技术特征:
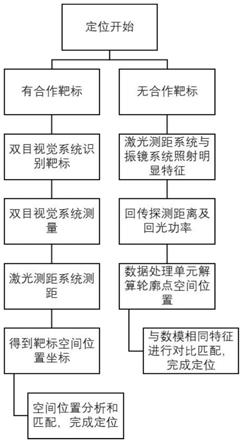
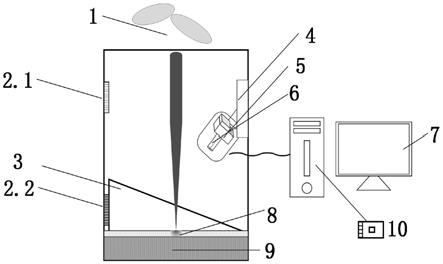
1.一种非接触式铺层定位仪定位方法,其特征在于:包括如下步骤:步骤一:判定工件是否有合作靶标标志点;步骤二:基于双目视觉系统或激光测距系统的工件精确定位;步骤三:系统解算得到靶标空间位置或轮廓空间位置;步骤四:基于高速振镜的三维激光投射。2.如权利要求1所述的一种非接触式铺层定位仪定位方法,其特征在于:步骤二的实现方法为:工件有合作靶标标志点,则采用双目视觉系统对标志点进行识别:由相机获得靶标点图像坐标,再由双目视觉系统对靶标点坐标进行测量,同时根据需要采用激光测距模块对靶标点进行测距,将距离信息代入解算,为铺层定位仪提供靶标点的位置信息,从而确定被加工工件的位置;工件无合作靶标标志点,则采用激光测距系统进行定位:将激光经过铺层定位仪所带有的振镜出射,对工件边缘特征点进行慢速扫描,在扫描的同时进行激光测距和回光功率记录,通过数据分析与导入的工件模型进行匹配比对,获得工件明显特征点所在空间位置的信息,从而确定被加工工件的位置。3.如权利要求1所述的一种非接触式铺层定位仪定位方法,其特征在于:步骤三的实现方法为:通过定位系统对工件多个靶标点或特征点的三维坐标进行精确测量,结合靶标点或特征点在工件中的位置坐标,经过坐标系配准,从而获取铺层定位仪坐标系与工件坐标系之间的位姿关系,完成三维激光投射系统在工件上投射激光图样准备工作。4.如权利要求1所述的一种非接触式铺层定位仪定位方法,其特征在于:步骤四的实现方法为:将步骤三获取的定位信息传输至铺层定位仪的控制计算机中,铺层定位仪对齐现实工件和模型坐标:将工件三维模型导入铺层定位仪控制计算机,在计算机中明确待投影位置和图样,计算机软件中生成图样在工件坐标系下三维点云,并通过铺层定位仪坐标系与工件坐标系之间的位姿关系,将三维点云转换为铺层定位仪坐标系下的三维坐标,由计算机软件规划路径,生成与三维点云信息对应的振镜转动角度信息,由计算机向振镜控制器发送角度信息指令,控制器控制振镜转动,形成激光图样,准确将激光投影至需要加工处,完成铺层定位三维激光投射工作。
技术总结
本发明公开的一种非接触式铺层定位仪定位方法,属于复合材料零件制造技术领域。本发明在工件定位时,首先根据工件类型判断工件是否有合作靶标标志点,如有合作靶标则采用双目视觉系统对标志点进行识别,结合激光测距系统将靶标换算出的坐标点输入至铺层定位仪控制计算机中完成对被测工件的空间定位。如无合作靶标,则采用激光测距模块与振镜扫描机构进行激光投射,寻找被测工件特征点并与导入的工件模型匹配,从而获得定位信息。本发明的铺层定位仪定位方法,智能化程度高,能够解决与工件零接触的空间定位问题,用一种定位方法实现所有在铺层定位仪测量范围内的不同形貌被测工件的空间定位。件的空间定位。件的空间定位。
技术研发人员:赵子越 贾志婷 瞿剑苏 宫思远 刘倩頔
受保护的技术使用者:中国航空工业集团公司北京长城计量测试技术研究所
技术研发日:2022.01.04
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。