1.本发明涉及轨道交通传动系统及其它类似传动系统的故障诊断技术领域,具体涉及一种传动系统弛缓故障实时诊断方法。
背景技术:
2.目前在轨道交通传动系统的实际应用中,当出现雨雪等恶劣环境或车辆高速通过道岔等不良线路条件时,将导致铁轨的轨面黏着下降,列车易产生空转,此时列车对应的牵引电机速度会在短时间内大幅增加,从而导致传动系统的故障诊断模块误报弛缓故障。此外,当速度信号因电磁干扰等导致速度传感器采样脉冲增加或特定故障时,也将导致速度信号值异常上升,此时也将导致误报弛缓故障。
3.弛缓故障是齿轮传动系统的一种异常状态,故障表现形式主要为小齿轮与牵引电机的电枢轴配合失效、齿轮崩裂脱离电枢轴等。当小齿轮与电枢轴之间的过盈连接发生弛缓时,由于牵引力矩无法向从动齿轮输出,发生弛缓的牵引电机的转速将大大高于其它牵引电动机的转速,使空转保护装置发生作用,造成机车卸载。当发生小齿轮弛缓故障时,机车乘务员若仍按习惯使用空转切除开关切除空转保护作用,会导致产生“扫膛”事故,具有很大的安全隐患。而牵引电机空转,转速飞升,电枢轴与小齿轮之间摩擦产生大量的热量,导致电机轴承温度升高。轴承温度升高会导致小齿轮弛缓故障演变为小齿轮固死故障,与之关联的轮对不能转动,处理时需要切割机车故障电机的小齿轮,造成事故现场救援机车不能对事故列车直接作业。机车运行中如发生小齿轮弛缓故障,机车将被迫停车并申请紧急救援,会严重干扰铁路运输的正常秩序。综上所述,齿轮传动装置作为集机械和电子于一体的关键机械装备,用来将牵引电机转矩传递至列车,也是列车最基本最重要的关键装备之一,其出现故障将严重影响着整个列车的安全稳定运用。因此,研究齿轮传动系统弛缓故障的有效实时诊断方法,并解决上述问题,具有很好的工程应用价值和深远的现实意义。
4.针对上述问题结合现有技术中典型的机车齿轮传动系统结构(如附图1所示的结构),进一步描述如下:目前机车齿轮传动系统包括齿轮箱轴承01、电机轴承02、电枢轴03、测速磁盘04和速度传感器05等结构,齿轮箱内的从动齿轮与车轮相连,小齿轮与从动齿轮相连,牵引电机电枢轴与主齿轮(小齿轮)为锥度配合,即附图1中标识06所对应的锥度配合区,通过过盈传递扭矩。弛缓故障主要指小齿轮与牵引电机的电枢轴配合失效、齿轮崩裂脱离电枢轴等情况,其表现形式为齿轮传动系统与牵引电机、列车轮对之间有转差。
5.目前工程上对于弛缓故障诊断仍主要采用简单阈值超限报警方法,即基于牵引电机速度及其与同一列车其它牵引电机速度之间差值进行综合判断,具体为:若某轴牵引电机速度vi变化满足下列条件(1)或(2),则判断为该轴发生弛缓故障:
6.(1)某轴牵引电机速度vi大于h
v1
持续超过h
t1
;
7.(2)某轴牵引电机速度vi与其它牵引电机速度(v1,v2,...,v
i-1
,v
i 1
,...,vn)差值大于h
v2
持续超过h
t2
。
8.其中,h
v1
和h
v2
为基于工程应用经验设定的速度阈值,h
t1
和h
t2
为设定的时间阈值。
例如,对于和谐机车,h
v1
和h
v2
分别为140km/h和42km/h,h
t1
和h
t2
均为2s。
9.在列车运行过程中,列车牵引传动控制系统会基于各轴速度差来进行空转/滑行保护且牵引力的减载量、减载斜率、恢复斜率均随空转/滑行程度动态调节。当列车存在小齿轮弛缓故障时,由于牵引电机负载特性结构发生了变化,其牵引力响应规律与正常工况下会存在差异,因此,可结合列车各轴牵引力来进行综合分析。
10.进一步结合附图2,该图为现场出现两轴小齿轮弛缓故障的典型实例,图中各信号的定义如下表所示:
