1.本实用新型涉及机器人技术领域,特别是涉及一种机器人底盘结构及机器人。
背景技术:
2.机器人底盘结构是驱动了机器人移动的核心机构,底盘结构的设计决定了机器人的行走能力的强弱。机器人时常行走在不平整地面,例如地面存在减速带、障碍物等阻碍时,机器人须越过障碍物后继续前行。如果机器人底盘结构的着地能力差,在越过障碍物时可能会造成机器人翻倒,影响机器人的工作。
技术实现要素:
3.因此,本实用新型的目的在于提供一种能够稳定行驶于不平整地面的机器人底盘结构及包含该机器人底盘结构的机器人。
4.为达到上述目的,本实用新型实施例的技术方案是这样实现的:
5.一种机器人底盘结构,包括底板、设置于所述底板下方的多个支撑轮、以及分别设置于所述底板相对两侧的一对悬挂式轮组件;所述悬挂式轮组件包括支撑座、滑动组件、弹性件、电机和驱动轮,所述支撑座连接于所述底板的上方,所述滑动组件沿竖直方向可滑动地设置于支撑座上,所述弹性件夹置于所述支撑座和所述滑动件之间,所述电机的机座与所述滑动组件连接,所述电机的输出轴与所述驱动轮连接。
6.优选地,所述支撑座包括两个支撑板以及连接于两个所述支撑板侧边的挡水板,两个所述支撑板间隔设置并连接于所述底板的上方,所述驱动轮位于两个所述支撑板之间,所述挡水板将所述驱动轮和所述机器人底盘结构的内部空间相隔离。
7.优选地,所述支撑座还包括连接于两个所述支撑板顶部的顶板,所述顶板上设置有沿竖直方向向下延伸的导向杆,所述滑动组件包括滑动支板、连接于所述滑动支板上的直线轴承和夹持块,所述直线轴承与所述导向杆滑动配合,所述电机的机座固定于所述夹持块内。
8.优选地,所述弹性件为螺旋弹簧,套设于所述导向杆上;或者,所述弹性件为弹片,一端连接于所述顶板上,另一端连接于所述滑动支板上。
9.优选地,所述滑动组件还包括连接于所述滑动支板上的线束导引件,所述挡水板上设置有供所述线束导引件穿过的避让孔,所述电机的电线在所述线束导引件的限位下弯折以送入机器人内部。
10.优选地,每个所述支撑座上设置有两个所述导向杆,所述滑动支板的相对两端均设置有所述直线轴承,所述夹持块位于所述滑动支板的中间位置。
11.优选地,所述机器人底盘结构还包括连接于所述底板上方的多个连接柱,所述连接柱的顶部与所述支撑座的顶部平齐。
12.优选地,所述支撑轮为万向轮,所述支撑轮的数量至少为三个,并沿所述底板的周向间隔布置。
13.优选地,所述底板的相对两侧均设置有避让槽,所述驱动轮位于所述避让槽内,所述支撑座设置于所述避让槽的边缘处。
14.此外,本实用新型还提供一种机器人,包括本体以及设置于所述本体底部的如上所述的机器人底盘结构。
15.本技术的上述方案中,由于机器人底盘结构包括底板、设置于底板下方的多个支撑轮以及设置于底板相对两侧的一对悬挂式轮组件。机器人的载重完全由多个支撑轮负载,而驱动轮始终是以固定的弹性预压力接触地面,无需承担机器人的载重,从而隔离了载重对电机的影响,能够极大的延长电机的使用寿命,且使得机器人运行更加平稳。此外,由于电机和驱动轮在支撑座上是上下直线活动的,在驱动轮上下活动过程中,底盘的轮距参数不会发生改变,使得在计算机器人里程计定位坐标时,不会因为轮距参数的变化而增加误差,提升了机器人里程计定位的稳定性。
附图说明
16.图1为本技术一实施例中机器人底盘结构的立体图;
17.图2为本技术实施例中机器人底盘结构的另一视角立体图;
18.图3为本技术实施例中悬挂式轮组件的立体图;
19.图4为本技术实施例中悬挂式轮组件去除驱动轮后的立体图。
20.附图标记说明:
