1.本发明涉及脊柱外科领域,尤其涉及一种脊柱微创穿刺定位装置。
背景技术:
2.脊柱穿刺定位器用于体内深部脊柱某一靶点的穿刺定位,具体可用于椎间孔、椎间盘、关节突及椎弓根等脊柱各部位的穿刺定位。
3.随着微创脊柱外科、内镜脊柱外科、疼痛科及神经科等临床科室的发展,许多微创手术都需要通过穿刺针引导定位到达靶点、手术病灶或手术通道,例如椎间孔镜手术、经皮椎弓根螺钉内固定术、椎间盘射频消融术、神经根阻滞麻醉术等。
4.但是脊柱深部的靶点或手术区域极小,临近四周有许多重要神经、血管及内脏器官环绕,有时还需要避开坚硬的骨组织的遮挡。术者要严格按照术前设计的手术进针入路到达靶点,才能安全顺利地到达理想的手术区域,避免出现严重的手术并发症或后遗症。但对于新手而言,术者往往需要反复透视定位,反复调整穿刺针的方向、角度和深度,才能获得安全的进针路径和满意的针尖位置。反复穿刺多次透视增加了病患的痛苦和x线辐射,延长了手术时间,增大了手术风险和感染可能,甚至即使反复穿刺定位也不一定能够获得理想的靶点位置,从而明显降低了手术疗效。而且在x射线环境下工作,对于工作人员身体也有着很大的影响。
5.同时,现有的穿刺定位设备在大都采用角度测量器来确定穿刺进针角度,但是角度测量器作为板状物体,不会做得太大,从而会使角度操作的误差在靶点附近形成较大的距离误差。而且有些穿刺定位设备需要贴近人体使用,人体又不是理想的平面,也容易形成较大误差。
技术实现要素:
6.本发明是针对现有技术所存在的不足,而提供了一种结构简单、设计合理,避免了使用体积较小的角度测量器来定位,从而能减少杠杆式放大误差的几率;同时,导杆对称分布于丝杆两侧的结构,抗挠强度好,在入针时,能避免克氏针因受力偏转角度超出要求偏差,从而能使克氏针准确到达设定穿刺点;而且即使在x光的引导下进行穿刺,也不需要工作人员在现场,使工作人员得到合理的保护的一种脊柱微创穿刺定位装置。
7.为了实现上述目的,本发明提供了一种脊柱微创穿刺定位装置,包括基板,所述基板设置于手术床侧,所述基板上表面作为测量的z向基准面也即是xy平面,所述基板前侧设置有y向基准线,所述基板的左侧或右侧设置有x向基准线;所述基板设置有xz平面点定位机构,所述xz平面点定位机构包括于所述基板上表面固定设置的第一导杆,所述第一导杆垂直于xy平面,所述第一导杆滑动连接有第一升降座,所述第一升降座下侧活动连接有第一丝杆,所述第一丝杆活动连接有第一丝杆座,所述第一丝杆座固定设置于所述基板,所述第一丝杆穿过所述基板传动连接有第一电机;所述第一升降座固定连接有第二丝杆座,所述第二丝杆座活动连接有第二丝杆,
所述第二丝杆平行于x向基准线,所述第二丝杆一端活动连接有第一横移座,所述第一横移座固定连接有第二导杆,所述第二导杆滑动连接所述第一升降座,所述第二导杆穿过所述第一升降座固定连接有第二横移座,所述第二横移座固定连接有第二电机,所述第二电机传动连接所述第二丝杆;所述第二导杆穿过所述第一横移座且穿过所述第一横移座的端部绕其轴心转动连接有连接块,所述连接块设置有连接耳;所述基板并列设置有两套所述xz平面点定位机构,其中一套的所述连接耳铰接有穿刺针推进机构,另一套的所述连接耳铰接有导向筒,所述导向筒滑动连接所述穿刺针推进机构;所述穿刺针推进机构端部设置有克氏针,所述克氏针轴线与所述第二丝杆轴线位于同一平面。