11.序号信号含义序号信号含义1dr牵引工况8ssf3速度传感器3故障标志2br制动工况9v11轴速度3inv1电机1运行状态10v22轴速度4inv2电机2运行状态11v33轴速度5inv3电机3运行状态12te1电机1牵引力6ssf1速度传感器1故障标志13te2电机2牵引力7ssf2速度传感器2故障标志14te3电机3牵引力
12.由此可以看出,出现两轴小齿轮弛缓故障时,两轴速度和实际牵引力均出现异常,且与当时所处的工况强相关。由于负载很小,牵引工况下,故障轴速度出现异常上升,但由于牵引传动控制系统对牵引力的动态闭环调节,故障轴实际速度会保持略高于其它轴且处于动态稳定状态;制动工况下,通过力矩动态调节使故障轴速度将低于正常轴速度,当故障劣化至齿轮轴完全断裂时,其速度将降至0附近。由图中还可以看出,当出现故障轴速度与正常轴速度差值超过一定阈值时,控制系统会误报出故障轴速度传感器故障,即图2中的信号“ssf2”。
13.综上所述,现有技术中的诊断方法存在诊断性能指标不高,且在速度传感器故障和轮对空转等相关异常工况下容易出现故障误报的不足之处。
技术实现要素:
14.本发明要解决的技术问题是,提供一种诊断性能指标更高,且在速度传感器故障和轮对空转等相关异常工况下不容易出现故障误报的传动系统弛缓故障实时诊断方法。
15.为解决上述技术问题,本发明提供的技术方案为:一种传动系统弛缓故障实时诊断方法,基于传动系统弛缓故障对应的各种特征模式均与一定时间周期内多个特征指标变化规律有关的前提,将特征模式识别问题转换成多变量时间序列匹配问题;并基于dtw算法将时间规整与距离测度结合起来,采用动态规划技术,比较两个大小不同的模式,以解决上述时间尺度不同步问题,以实现对传动系统弛缓故障特征模式的实时诊断。
16.作为优选,它具体包括如下步骤:
17.第一步,将诊断模块分为在线处理模块和离线处理模块两部分;在线处理模块负责处理实时工况数据,离线处理模块负责处理历史故障数据,同时对故障诊断阈值进行预设;
18.第二步,控制在线处理模块从车机系统的窗口显示数据中截取车辆运行的工况参数;并通过计算转换成时序特征指标;
19.第三步,对第二步中的各数据进行归一化处理;
20.第四步,控制离线处理模块导入传统系统的历史故障数据,并进行特征指标分析后转换成时序特征模式进行数据提取,将提取出的数据进行归一化处理后生成时序特征模式库;
21.第五步,控制在线处理模块结合第三步的数据和第四步的模式库,并引入动态时序规整算法进行相似度计算;
22.第六步,定义决策函数,结合第一步中设定的故障诊断阈值,采用累积和算法来进行诊断决策最终得出实时诊断结论。
23.作为进一步优选,时序特征指标对应的具体处理方法为:首先提取时序特征模式的模板;时序特征模式模板基于归一化处理后的数据进行建立;具体采用如下公式(1)~(5)对特征指标进行归一化处理,具体5个公式如下:
[0024][0025][0026][0027][0028][0029]
式中,dr、br和zo依次表示列车运行状态处于牵引工况、制动工况和惰行工况;为选定时间窗口内的n个j2和n个j3中的最大值;为选定时间窗口内的n个j2和n个j3中的最小值;为选定时间窗口内的n个j4和n个j5中的最大值;为选定时间窗口内的n个j4和n个j5中的最小值;经过上述公式处理后得到归一化后的各时序特征模式,如下表所示;
[0030][0031]
表中,每个时序特征模式模板均为长度5的时间序列。
[0032]
作为进一步优选,第五步中的相似度计算的具体方法为:得到第四步中所述的时序特征模式库后,基于dtw算法(动态时序规整算法)进行模式相似度计算;依据当前数据窗口截取的相关系统信号,包括工况信息,各轴牵引力和各轴速度,计算整个时间窗口内的时序特征指标j1~j5,再利用公式(1)~(5)进行归一化处理,得到当前时刻k的时间序列特征模式如下公式(6)所示;
