致为:员工手动将快递上架、取件时深入快递隔间手动取出。
7.此运作模式较为传统、工作效率较低;人力上架易发生疏漏使上架位置错误;取件时易发生偷窃、错拿等情况;在取件高峰期通道拥挤、取件缓慢。因此提出一种无人化快递驿站运输装置及其操作方法
技术实现要素:
8.本发明的目的在于提供一种无人化快递驿站运输装置及其操作方法,解决了现有的快递驿站通过员工手动将快递上架、取件时深入快递隔间手动取出,效率低下,其易导致快件的错拿以及丢失的问题。
9.为实现上述目的,本发明提供如下技术方案:一种无人化快递驿站运输装置,包括输送底座、传送皮带、安装底座、连接件、支架脚,所述安装底座上固定连接有多个货架纵向固定杆,各个所述货架纵向固定杆连接有货架机构,并通过货架机构承接有第一快递货箱,所述安装底座上固定安装有下导向滑轨,且下导向滑轨的上方设置有横向载体块,所述横向载体块的两侧均转动连接有第一链轮,且横向载体块两侧面的两端均转动连接有下滚轮,并通过下滚轮滚动设置在下导向滑轨上,所述横向载体块上安装有第一电机箱,所述第一电机箱的上端固定连接有竖直滑轨,且竖直滑轨上滑动设置有取货机构。
10.优选的,货架机构包括货架横向固定杆、支撑卡爪、紧固螺栓、承载横杆、第一快递
货箱,各个所述货架纵向固定杆的上端固定连接有货架横向固定杆,每个所述货架纵向固定杆的一侧均阵列固定安装有支撑卡爪,相邻两个所述支撑卡爪之间固定连接有承载横杆。
11.优选的,相邻的两个所述承载横杆上承接有第一快递货箱。
12.优选的,取货机构包括第二电机箱、上滚轮、外部移动调整导轮、支撑竖杆、上导向滑轨、控制屏、竖向导向滑轨、传动齿轮、导向滑板、传动齿条、第二快递货箱、滑轨限位销,所述竖直滑轨的上端固定连接有第二电机箱,且第二电机箱的两侧均安装有上滚轮与外部移动调整导轮,所述安装底座的上端固定连接有支撑竖杆,且支撑竖杆的上端固定连接有上导向滑轨,两侧的所述上滚轮分别与上导向滑轨的两侧贴合滑动连接,所述竖直滑轨内滑动设置有竖向导向滑轨,且竖向导向滑轨上设置有传动齿轮,所述竖向导向滑轨内滑动设置有导向滑板,且导向滑板的下端固定连接有传动齿轮。
13.优选的,所述上导向滑轨与下导向滑轨互相平行设置,且均与支撑竖杆垂直设置,所述支撑竖杆的一侧固定安装有控制屏。
14.优选的,所述传动齿条与各自一侧的传动齿轮啮合连接,所述竖向导向滑轨的一侧安插有滑轨限位销。
15.一种无人化快递驿站运输装置的操作方法,包括以下步骤:
16.s1:云大脑使用数据库等技术实现数据的增删改查;
17.s2:货架可自动存取,收到运输机器人及云大脑信号后实现将快递从运输机器人装入货架或将快递从货架取出放入运输机器人;
18.s3:运输机器人路径规划的实现:先通过激光雷达及深度相机进行slam建图,完成后作为全局地图,再使用move base全局路径规划与teb局部路径规划避障相结合,实现多个运输机器人同时运动;
19.s4:云大脑、运输机器人、货架、人机交互端之间使用wifi保持通信从而确保信息实时更新。
20.与相关技术相比较,本发明提供的一种无人化快递驿站运输装置及其操作方法具有如下有益效果:
21.1、本发明提供一种无人化快递驿站运输装置及其操作方法,通过上述各种固定件活动件的相互配合,启动本装置后,可以通过第一电机箱内的电机带动第一链轮转动,而第一链轮可以通过链条带动下下滚轮转动,进而带动下滚轮在下导向滑轨上滚动,使得横向载体块带动第一电机箱以及其上的竖直滑轨、取货机构沿下导向滑轨进行左右的滑动,而取货机构上可以通过第二电机箱内的电机带动传动齿轮转动,进而通过传动齿轮与传动齿条的啮合连接,带动传动齿条推动导向滑板在竖向导向滑轨内前后滑动,以带动其分别移动至货架机构上不同的位置对快递货箱进行取放,而货架机构通过以上的设置,使得第一快递货箱可以承接在两侧的承载横杆上,使得第一快递货箱的下方为镂空,进一步方便导向滑板对其的取放。
