1.本发明涉及一种转运保存箱,尤其涉及一种急救科用人体器官转运保存箱。
背景技术:
2.在急救科室中,器官衰竭是非常严重的情况,这种情况下一般亟需移植与病人相匹配的器官,人体器官移植过程中,获取捐赠者的器官后,可能需要进行较长时间或较远距离的运输,才能移植到病人身上,器官运输过程中,温度的控制非常重要,恒定低温是保证器官活性非常重要的因素,目前,器官运输是在普通运输箱内放置干冰用于降温,然后将器官放置于箱体内,虽然箱体内的初始温度能够达到器官的保藏温度,但是在一定时间后,无法保证箱内的温度恒定在保藏温度的范围内,因此,难以保证运输过程中器官的活性。
3.传统的人体器官保存方式,是通过医护人员将人体器官放置在低温运输箱中,从而保证人体器官的活性,但低温运输箱没有固定功能,使得人体器官在运输的过程中受到震动而发生损坏,低温运输箱内部在长时间的低温下,容易凝结出冰块,需要医护人员手动进行清理,这样不仅增加了医护人员的工作任务,同时容易损坏低温运输箱内部。
4.为此,我们设计了一种实现自动固定人体器官和自动刮落冰块的急救科用人体器官转运保存箱。
技术实现要素:
5.为了克服传统人体器官保存箱无法自动固定人体器官和无法自动刮落冰块的缺点,本发明提供一种实现自动固定人体器官和自动刮落冰块的急救科用人体器官转运保存箱。
6.本发明是这样实现的,一种急救科用人体器官转运保存箱,包括:箱体、盖板、接触开关、开合机构、载物机构和制冷机构,箱体上侧设有开合机构,开合机构上设有盖板,盖板顶部设有接触开关,箱体内壁下部设有载物机构,箱体内壁设有制冷机构。
7.作为更进一步的优选方案,开合机构包括:盖板顶部中间设有把手,箱体上部中间设有固定块,固定块中部转动式设有转轴,转轴与盖板连接,转轴上两侧均绕有扭力弹簧,扭力弹簧两端分别与固定块和盖板连接,箱体上部设有多个铁块,盖板底部设有第一伸缩杆,第一伸缩杆底端设有电磁铁,第一伸缩杆上绕有第一弹簧,第一弹簧两端分别与盖板和电磁铁连接,电磁铁顶部设有距离传感器,箱体内壁上部设有光敏传感器。
8.作为更进一步的优选方案,载物机构包括:箱体内壁设有四根第一滑杆,四根第一滑杆之间滑动式连接有承料板,四根第一滑杆上均绕有第二弹簧,第二弹簧两端分别与第一滑杆和承料板连接,承料板顶部中间设有压力传感器。
9.作为更进一步的优选方案,制冷机构包括:箱体内壁两侧均设有安装板,两个安装板上两侧均设有储料罐,横向同侧的两个储料罐之间连接有管道,两根管道中部设有电磁阀,承料板底部两侧均设有出料管,出料管与电磁阀连接。
10.作为更进一步的优选方案,还包括有保护机构,保护机构包括:箱体内壁两侧均设
有两个第一滑槽,四个第一滑槽上均滑动式设有第二滑杆,纵向同侧的两根第二滑杆之间连接有伸缩块,两个伸缩块内部两侧均设有第二伸缩杆,纵向同侧的两根第二伸缩杆内侧均连接有挡板,四根第二伸缩杆上均绕有第三弹簧,第三弹簧两端分别与伸缩块和挡板连接。
11.作为更进一步的优选方案,还包括有抬起机构,抬起机构包括:箱体内壁中部安装有电动推杆,电动推杆伸缩杆顶端连接有推动架,推动架上部两侧均设有压杆,箱体内壁两侧均设有第三滑杆,第三滑杆与伸缩块滑动式连接,两根第三滑杆上均绕有第四弹簧,第四弹簧两端分别与箱体和伸缩块连接。
12.作为更进一步的优选方案,还包括有除霜机构,除霜机构包括:箱体上部两侧均设有安装架,两个安装架上部均安装有减速电机,两根减速电机输出轴上均设有绕线轮,箱体内壁两侧均设有第五滑杆,两根第五滑杆上均滑动式设有刮板,两个刮板底部均设有第四滑杆,两根第四滑杆之间连接有第五弹簧,刮板与绕线轮之间连接有拉绳。
13.作为更进一步的优选方案,还包括有控制箱,箱体中部安装有控制箱,控制箱内安装有蓄电池供电模块、控制模块和电源模块,开关电源为急救科用人体器官转运保存箱供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;接触开关、距离传感器、光敏传感器和压力传感器均与控制模块通过电性连接,电磁铁、电磁阀、电动推杆和减速电机均与控制模块通过继电器控制模块连接。