21.100-底板、110-避让槽、200-支撑轮、300-悬挂式轮组件、310-支撑座、311-支撑板、312-挡水板、313-顶板、314-导向杆、315-连接孔、316-避让孔、320-滑动组件、321-滑动支板、322-直线轴承、323-夹持块、324-线束导引件、330-弹性件、340-电机、341-电线、350-驱动轮、400-连接柱。
具体实施方式
22.以下结合说明书附图及具体实施例对本实用新型技术方案做进一步的详细阐述。除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,并不是旨在于限制本实用新型。在以下描述中,涉及到“一些实施例”的表述,其描述了所有可能实施例的子集,但是应当理解的是,“一些实施例”可以是所有可能实施例的相同子集或不同子集,并且可以在不冲突的情况下相互结合。
23.另需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“竖直的”、“水平的”、“内”、“外”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
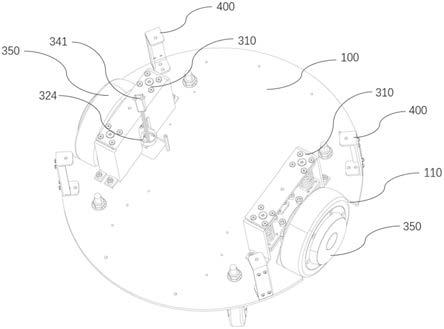
24.请结合参阅图1至图4,本技术一实施例提供一种机器人底盘结构,包括底板100、设置于底板100下方的多个支撑轮200、以及分别设置于底板100相对两侧的一对悬挂式轮组件300;其中,多个支撑轮200用于负责机器人的载重。悬挂式轮组件300为直线悬挂结构,具有运行稳定,支撑力线性度高的优点。悬挂式轮组件300包括支撑座310、滑动组件320、弹性件330、电机340和驱动轮350,支撑座310连接于底板100的上方,滑动组件320沿竖直方向
可滑动地设置于支撑座310上,电机340的机座与滑动组件320连接,电机340的输出轴与驱动轮350连接以驱动驱动轮350转动。滑动组件320可在支撑座310上沿竖直方向滑动从而使得驱动轮350可自适应地抬起或下落,以越过不平整的路面。弹性件330夹置于支撑座310和滑动件之间,将驱动轮350朝向地面压靠,保证驱动轮350始终以固定的弹性预压力接触地面。
25.本技术的上述方案中,由于机器人底盘结构包括底板100、设置于底板100下方的多个支撑轮200以及设置于底板100相对两侧的一对悬挂式轮组件300。机器人的载重完全由多个支撑轮200负载,而驱动轮350始终是以固定的弹性预压力接触地面,无需承担机器人的载重,从而隔离了载重对电机340的影响,能够极大的延长电机340的使用寿命,且使得机器人运行更加平稳。此外,由于电机340和驱动轮350在支撑座310上是上下直线活动的,在驱动轮350上下活动过程中,底盘的轮距参数不会发生改变,使得在计算机器人里程计定位坐标时,不会因为轮距参数的变化而增加误差,提升了机器人里程计定位的稳定性。
26.作为本实用新型的优选实施方式,支撑座310包括两个支撑板311以及连接于两个支撑板311侧边的挡水板312,两个支撑板311间隔设置并连接于底板100的上方,驱动轮350位于两个支撑板311之间,挡水板312将驱动轮350和机器人底盘结构的内部空间相隔离。两个支撑板311和挡水板312构成封挡结构,将驱动轮350和机器人底盘结构的内部空间相隔离,以避免机器人涉水时将水花溅到机器人底盘结构的内部空间,提高机器人底盘的适应能力。