[0033][0034]
式中,为特征指标j1~j5对应的时间序列,n为数据窗口内数据采样个数;同时定义相似度函数d
ij
(k)如下公式(7)所示,采用如下公式(8)计算当前时刻k数据窗口时序特征模式与时序模板j的相似度sj(k);
[0035][0036]
sj(k)=max(d
1j
(k),d
2j
(k),
…
,d
5j
(k))(8)
[0037]
式中,算子dtw表示运用dtw算法计算两个时间序列之间的最短距离,表示模式j中的第i个特征指标对应的时序模板。
[0038]
作为进一步优选,第六步中决策函数的具体设定方法为:设实际时序特征模式与模式mj进行相似度匹配时的相似度阈值依次为ts1~ts7,考虑到采样信号中存在一定程度的噪声和干扰,为提升故障检测的可靠性,结合cusum算法(累积和算法)来进行诊断决策;定义决策函数如下:
[0039]gj
(k)=max(0,gj(k-1) ts
j-sj(k))(9)
[0040]
综合考虑工况特征和具体模式,采取如下故障决策逻辑:
[0041][0042][0043]
式中,hj(j=1,2,
…
,6)为故障阈值。
[0044]
采用上述方法后,本发明具有如下有益效果:
[0045]
1、从系统角度入手,以系统异常信号为研究对象,基于系统信号的时序特征模式辨识,来实现故障的实时诊断。
[0046]
2、针对齿轮传动系统弛缓故障诊断问题,提出了一种基于dtw算法的实时诊断方法,并通过现场实际故障数据对所提方法进行验证。
[0047]
3、本方法在dfr和dd诊断性能指标上均远优于传统方法,且在速度传感器故障和轮对空转等相关异常工况下均可避免故障误报,较传统方法具有明显的优越性。
[0048]
综上所述,本发明提供了一种诊断性能指标更高,且在速度传感器故障和轮对空转等相关异常工况下不容易出现故障误报的传动系统弛缓故障实时诊断方法。
附图说明
[0049]
图1是现有技术中齿轮传动系统结构示意图。
[0050]
图2是现有技术中齿轮传动系统小齿轮弛缓故障实例图。
[0051]
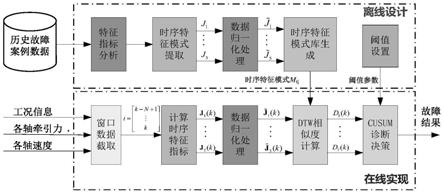
图3是本发明中基于时序特征模式识别的实时诊断方法原理框图。
[0052]
如图所示:01、齿轮箱轴承,02、电机轴承,03、电枢轴,04、测速磁盘,05、速度传感器,06、锥度配合区。
具体实施方式
[0053]
下面结合附图对本发明做进一步的详细说明。
[0054]
本发明公开了,一种传动系统弛缓故障实时诊断方法,基于传动系统弛缓故障对应的各种特征模式均与一定时间周期内多个特征指标变化规律有关的前提,将特征模式识别问题转换成多变量时间序列匹配问题;并基于dtw算法将时间规整与距离测度结合起来,采用动态规划技术,比较两个大小不同的模式,以解决上述时间尺度不同步问题,以实现对传动系统弛缓故障特征模式的实时诊断。
[0055]
进一步结合附图3,它具体包括如下步骤:
[0056]
第一步,将诊断模块分为在线处理模块和离线处理模块两部分;在线处理模块负责处理实时工况数据,离线处理模块负责处理历史故障数据,同时对故障诊断阈值进行预设;
[0057]
第二步,控制在线处理模块从车机系统的窗口显示数据中截取车辆运行的工况参数;并通过计算转换成时序特征指标;
[0058]
第三步,对第二步中的各数据进行归一化处理;
[0059]
第四步,控制离线处理模块导入传统系统的历史故障数据,并进行特征指标分析后转换成时序特征模式进行数据提取,将提取出的数据进行归一化处理后生成时序特征模式库;
[0060]
