1.本发明涉及永磁电机参数辨识领域,具体的是一种弧线形永磁电机模型参考自适应转动惯量辨识方法。
背景技术:
2.弧线电机采用定子分段式拼接的结构,相比于同口径普通永磁电机,弧线电机有着节约材料、易于安装和修理的优点,因此被广泛应用于机器人关节驱动、大口径天文望远镜直驱系统中。这些应用场合需要对位置高精度跟踪,且往往在很低的给定转速下工作,对于电机本体、编码器测量精度、控制策略都有很高的要求。而控制系统中,控制器和扰动观测器等的设计都需要用到电机模型,建立弧线电机的精确运动模型有助于对其进行精确控制。在低速时,摩擦的影响可以忽略不计,此时电机运动方程主要参数是转子的转动惯量。
3.对于转动惯量的辨识,分为离线与在线两类。离线辨识方法无法根据电机的运行状况进行实时调整,而在线辨识常用的方法有最小二乘法、扩展卡尔曼滤波法以及模型参考自适应法。其中,最小二乘与卡尔曼滤波算法较为复杂,计算量大,参数调试困难等缺陷。相比之下,模型参考自适应算法原理简单,但是在现有应用中,用转子转速表达式作为参考式与可调式,这样在低速时对于编码器测速精度要求很高,且受测速环节高频噪声的影响。
技术实现要素:
4.为解决上述背景技术中提到的不足,本发明的目的在于提供一种弧线形永磁电机模型参考自适应转动惯量辨识方法。
5.本发明的目的可以通过以下技术方案实现:
6.一种弧线形永磁电机模型参考自适应转动惯量辨识方法,所述辨识方法包括以下步骤:
7.s1、建立低速时表贴式永磁电机在dq轴坐标下的离散型运动模型;
8.s2、根据s1的离散运动模型推导系统的参考模型,将第k次运动方程与第k-1次、k-2次运动方程作差,消去负载转矩项;
9.s3、将s2所得的速度表达式、转矩表达式代入位移表达式中,将含有转动惯量j的系数作为待辨识参数;
10.s4、将s3推导的位移表达式作为参考模型,并由参考模型推导可调模型;
11.s5、修正转子位置测量值,并作为位置参考值;
12.s6、根据popov不等式建立待辨识参数的自适应率,根据位置参考与位置估计的差值调整辨识值,并将辨识结果在下一时刻更新。
13.进一步地,所述s1中建立弧线永磁电机dq轴运动模型基于以下条件:
14.1)低速运行时,忽略摩擦系数的影响;
15.2)采用id=0控制策略,电磁转矩仅有q轴电流产生;
16.3)各相绕组电感、电阻值恒定且相等。
17.进一步地,所述s1中的离散运动模型如下:
[0018][0019]
式中,k为第k次采样,ts为采样周期,θm为转子机械角度,ωm为转子机械角速度,te为电磁转矩,t
l
为负载转矩,iq为q轴电流,k
t
为转矩常数,j为待辨识的转动惯量,低速时忽略摩擦系数的影响。
[0020]
进一步地,所述s2推导得到的消去负载转矩的模型表达式为:
[0021][0022]
进一步地,所述s3得到的位移表达式为:
[0023][0024]
式中,b是待辨识参数。
[0025]
进一步地,所述s4得到的可调模型为:
[0026][0027]
式中,是第k次采样时转子位置的估计值,是第k次待辨识参数b的估计值。
[0028]
进一步地,所述s5中位置修正后得值为:
[0029]
θ
′m(k)=θm(k) ωm(k)tsꢀꢀꢀ
(5)
[0030]
式中θ
′m(k)是第k次修正的转子位置,修正后的值代替编码器采样位置作为参考值。
[0031]
进一步地,所述s6中建立的自适应率为;
[0032][0033]
式中,误差β为自适应增益参数,当收敛时,由式(7)计算得到转动惯量:
[0034][0035]
本发明的有益效果:
[0036]
1、本发明采用转子位移式作为参考模型和可调模型式,在低速时可以避免测速精度与测速算法噪声对辨识结果的影响;
[0037]
2、本发明采用三步位置信号,在位移方程中抵消了负载转矩,避免了额外负载扰动观测器的需求;
[0038]
3、本发明对位置信号进行了修正,使转子位移更加连续。
附图说明
[0039]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图;
[0040]
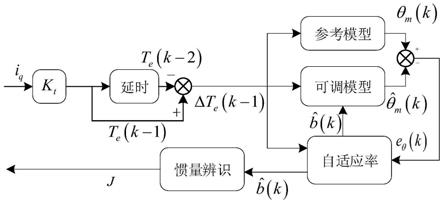
图1是本发明模型参考转动惯量辨识模块原理示意图;
[0041]
图2是本发明所适用的弧线电机矢量控制总体系统原理示意图;
[0042]
图3是本发明与基于转速的模型参考自适应辨识方法的效果对比示意图。