27.进一步地,支撑座310还包括连接于两个支撑板311顶部的顶板313,顶板313上设置有沿竖直方向向下延伸的导向杆314,滑动组件320包括滑动支板321、连接于滑动支板321上的直线轴承322和夹持块323,直线轴承322与导向杆314滑动配合,电机340的机座固定于夹持块323内。顶板313可以与支撑板311和挡水板312进一步形成半包围式的结构,提高机器人底盘的防进水能力。此外,顶板313还可以用于连接机器人的上层结构,且作为载重的一部分构件。本实施方式中,顶板313上设置有沿竖直方向向下延伸的导向杆314,滑动支板321通过直线轴承322与导向杆314滑动配合,以减少滑动支板321上下滑动时的阻力。夹持块323将电机340的机座夹持,并固定于滑动支板321上,使得驱动轮350可以通过上下移动来适用高低不平的路面。进一步地,弹性件330可以为螺旋弹簧,套设于导向杆314上;或者,弹性件330为弹片,一端连接于顶板313上,另一端连接于滑动支板321上,将滑动支板321朝向地面挤压。进一步地,支撑座310上设置有两个导向杆314,滑动支板321的相对两端均设置有直线轴承322,滑动支板321的相对两端通过直线轴承322与两个导向杆314滑动配合,夹持块323位于滑动支板321的中间位置,使得驱动轮350位于支撑座310的中间位置。在附图所示实施例中,夹持块323由两块夹板通过螺栓连接将电机340的机座夹住,电机340的机座被收容于夹持块323内,电机340的输出轴朝向驱动轮350的轴向布置以连接驱动轮350的轮毂。
28.作为本实用新型的具体实施方式,滑动组件320还包括连接于滑动支板321上的线束导引件324,挡水板312上设置有供线束导引件324穿过的避让孔316,电机340的电线341在线束导引件324的限位下弯折以送入机器人内部。本实施方式中,线束导引件324用于束缚和引导电机340的电线341,电机340的电线341引出后可在引件的限位下弯折90度左右送入机器人内部,以避免滑动组件320滑动的过程中电线341与机身产生摩擦。
29.优选地,机器人底盘结构还包括连接于底板100上方的多个连接柱400,连接柱400的顶部与支撑座310的顶部平齐。连接柱400用于连接机器人的上层结构,支撑座310的顶部与连接柱400的顶部平齐使得支撑座310同样可以连接机器人的上层结构,共同形成对上层结构的支撑面。顶板313上还设置有连接孔315,连接孔315可以为螺丝孔,便于顶板313和上层结构的连接。本实施方式中,将连接柱400与支撑座310进行等高设计,可以实现在最小底盘面积下的最大层板受力面积,使得整个悬挂式轮组件300参与上层结构的承重,并且不影响悬挂式轮组件300的动作。
30.作为本实用新型的优选实施方式,支撑轮200为万向轮,支撑轮200的数量至少为三个,并沿底板100的周向间隔布置。支撑轮200作为承重的从动轮,在电机340和驱动轮350的驱动下,和驱动轮350协同完成机器人的移动。在附图所示实施例中,支撑轮200的数量为4个,以4点支撑的方式承载机器人。底板100呈圆盘状,底板100的相对两侧均设置有避让槽110,驱动轮350位于避让槽110内以保护驱动轮350,支撑座310设置于避让槽110的边缘处紧挨驱动轮350。
31.此外,本实用新型还提供一种机器人,包括本体以及设置于本体底部的如上的机器人底盘结构。本实用新型的机器人由于采用了上述的机器人底盘结构,机器人的载重完全由多个支撑轮200负载,而驱动轮350始终是以固定的弹性预压力接触地面,无需承担机器人的载重,从而隔离了载重对电机340的影响,能够极大的延长电机340的使用寿命,且使得机器人运行更加平稳。此外,在驱动轮350活动过程中,底盘的轮距参数不会发生改变,使得在计算机器人里程计定位坐标时,不会因为轮距参数的变化而增加误差,提升了机器人里程计定位的稳定性。
32.以上,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。本实用新型的保护范围应以所述权利要求的保护范围以准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。