14.本发明提供了一种急救科用人体器官转运保存箱,具备以下有益效果:1、本发明通过承料板对人体器官进行承载,防止人体器官掉落在箱体中,实现承料板承载人体器官效果;2、当储料罐中的冷气通过管道、电磁阀和出料管散发在承料板上,从而对人体器官进行低温保存,实现低温保存人体器官效果;3、本发明通过挡板向内侧运动到与人体器官接触后,使得挡板对人体器官进行夹紧,从而防止人体器官在抖动过程中发生损坏,实现挡板固定人体器官效果;4、当拉绳带动刮板和第四滑杆向外侧运动,第五弹簧被拉伸,使得刮板对箱体内部的冰块进行刮落,防止冰块冻结盖板,实现刮板刮落冰块效果。
附图说明
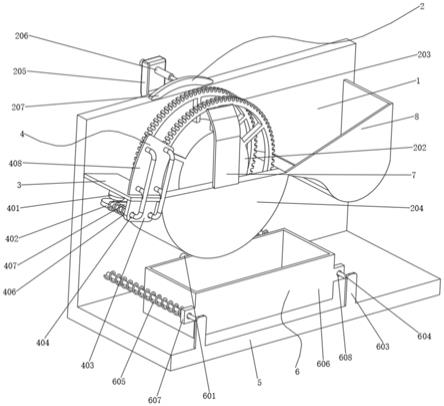
15.图1为本发明的第一视角立体结构示意图。
16.图2为本发明的第二视角立体结构示意图。
17.图3为本发明的部分立体结构示意图。
18.图4为本发明的开合机构第一部分立体结构示意图。
19.图5为本发明的开合机构第二部分立体结构示意图。
20.图6为本发明的开合机构第三部分立体结构示意图。
21.图7为本发明的载物机构剖面立体结构示意图。
22.图8为本发明的制冷机构第一视角立体结构示意图。
23.图9为本发明的制冷机构第二视角立体结构示意图。
24.图10为本发明的保护机构部分立体结构示意图。
25.图11为本发明的保护机构剖面立体结构示意图。
26.图12为本发明的抬起机构立体结构示意图。
27.图13为本发明的除霜机构第一部分剖面立体结构示意图。
28.图14为本发明的除霜机构第二部分剖面立体结构示意图。
29.图15为本发明的除霜机构第三部分剖面立体结构示意图。
30.图16为本发明的电路框图。
31.图17为本发明的电路原理图。
32.其中:1-箱体,2-盖板,3-控制箱,4-接触开关,5-开合机构,51-把手,52-固定块,53-转轴,54-扭力弹簧,55-第一伸缩杆,56-第一弹簧,57-电磁铁,58-铁块,59-距离传感器,510-光敏传感器,6-载物机构,61-第一滑杆,62-第二弹簧,63-承料板,64-压力传感器,7-制冷机构,71-储料罐,72-安装板,73-管道,74-电磁阀,75-出料管,8-保护机构,81-第一滑槽,82-第二滑杆,83-伸缩块,84-挡板,85-第二伸缩杆,86-第三弹簧,9-抬起机构,91-电动推杆,92-推动架,93-压杆,94-第三滑杆,95-第四弹簧,10-除霜机构,101-安装架,102-减速电机,103-绕线轮,104-拉绳,105-刮板,106-第四滑杆,107-第五弹簧,108-第五滑杆,109-第二滑槽。
具体实施方式
33.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
34.请参阅图1-图17,本发明提供一种技术方案:一种急救科用人体器官转运保存箱,包括有箱体1、盖板2、接触开关4、开合机构5、载物机构6和制冷机构7,箱体1上侧后部设有开合机构5,开合机构5上设有盖板2,箱体1内壁下部设有载物机构6,盖板2顶部前侧设有接触开关4,箱体1内壁设有制冷机构7。
35.开合机构5包括有把手51、固定块52、转轴53、扭力弹簧54、第一伸缩杆55、第一弹簧56、电磁铁57、铁块58、距离传感器59和光敏传感器510,盖板2顶部中间固定设有把手51,箱体1后侧上部中间焊接有固定块52,固定块52中部转动式设有转轴53,转轴53与盖板2连接,箱体1前侧上部中间设有多个铁块58,转轴53左右两侧均绕有扭力弹簧54,扭力弹簧54两端分别与固定块52和盖板2连接,盖板2底部前侧中间设有第一伸缩杆55,第一伸缩杆55底端设有电磁铁57,电磁铁57与铁块58配合,电磁铁57顶部设有距离传感器59,第一伸缩杆55上绕有第一弹簧56,第一弹簧56两端分别与盖板2和电磁铁57连接,箱体1内壁上部后侧设有光敏传感器510。