8.其中,所述基板下表面固定设置有第三导杆,所述第三导杆平行于所述第一导杆,所述第三导杆滑动连接有第二升降座,所述第二升降座固定连接所述第一电机。
9.所述基板下表面至少设置有两个所述第三导杆,所述第三导杆位于以所述第一丝杆为轴心的同一个圆柱上,且所述第三导杆之间的相互间距相同。
10.所述第一升降座包括第一升降板,所述第一升降板两端设置有竖立的翼板,所述第二导杆与两端的所述翼板均滑动连接;所述第二丝杆穿过所述翼板,具体为所述翼板设置有使所述第二丝杆穿过的通孔,所述通孔与所述第二丝杆同心且所述通孔的直径大于所述第二丝杆;所述第二丝杆两侧均设置有所述第二导杆;所述第二丝杆座与所述第一升降板固定连接。
11.所述第一丝杆两侧均设置有所述第一导杆,其中一个所述第一导杆穿过所述第二丝杆与其左侧相邻的所述第二导杆之间,另一个穿过所述第二丝杆与其右侧相邻的所述第二导杆之间;两套所述xz平面点定位机构设置于所述基板上的四个所述第一导杆在xy平面的投影的连线构成梯形,且所述梯形的底边和顶边平行于y向基准线;所述梯形的底边相对顶边靠近所述穿刺针推进机构;所述第一导杆上端连接有顶板;所述第一丝杆和第二丝杆均设置有制动器。
12.每套所述所述xz平面点定位机构的所述第二导杆其中的一个穿过所述第一横移座,该所述第二导杆穿过所述第一横移座的端部固定连接有两个圆锥转子轴承或角接触球轴承,且两个所述轴承的大圈的受力侧面均背离另一个轴承;所述轴承外侧连接有所述连接块,所述连接块包括圆筒,所述圆筒与所述轴承之间设置有防止所述轴承向其大圈受力侧面方向移动的第一挡圈;所述第二导杆设置有防止所述轴承向其小圈受力侧面方向移动的第二挡圈。
13.所述导向筒与所述穿刺针推进机构之间设置有锁紧结构,所述锁紧结构包括设置于所述导向筒内侧且与所述导向筒固定连接的第一圆环,所述第一圆环侧面设置有锁紧块,所述锁紧块设置有锲形槽;所述锁紧结构还包括设置于所述导向筒内侧且与所述导向筒滑动连接的第二圆
环,所述第二圆环环绕所述锁紧块,且所述第二圆环内侧配合所述锲形槽设置有凸起;所述第二圆环外侧设置有拨杆,所述导向筒设置有通孔,所述拨杆穿过所述通孔且于所述通孔中转动;所述锁紧块环绕分布于所述穿刺针推进机构外侧。
14.所述拨杆连接有气动驱动设备或者电磁驱动设备。
15.所述穿刺针推进机构固定连接有铰接轴,所述铰接轴与所述连接耳的通孔间隙小于设定数值;所述铰接轴外端设置有限位,所述限位与所述连接耳的侧面间隙小于设定数值。
16.优选地,所述第一电机与第二电机为数控伺服机,所述第一电机与第二电机信号连接有数控设备。
17.另一优选,所述第一导杆与第二导杆设置有刻度;所述基板设置有观察所述第一导杆刻度的摄像头,所述第一升降座设置有观察第二导杆刻度的摄像头,所述摄像头信号连接有人机操控设备。
18.使用时,首先用c形臂x光机找到病灶的位置,确定病灶穿刺点的在本技术坐标系里的三维坐标,并测量到入针点在本技术坐标系里的三维坐标。
19.之后,驱动第一电机和第二电机,使本技术的两个xz平面点定位机构的两个第二丝杆轴线与克氏针轴线的交点均位于入针点和穿刺点的连线上,也即是让克氏针的轴线与该连线重合。
20.锁紧结构锁紧导向筒与穿刺针推进机构,启动穿刺针推进机构使克氏针进入人体,入深数据也以三维坐标计算得出。至于对穿刺针推进机构的伸缩操作控制,或者用电动推杆原理,或者用其它原理,均有现有技术。