具体实施方式
[0043]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0044]
如图1和图2所示,本发明的弧线电机矢量控制采用双闭环控制结构,外环为速度环,采用pi控制器,内环为采用id=0控制策略的电流环,三相电流经过park变换得到dq轴电流,q轴电流与编码器位置信号作为惯量辨识算法的输入,辨识结果用于构建扰动观测器、卡尔曼速度观测器等。其中,弧线形永磁电机模型参考自适应转动惯量辨识方法的步骤如下:
[0045]
s1、建立低速时表贴式永磁电机在dq轴坐标下的离散型运动模型;
[0046]
s1中建立弧线永磁电机dq轴运动模型基于以下条件:
[0047]
1)、低速运行时,忽略摩擦系数的影响;
[0048]
2)、采用id=0控制策略,电磁转矩仅有q轴电流产生;
[0049]
3)、各相绕组电感、电阻值恒定且相等。
[0050]
推导得到的永磁弧线电机离散运动模型如下:
[0051][0052]
式中,k为第k次采样,ts为采样周期,θm为转子机械角度,ωm为转子机械角速度,te为电磁转矩,t
l
为负载转矩,iq为q轴电流,k
t
为转矩常数,j为待辨识的转动惯量,低速时忽略摩擦系数的影响。
[0053]
s2、根据s1的离散运动模型推导系统的参考模型,将第k次运动方程与第k-1次、k-2次运动方程作差,消去负载转矩项;
[0054]
推导得到的消去负载转矩的模型表达式为:
[0055]
[0056]
利用前三个采样周期的转子位置与速度差构建当前采样周期的转子位置,相比于s1的普通运动模型,该模型抵消了负载转矩及其它干扰转矩的影响,避免额外增设转矩观测的麻烦。
[0057]
s3、将s2所得的速度表达式、转矩表达式代入位移表达式中,将含有转动惯量j的系数作为待辨识参数;
[0058]
得到位移表达式为:
[0059][0060]
式(3)对应于图1中的参考模型,式中,b是待辨识参数。
[0061]
s4、将s3推导的位移表达式作为参考模型,并由参考模型推导可调模型;
[0062]
s4得到的可调模型为:
[0063][0064]
式(4)对应于图1中的可调模型,式中,是第k次采样时转子位置的估计值,是第k次待辨识参数b的估计值。
[0065]
s5、修正转子位置测量值,并作为位置参考值;
[0066]
s5中位置修正后得值为:
[0067]
θ
′m(k)=θm(k) ωm(k)tsꢀꢀꢀ
(5)
[0068]
式中θ
′m(k)是第k次修正的转子位置,其目的在于使编码器测得的阶梯型位置信号接近光滑曲线,更符合转子实际转动的连贯性,用该值代替编码器采样位置作为参考值。
[0069]
s6、根据popov不等式建立待辨识参数的自适应率,根据位置参考与位置估计的差值调整辨识值,并将辨识结果在下一时刻更新;
[0070]
s6中建立的自适应率为;
[0071][0072]
上式对应于图1中的自适应率,式中,误差β为自适应增益参数,当收敛时,由式(7)计算得到转动惯量:
[0073][0074]
s4中利用转子位置作为参考,根据观测位置与编码器实测转子位置的误差,结合s6所设计的自适应率实时调整辨识结果,相比于其它模型参考自适应转动惯量辨识方法,这种方法可以有效避免转速的计算,从而在低速运行时避免转速计算不精确以及位置差分带来的噪声等影响。
[0075]
本发明采用转子位移式作为参考模型和可调模型式,在低速时可以避免测速精度与测速算法噪声对辨识结果的影响;采用三步位置信号,在位移方程中抵消了负载转矩,避免了额外负载扰动观测器的需求;对位置信号进行了修正,使转子位移更加连续。
[0076]
如图3所示,图中j1为本发明辨识结果,j2为基于速度信号的辨识结果,j为标定转
动惯量,其值是2.833
×
10-4
(kgm2),图3(a)中转子速度为0.5rpm,在15s时转子被钳住后释放,以速度为参考的辨识算法受干扰的影响较大,再次稳定后不能收敛到正确值。当转速下降到0.1rpm时,如图3(b)所示,接近可以测量到的临界转速,不准确的转速使得j2无法收敛到真实值。但是,在这个过程中,j1以角度为参考,不仅可以快速收敛到真值,而且受到干扰的影响较小。
[0077]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。