36.载物机构6包括有第一滑杆61、第二弹簧62、承料板63和压力传感器64,箱体1内壁固定设有四根第一滑杆61,四根第一滑杆61之间滑动式连接有承料板63,四根第一滑杆61上均绕有第二弹簧62,第二弹簧62两端分别与第一滑杆61和承料板63连接,承料板63顶部中间设有压力传感器64。
37.制冷机构7包括有储料罐71、安装板72、管道73、电磁阀74和出料管75,箱体1内壁左右两侧均焊接有安装板72,两个安装板72前后两侧均设有储料罐71,横向同侧的两个储料罐71上部内侧之间连接有管道73,承料板63底部前后两侧均设有出料管75,出料管75与
电磁阀74连接,两根管道73中部设有电磁阀74。
38.还包括有保护机构8,保护机构8包括有第一滑槽81、第二滑杆82、伸缩块83、挡板84、第二伸缩杆85和第三弹簧86,箱体1内壁左右两侧固定均设有两个第一滑槽81,四个第一滑槽81上均滑动式设有第二滑杆82,纵向同侧的两根第二滑杆82之间连接有伸缩块83,两个伸缩块83内部前后两侧均设有第二伸缩杆85,纵向同侧的两根第二伸缩杆85内侧均连接有挡板84,四根第二伸缩杆85上均绕有第三弹簧86,第三弹簧86两端分别与伸缩块83和挡板84连接。
39.还包括有抬起机构9,抬起机构9包括有电动推杆91、推动架92、压杆93、第三滑杆94和第四弹簧95,箱体1内壁中部通过螺栓固定安装有电动推杆91,电动推杆91伸缩杆顶端连接有推动架92,箱体1内壁中部左右两侧均设有第三滑杆94,第三滑杆94与伸缩块83滑动式连接,推动架92上部左右两侧均设有压杆93,压杆93与第二滑杆82配合,两根第三滑杆94上均绕有第四弹簧95,第四弹簧95两端分别与箱体1和伸缩块83连接。
40.还包括有除霜机构10,除霜机构10包括有安装架101、减速电机102、绕线轮103、拉绳104、刮板105、第四滑杆106、第五弹簧107和第五滑杆108,箱体1上部左右两侧均固定设有安装架101,两个安装架101上部均通过螺栓固定安装有减速电机102,两根减速电机102输出轴前侧均设有绕线轮103,箱体1内壁上部左右两侧均设有第五滑杆108,第五滑杆108上开有第二滑槽109,两根第五滑杆108上均滑动式设有刮板105,两个刮板105底部均设有第四滑杆106,两根第四滑杆106之间连接有第五弹簧107,刮板105与绕线轮103之间连接有拉绳104。
41.还包括有控制箱3,箱体1后侧中部通过螺栓固定安装有控制箱3,控制箱3内安装有蓄电池供电模块、控制模块和电源模块,开关电源为急救科用人体器官转运保存箱供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;接触开关4、距离传感器59、光敏传感器510和压力传感器64均与控制模块通过电性连接,电磁铁57、电磁阀74、电动推杆91和减速电机102均与控制模块通过继电器控制模块连接。
42.本发明的工作原理是,在急救科室里,当医护人员想要存放人体器官时,可使用这种急救科用人体器官转运保存箱,首先,医护人员按下电源总开关,将本设备上电,医护人员按下接触开关4后,使得控制模块控制开合机构5运转,开合机构5带动盖板2向后转动,从而打开箱体1内部,接着医护人员将人体器官放置在载物机构6中,当载物机构6产生的压力达到载物机构6的预设值时,使得控制模块控制制冷机构7运转,制冷机构7散发出的冷气对人体器官进行低温保存,人体器官放置完成后,医护人员操作开合机构5反向运转,开合机构5带动盖板2向前转动,从而关闭箱体1内部,当医护人员想要取出人体器官时,医护人员操作开合机构5运转,开合机构5带动盖板2向后转动,从而打开箱体1内部,接着医护人员将人体器官从载物机构6上取出,当载物机构6产生的压力小于载物机构6的预设值时,使得控制模块控制制冷机构7停止运转,从而停止释放出冷气,随后医护人员操作开合机构5反向运转,开合机构5带动盖板2向前转动,从而关闭箱体1内部,医护人员再次按下电源总开关,将本设备断电。
43.医护人员按下电源总开关,使得电磁铁57通电,电磁铁57对铁块58进行吸附,当医护人员想要对人体器官进行存放时,医护人员按下接触开关4,使得控制模块控制电磁铁57