21.本方案的有益效果可根据对上述方案的叙述得知,结构简单,设计合理,避免了使用体积较小的角度测量器来定位,从而能减少杠杆式放大误差的几率;同时,导杆对称分布于丝杆两侧的结构,抗挠强度好,在入针时,能避免克氏针因受力偏转角度超出要求偏差,从而能使克氏针准确到达设定穿刺点。而且即使在x光的引导下进行穿刺,也不需要工作人员在现场,使工作人员得到合理的保护。本方案主要的发明动机,是如何保证穿刺入针的方向准确,因而比较多考虑抗挠设计,还要考虑各零部件连接处的间隙对于误差的影响,主要是在连接耳与穿刺针推进机构铰接处不能有明显晃动,以及连接块与第二导杆连接处的角度偏转不能大于要求,轴承的配合方式就是为了避免有大于要求的偏转。导向筒设置锁紧结构,也是为了抗挠设计。
附图说明
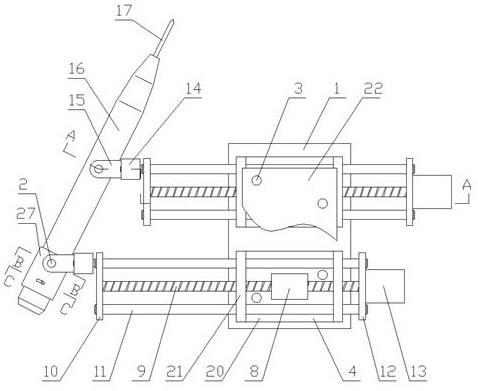
22.图1为本发明实施例一的结构示意图;图2为图1的a—a剖面图;图3为图2的i位置放大图;图4为图1的b—b剖面图;图5为图1的c—c剖面图;图中,1、基板;2、限位;3、第一导杆;4、第一升降座;5、第一丝杆;6、第一丝杆座;7、第一电机;8、第二丝杆座;9、第二丝杆;10、第一横移座;11、第二导杆;12、第二横移座;13、
第二电机;14、连接块;15、连接耳;16、穿刺针推进机构;17、克氏针;18、第三导杆;19、第二升降座;20、第一升降板;21、翼板;22、顶板;23、轴承;24、第一挡圈;25、第二挡圈;26、铰接轴;27、导向筒;28、第一圆环;29、锁紧块;30、第二圆环;31、凸起;32、拨杆;33、通孔。
具体实施方式
23.为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
24.实施例一如图1-5所示,本实施例是一种脊柱微创穿刺定位装置,包括基板1,基板1设置于手术床侧,基板1上表面作为测量的z向基准面也即是xy平面,基板1前侧设置有y向基准线,基板1的左侧或右侧设置有x向基准线;基板1设置有xz平面点定位机构,xz平面点定位机构包括于基板1上表面固定设置的第一导杆3,第一导杆3垂直于xy平面,第一导杆3滑动连接有第一升降座4,第一升降座4下侧活动连接有第一丝杆5,第一丝杆5活动连接有第一丝杆座6,第一丝杆座6固定设置于基板1,第一丝杆5穿过基板1传动连接有第一电机7;第一升降座4固定连接有第二丝杆座8,第二丝杆座8活动连接有第二丝杆9,第二丝杆9平行于x向基准线,第二丝杆9一端活动连接有第一横移座10,第一横移座10固定连接有第二导杆11,第二导杆11滑动连接第一升降座4,第二导杆11穿过第一升降座4固定连接有第二横移座12,第二横移座12固定连接有第二电机13,第二电机13传动连接第二丝杆9;第二导杆11穿过第一横移座10且穿过第一横移座10的端部绕其轴心转动连接有连接块14,连接块14设置有连接耳15;基板1并列设置有两套xz平面点定位机构,其中一套的连接耳15铰接有穿刺针推进机构16,另一套的连接耳15铰接有导向筒27,导向筒27滑动连接穿刺针推进机构16;穿刺针推进机构16端部设置有克氏针17,克氏针17轴线与第二丝杆9轴线位于同一平面。
25.基板1下表面固定设置有第三导杆18,第三导杆18平行于第一导杆3,第三导杆18滑动连接有第二升降座19,第二升降座19固定连接第一电机7。