22.2、本发明提供一种无人化快递驿站运输装置及其操作方法,通过在整个系统工作时,中心处理系统将会分配快递所在货架信息,货架控制系统在收到信号后将进行取货动作,通过横向移动系统移动至快递所在的列,通过竖直取货系统移动至快递所在的行,在取出快递储物箱之后取货装置将会运动到货架右下角的出货位置,将快递储物箱放置在快递
运送机器人上。
附图说明
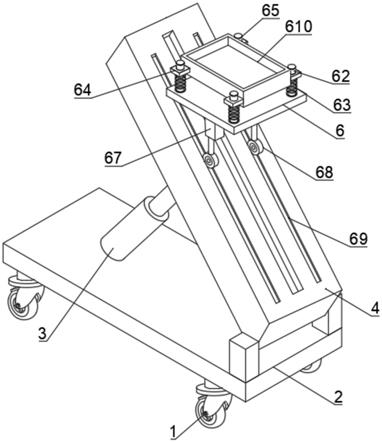
23.图1为本发明的一种无人化快递驿站运输装置的结构示意图。
24.图2为本发明的一种无人化快递驿站运输装置的仰视结构示意图。
25.图3为本发明的一种无人化快递驿站运输装置的俯视图。
26.图4为本发明的一种无人化快递驿站运输装置的右视图。
27.图5为本发明的一种无人化快递驿站运输装置的右视结构的剖视图。
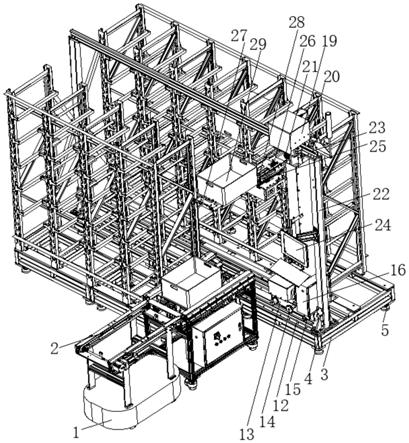
28.图6为本发明的一种无人化快递驿站运输装置的适用快递驿站场景图。
29.图7为本发明的一种无人化快递驿站运输装置的控制操作流程图。
30.图中:1、输送底座;2、传送皮带;3、安装底座;4、连接件;5、支架脚;6、货架纵向固定杆;7、货架横向固定杆;8、支撑卡爪;9、紧固螺栓;10、承载横杆;11、第一快递货箱;12、下导向滑轨;13、横向载体块;14、第一链轮;15、下滚轮;16、第一电机箱;17、竖直滑轨;19、第二电机箱;20、上滚轮;21、外部移动调整导轮;22、支撑竖杆;23、上导向滑轨;24、控制屏;25、竖向导向滑轨;26、传动齿轮;27、导向滑板;28、传动齿条;29、第二快递货箱;30、滑轨限位销。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.实施例一:
33.请参阅图1-7,本发明提供一种技术方案:一种无人化快递驿站运输装置,包括输送底座1、传送皮带2、安装底座3、连接件 4、支架脚5,安装底座3上固定连接有多个货架纵向固定杆6,各个货架纵向固定杆6连接有货架机构,并通过货架机构承接有第一快递货箱11,安装底座3上固定安装有下导向滑轨12,且下导向滑轨12的上方设置有横向载体块13,横向载体块13的两侧均转动连接有第一链轮14,且横向载体块13两侧面的两端均转动连接有下滚轮15,并通过下滚轮15滚动设置在下导向滑轨12上,横向载体块13上安装有第一电机箱16,第一电机箱16的上端固定连接有竖直滑轨17,且竖直滑轨17上滑动设置有取货机构,货架机构包括货架横向固定杆7、支撑卡爪8、紧固螺栓9、承载横杆10、第一快递货箱11,各个货架纵向固定杆6的上端固定连接有货架横向固定杆7,每个货架纵向固定杆6的一侧均阵列固定安装有支撑卡爪8,相邻两个支撑卡爪8之间固定连接有承载横杆10,相邻的两个承载横杆10上承接有第一快递货箱11,取货机构包括第二电机箱19、上滚轮20、外部移动调整导轮21、支撑竖杆22、上导向滑轨23、控制屏24、竖向导向滑轨25、传动齿轮26、导向滑板27、传动齿条28、第二快递货箱29、滑轨限位销30,竖直滑轨17的上端固定连接有第二电机箱19,且第二电机箱19的两侧均安装有上滚轮20 与外部移动调整导轮21,安装底座3的上端固定连接有支撑竖杆 22,且支撑竖杆22的上端固定连接有上导向滑轨23,两侧的上滚轮20分别与上导向滑轨23的两侧贴合滑动连接,竖直滑轨17内滑动设置有竖向导向滑轨
25,且竖向导向滑轨25上设置有传动齿轮 26,竖向导向滑轨25内滑动设置有导向滑板27,且导向滑板27的下端固定连接有传动齿轮28,上导向滑轨23与下导向滑轨12互相平行设置,且均与支撑竖杆22垂直设置,支撑竖杆22的一侧固定安装有控制屏24,传动齿条28与各自一侧的传动齿轮26啮合连接,竖向导向滑轨25的一侧安插有滑轨限位销30。