断电,处于扭转形变状态的扭力弹簧54复位,从而带动转轴53、把手51、盖板2、第一伸缩杆55、第一弹簧56、电磁铁57和距离传感器59向后转动,从而打开箱体1内部,医护人员再将人体器官放置在载物机构6上,人体器官放置完成后,医护人员向前转动把手51,把手51带动盖板2、转轴53、第一伸缩杆55、第一弹簧56、电磁铁57和距离传感器59向前转动,扭力弹簧54扭转形变,当距离传感器59与铁块58之间的距离达到距离传感器59的预设值时,使得控制模块控制电磁铁57通电,电磁铁57产生的磁力对铁块58进行吸附,使得电磁铁57紧贴在铁块58上。
44.医护人员将人体器官放置在承料板63上后,受到人体器官自身重量的影响,从而带动承料板63和压力传感器64向下运动,第二弹簧62被压缩,承料板63对人体器官进行承载,防止人体器官掉落在箱体1中,当医护人员取出人体器官后,第二弹簧62复位,从而带动承料板63和压力传感器64向上运动到恢复原位。
45.医护人员将人体器官放置在承料板63上后,当承料板63产生的压力达到压力传感器64的预设值时,使得控制模块控制电磁阀74通电,从而打开出料管75通道,储料罐71中的冷气通过管道73、电磁阀74和出料管75散发在承料板63上,从而对人体器官进行低温保存,当承料板63产生的压力小于压力传感器64的预设值时,使得控制模块控制电磁阀74断电,从而关闭出料管75通道,使得冷气无法散发。
46.医护人员向外侧推动第二滑杆82,第二滑杆82带动伸缩块83、挡板84、第二伸缩杆85和第三弹簧86向外侧运动,第二滑杆82向外侧运动到极限后,医护人员控制第二滑杆82停留,接着医护人员再向外侧推动挡板84,挡板84带动第二伸缩杆85收缩,第三弹簧86被压缩,医护人员将人体器官放置在承料板63上后,医护人员松开挡板84,第三弹簧86复位,从而带动挡板84向内侧运动,挡板84带动第二伸缩杆85伸长,接着医护人员向内侧推动第二滑杆82,第二滑杆82带动伸缩块83、挡板84、第二伸缩杆85和第三弹簧86向内侧运动,挡板84向内侧运动到与人体器官接触后,使得挡板84对人体器官进行夹紧,从而防止人体器官在抖动过程中发生损坏。
47.当光敏传感器510感应到光线后,使得控制模块控制电动推杆91工作一秒钟后关闭,电动推杆91伸缩杆带动推动架92和压杆93向上运动,压杆93向上运动到与第二滑杆82接触后,从而带动第二滑杆82、伸缩块83、挡板84、第二伸缩杆85和第三弹簧86向外侧运动,第四弹簧95被压缩,使得压杆93解除挡板84对人体器官的夹紧状态,接着医护人员将人体器官取出,当光敏传感器510无法感应到光线后,使得控制模块控制电动推杆91工作一秒钟后关闭,电动推杆91伸缩杆带动推动架92和压杆93向下运动,压杆93向下运动脱离第二滑杆82后,第四弹簧95复位,从而带动第二滑杆82、伸缩块83、挡板84、第二伸缩杆85和第三弹簧86向内侧运动到恢复原位。
48.医护人员按下接触开关4后,使得控制模块控制减速电机102工作一秒钟后关闭,减速电机102输出轴带动绕线轮103转动,绕线轮103对拉绳104进行缠绕,绕线轮103拉动拉绳104,拉绳104带动刮板105和第四滑杆106向外侧运动,第五弹簧107被拉伸,使得刮板105对箱体1内部的冰块进行刮落,防止冰块冻结盖板2,当光敏传感器510无法感应到光线后,使得控制模块控制减速电机102工作一秒钟后关闭,减速电机102输出轴带动绕线轮103反向转动,使得绕线轮103对拉绳104解绕,第五弹簧107复位,从而带动刮板105和第四滑杆106向内侧运动到恢复原位。
49.尽管已经参照本公开的特定示例性实施例示出并描述了本公开,但是本领域技术人员应该理解,在不背离所附权利要求及其等同物限定的本公开的精神和范围的情况下,可以对本公开进行形式和细节上的多种改变。因此,本公开的范围不应该限于上述实施例,而是应该不仅由所附权利要求来进行确定,还由所附权利要求的等同物来进行限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。