26.基板1下表面至少设置有两个第三导杆18,第三导杆18位于以第一丝杆5为轴心的同一个圆柱上,且第三导杆18之间的相互间距相同。
27.第一升降座4包括第一升降板20,第一升降板20两端设置有竖立的翼板21,第二导杆11与两端的翼板21均滑动连接;第二丝杆9穿过翼板21,具体为翼板21设置有使第二丝杆9穿过的通孔,通孔与第二丝杆9同心且通孔的直径大于第二丝杆9;第二丝杆9两侧均设置有第二导杆11;第二丝杆座8与第一升降板20固定连接。
28.第一丝杆5两侧均设置有第一导杆3,其中一个第一导杆3穿过第二丝杆9与其左侧相邻的第二导杆11之间,另一个穿过第二丝杆9与其右侧相邻的第二导杆11之间;两套xz平面点定位机构设置于基板1上的四个第一导杆3在xy平面的投影的连线构成梯形,且梯形的底边和顶边平行于y向基准线;梯形的底边相对顶边靠近穿刺针推进机构16;
第一导杆3上端连接有顶板22;第一丝杆5和第二丝杆9均设置有制动器。
29.每套xz平面点定位机构的第二导杆11其中的一个穿过第一横移座10,该第二导杆11穿过第一横移座10的端部固定连接有两个轴承23,轴承23为圆锥转子轴承或角接触球轴承,且两个轴承23的大圈的受力侧面均背离另一个轴承;轴承23外侧连接有连接块14,连接块14包括圆筒,圆筒与轴承23之间设置有防止轴承23向其大圈受力侧面方向移动的第一挡圈24;第二导杆11设置有防止轴承23向其小圈受力侧面方向移动的第二挡圈25。
30.导向筒27与穿刺针推进机构16之间设置有锁紧结构,锁紧结构包括设置于导向筒27内侧且与导向筒27固定连接的第一圆环28,第一圆环28侧面设置有锁紧块29,锁紧块29设置有锲形槽;锁紧结构还包括设置于导向筒27内侧且与导向筒27滑动连接的第二圆环30,第二圆环30环绕锁紧块29,且第二圆环30内侧配合锲形槽设置有凸起31;第二圆环30外侧设置有拨杆32,导向筒27设置有通孔33,拨杆32穿过通孔33且于通孔33中转动;锁紧块29环绕分布于穿刺针推进机构16外侧。
31.穿刺针推进机构16固定连接有铰接轴26,铰接轴26与连接耳15的通孔间隙小于设定数值;铰接轴26外端设置有限位27,限位27与连接耳15的侧面间隙小于设定数值。
32.第一电机7与第二电机13为数控伺服机,第一电机7与第二电机13信号连接有数控设备。
33.使用时,首先用c形臂x光机找到病灶的位置,确定病灶穿刺点的在本技术坐标系里的三维坐标,并测量到入针点在本技术坐标系里的三维坐标。
34.之后,驱动第一电机7和第二电机13,使本技术的两个xz平面点定位机构的两个第二丝杆9轴线与克氏针17轴线的交点均位于入针点和穿刺点的连线上,也即是让克氏针17的轴线与该连线重合。启动穿刺针推进机构16使克氏针17进入人体,入深数据也以三维坐标计算得出。至于对穿刺针推进机构16的伸缩操作控制,或者用电动推杆原理,或者用其它原理,均有现有技术。
35.实施例二与实施例一不同之处在于,第一导杆3与第二导杆11设置有刻度;基板1设置有观察第一导杆3刻度的摄像头,第一升降座4设置有观察第二导杆11刻度的摄像头,摄像头信号连接有人机操控设备。
36.本发明未经描述的技术特征能够通过或采用现有技术实现,在此不再赘述,当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。