第五步,控制在线处理模块结合第三步的数据和第四步的模式库,并引入动态时序规整算法进行相似度计算;
[0061]
第六步,定义决策函数,结合第一步中设定的故障诊断阈值,采用累积和算法来进行诊断决策最终得出实时诊断结论。
[0062]
作为进一步优选,时序特征指标对应的具体处理方法为:首先提取时序特征模式的模板;时序特征模式模板基于归一化处理后的数据进行建立;具体采用如下公式(1)~(5)对特征指标进行归一化处理,具体5个公式如下:
[0063][0064][0065]
[0066][0067][0068]
式中,dr、br和zo依次表示列车运行状态处于牵引工况、制动工况和惰行工况;为选定时间窗口内的n个j2和n个j3中的最大值;为选定时间窗口内的n个j2和n个j3中的最小值;为选定时间窗口内的n个j4和n个j5中的最大值;为选定时间窗口内的n个j4和n个j5中的最小值;经过上述公式处理后得到归一化后的各时序特征模式,如下表所示;
[0069][0070]
表中,每个时序特征模式模板均为长度5的时间序列。
[0071]
作为进一步优选,第五步中的相似度计算的具体方法为:得到第四步中所述的时序特征模式库后,基于dtw算法(动态时序规整算法)进行模式相似度计算;依据当前数据窗口截取的相关系统信号,包括工况信息,各轴牵引力和各轴速度,计算整个时间窗口内的时序特征指标j1~j5,再利用公式(1)~(5)进行归一化处理,得到当前时刻k的时间序列特征模式如下公式(6)所示;
[0072][0073]
式中,为特征指标j1~j5对应的时间序列,n为数据窗口内数据采样个数;同时定义相似度函数d
ij
(k)如下公式(7)所示,采用如下公式(8)计算当前时刻k数据窗口时序特征模式与时序模板j的相似度sj(k);
[0074][0075]
sj(k)=max(d
1j
(k),d
2j
(k),
…
,d
5j
(k))(8)
[0076]
式中,算子dtw表示运用dtw算法计算两个时间序列之间的最短距离,表示模式j中的第i个特征指标对应的时序模板。
[0077]
作为进一步优选,第六步中决策函数的具体设定方法为:设实际时序特征模式与模式mj进行相似度匹配时的相似度阈值依次为ts1~ts7,考虑到采样信号中存在一定程度的噪声和干扰,为提升故障检测的可靠性,结合cusum算法(累积和算法)来进行诊断决策;定义决策函数如下:
[0078]gj
(k)=max(0,gj(k-1) ts
j-sj(k))(9)
[0079]
综合考虑工况特征和具体模式,采取如下故障决策逻辑:
[0080][0081][0082]
式中,hj(j=1,2,
…
,6)为故障阈值,实施时可基于业内技术人员的应用经验进行阈值设置。
[0083]
需要说明的是,本发明中涉及的部分英文缩写对应的名词解释如下:dtw表示:基于动态时序规整算法(dynamictimewarping);fdr表示故障检测率(faultdetectrate);dd表示:检测延时(delaydetection);,cusum表示累积和(cumulativesum)。
[0084]
以上对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的实现方式并不局限于此,其中齿轮传动系统弛缓故障诊断结构可采用其它同等结构来实现;时序模式相似序计算方法可采用其它公知的同类方法来实现;累积和进行故障诊断决策也可采用其它公知的同类方法来实现。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的方案及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。