34.本实施方案中,通过上述各种固定件活动件的相互配合,启动本装置后,可以通过第一电机箱16内的电机带动第一链轮14转动,而第一链轮14可以通过链条带动下下滚轮15转动,进而带动下滚轮15在下导向滑轨12上滚动,使得横向载体块13带动第一电机箱16以及其上的竖直滑轨17、取货机构沿下导向滑轨12进行左右的滑动,而取货机构上可以通过第二电机箱19内的电机带动传动齿轮26转动,进而通过传动齿轮26与传动齿条28的啮合连接,带动传动齿条28推动导向滑板27在竖向导向滑轨25内前后滑动,以带动其分别移动至货架机构上不同的位置对快递货箱进行取放,而货架机构通过以上的设置,使得第一快递货箱可以承接在两侧的承载横杆10上,使得第一快递货箱11的下方为镂空,进一步方便导向滑板对其的取放。
35.实施例二:
36.请参阅图1-7所示,在实施例一的基础上,本发明提供一种技术方案:一种无人化快递驿站运输装置的操作方法,包括以下步骤:
37.第一步:云大脑使用数据库等技术实现数据的增删改查;
38.第二步:货架可自动存取,收到运输机器人及云大脑信号后实现将快递从运输机器人装入货架或将快递从货架取出放入运输机器人;
39.第三步:运输机器人路径规划的实现:先通过激光雷达及深度相机进行slam建图,完成后作为全局地图,再使用move base全局路径规划与teb局部路径规划避障相结合,实现多个运输机器人同时运动;
40.第四步:云大脑、运输机器人、货架、人机交互端之间使用 wifi保持通信从而确保信息实时更新。
41.本实施例中,
①
云大脑为整个驿站的大脑,负责信息统筹规划,一方面收集快递入库出库信息、给取件人发送取货通知、为快递分配存储位置向运输机器人发送目标信息,另一方面将已出库的快递信息删除。
42.②
运输机器人是快递入库出库的执行者,入库时接收云大脑指令将快递从入库处通过自主导航及全局路径规划运送到存储位置,出库时同理运输到出库处。
43.③
人与驿站交互端分为入库处和出库处。入库处分拣装置将快递放到运输机器人上并扫描快递面单使其信息入库,入库信息传输给云大脑,快递被运输机器人运走;出库处有若干个窗口,取件人取件前扫描取件码信息传递至云大脑、机器人开始运出快递,取货人走到窗口时显示屏上显示取货人信息,取货人扫码直接取走快递无需等待。
44.综上所述:本装置工作效率高,入库出库时间短。运输机器人整体及局部路径规划结合实现最优路径规划,使快递运入及运出速度加快。云大脑与货架、机器人实时信息统筹,运作准确且快速。
45.取件时间短,取件人分布分散。
46.快递存储量大,因为不限于人身高臂展拿取范围,故室内空间可以充分利用。
47.工作原理:使得本装置在安装使用时,通过智能控制操作,实现上述各种固定件活
动件的相互配合,进而启动本装置后,可以通过第一电机箱16内的电机带动第一链轮14转动,而第一链轮14可以通过链条带动下下滚轮15转动,进而带动下滚轮15在下导向滑轨12上滚动,使得横向载体块13带动第一电机箱16以及其上的竖直滑轨17、取货机构沿下导向滑轨12进行左右的滑动,而取货机构上可以通过第二电机箱19内的电机带动传动齿轮26转动,进而通过传动齿轮26与传动齿条28的啮合连接,带动传动齿条28推动导向滑板27在竖向导向滑轨25内前后滑动,以带动其分别移动至货架机构上不同的位置对快递货箱进行取放,而货架机构通过以上的设置,使得第一快递货箱可以承接在两侧的承载横杆10上,使得第一快递货箱11的下方为镂空,进一步方便导向滑板对其的取放。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。