1.本实用新型涉及微电机壳生产技术领域,尤其涉及一种微电机壳的高精度检测系统。
背景技术:
2.现有一种圆管状的微电机外壳,其主要应用于油泵电机外壳、汽车马达电机外壳、健身器材电机外壳和推杆式电机外壳等技术领域。为了确保微电机外壳的生产质量,需要对微电机外壳的长度尺寸进行检测,人工检测效率低下,为此提出一种微电机壳长度尺寸的检测系统。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种微电机壳的高精度检测系统,能够检测微电机壳的长度尺寸是否符合生产需要,且能自动上下料,使用方便。
4.技术方案:为实现上述目的,本实用新型的一种微电机壳的高精度检测系统,包括检测台和机壳输送台;所述检测台上设置有滑轨,第一气缸驱动滑动座沿所述滑轨水平滑动,所述滑动座上设置有容纳微电机壳的容纳槽,所述微电机壳为圆管状;所述机壳输送台上设置有斜向的送料槽,所述送料槽的斜下端与所述滑轨的一端相对,且所述送料槽的斜下端设置有控制微电机壳下落的开闭机构;所述检测台上沿滑轨朝远离机壳输送台的方向依次设置有长度检测机构和卸料机构;所述长度检测机构包括设置在滑轨两侧的固定板和测量板,固定板固定在检测台上,测量板在第二气缸的带动下朝靠近固定板的一侧横移;测量板上设置有检测测量板移动距离的位移传感器,检测台上设置控制器,控制器上设置有显示位移传感器数值的显示屏;所述固定板和所述测量板配合夹持微电机壳的两端以检测微电机壳的长度。
5.进一步地,所述开闭机构包括竖向的挡板和横向的插杆,所述挡板位于所述插杆的斜下方;所述挡板由第三气缸驱动竖向运动,所述挡板与所述送料槽插接配合;所述插杆由第四气缸驱动横向运动,所述插杆横向贯穿所述送料槽,所述插杆与送料槽内的微电机壳的内孔插接配合。
6.进一步地,所述送料槽的斜下端设置有封合送料槽顶部的封板,所述封板与所述送料槽底部的间距小于微电机壳直径的两倍。
7.进一步地,所述送料槽的斜下端还设置两个限位板,所述限位板延伸至滑轨一端的正上方;两个限位板分别对微电机壳的两端进行限位。
8.进一步地,所述容纳槽为倒置的等腰梯形。
9.进一步地,所述卸料机构包括设置在滑轨两侧的竖向推板和斜向滑板;所述竖向推板由第五气缸驱动横移,所述斜向滑板的斜下端延伸至检测台的一侧边缘,且检测台的该侧边缘的下方设置有收集微电机壳的收集筐。
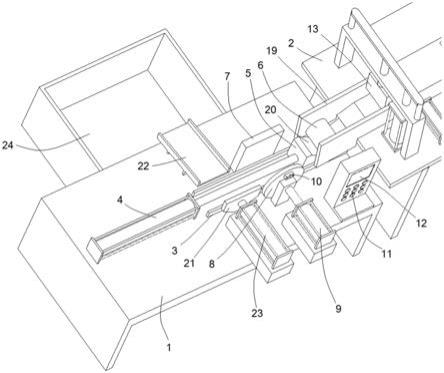
10.有益效果:本实用新型的一种微电机壳的高精度检测系统,将多个微电机外壳排列在送料槽内,在重力作用下微电机外壳滑至滑动座的容纳槽内,滑动座带动微电机外壳运动至固定板和测量板之间,测量板在气缸的带动下与固定板分别顶压微电机外壳的两端,测量板上设置有位移传感器,位移传感器可以检测测量板的移动距离,通过显示屏得到位移传感器的数值,与规定的合格数值区间进行对比,即可获知微电机外壳的长度尺寸是否合格。
附图说明
11.附图1为本实用新型的整体结构示意图;
12.附图2为送料槽的内部结构示意图;
13.附图3为送料槽的平面结构示意图;
14.附图4为滑动座位于送料槽出料口的示意图;
15.附图5为滑动座位于固定板和测量板之间的示意图;
16.附图6为滑动座位于竖向推板和斜向滑板之间的示意图。
具体实施方式
17.下面结合附图对本实用新型作更进一步的说明。
18.如附图1至6所述的一种微电机壳的高精度检测系统,包括检测台1和机壳输送台2。检测台1水平设置,所述检测台1上设置有水平的滑轨3,第一气缸4驱动滑动座5沿所述滑轨3水平滑动,所述滑动座5上设置有容纳微电机壳6的容纳槽20,所述微电机壳6为圆管状。
19.机壳输送台2斜向设置在检测台1的一侧,所述机壳输送台2上设置有斜向的送料槽16,所述送料槽16的斜下端与所述滑轨3的一端相对,且所述送料槽16的斜下端设置有控制微电机壳6下落的开闭机构,送料槽16内的微电机壳6在重力的作用下下滑,并由开闭机构控制微电机外壳6落在至滑动座5的容纳槽20内。
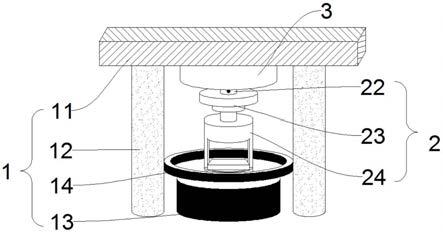
20.所述检测台1上沿滑轨3朝远离机壳输送台2的方向依次设置有长度检测机构和卸料机构。所述长度检测机构包括设置在滑轨3两侧的固定板7和测量板8,固定板7和测量板8均为竖向板体,固定板7固定在检测台1上,测量板8在第二气缸9的带动下朝靠近固定板7的一侧横移。测量板8上设置有检测测量板8移动距离的位移传感器10,检测台1上设置控制器11,控制器11上设置有显示位移传感器10数值的显示屏12。所述固定板7和所述测量板8配合夹持微电机壳6的两端以检测微电机壳6的长度。
21.本实用新型的检测原理如下:测量板8在第二气缸9的带动下与固定板7分别顶压微电机壳6的两端,位移传感器10可以检测出测量板8的移动距离,通过显示屏12得到位移传感器10的数值。事先确定长度尺寸合格的微电机壳6在经过长度检测机构时所应当得到的数值的最大值和最小值,建立合格数值区间,将实际测量中显示屏12中显示的数值与规定的合格数值区间进行对比,即可获知微电机壳4的长度尺寸是否复合标准。若合格,由卸料机构将微电机壳4送入收集筐24内;若不合格,由控制器11带动警报装置发出警报信号,并控制设备停止运动,由工作人员处理不合格的产品。
22.如附图2和3中所示,所述开闭机构包括竖向的挡板13和横向的插杆14,所述挡板13位于所述插杆14的斜下方。所述挡板13由第三气缸15驱动竖向运动,所述挡板13与所述
送料槽16插接配合。所述插杆14由第四气缸17驱动横向运动,所述插杆14横向贯穿所述送料槽16,所述插杆14与送料槽16内的微电机壳6的内孔插接配合。
23.开闭机构的工作原理如下:如附图2中所示,挡板13挡住最下端的微电机外壳,插杆14插入次下端的外壳。当需要送出外壳时,挡板13上移,使最下端的外壳滑出送料槽16,此时次下端的外壳在插杆14的限位作用下不会运动;而后挡板13下移复位,插杆14横向抽出,使次下端的外壳滑移至与挡板13相接,其余外壳依次滑落,插杆14复位插入,进入第二次输送循环。
24.所述送料槽16的斜下端设置有封合送料槽16顶部的封板18,所述封板18与所述送料槽16底部的间距小于微电机壳6直径的两倍,使得微电机壳6只能逐个从送料槽16中滑出。
25.所述送料槽16的斜下端还设置两个限位板19,所述限位板19延伸至滑轨3一端的正上方,两个限位板19分别对微电机壳6的两端进行限位,使得微电机壳6滑至容纳槽20内时仍保持横向状态。
26.所述容纳槽20为倒置的等腰梯形,对不同规格的微电机壳6具有较好地容纳限位作用。
27.所述卸料机构包括设置在滑轨3两侧的竖向推板21和斜向滑板22;所述竖向推板21由第五气缸23驱动横移,所述斜向滑板22的斜下端延伸至检测台1的一侧边缘,且检测台1的该侧边缘的下方设置有收集微电机壳6的收集筐24。如附图6中所示,检测完成后,合格的微电机壳6运动至竖向推板21和斜向滑板22之间,竖向推板21将微电机壳6推入斜向滑板22内,随后滑至收集筐24内进行收集。
28.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。