1.本技术涉及汽车电子技术领域,特别涉及一种基于假设检验的雷达目标跟踪 优化方法。
背景技术:
2.目前车载角雷达对近距离目标的跟踪存在不稳定的问题,由于近距离目标检 测点跳动,尤其在侧面超车时,检测点在目标车头车尾跳动,使得前后两帧的点 迹跟踪不连续,速度不准,导致目标运动状态判断错误,形成虚假运动目标。
技术实现要素:
3.本技术为了解决现有技术中车载角雷达对近距离目标的跟踪存在不稳定的 问题,提供了一种基于假设检验的雷达目标跟踪优化方法。
4.一种基于假设检验的雷达目标跟踪优化方法,所述方法包括:
5.获取当前目标的连续多帧的检测点数据;
6.根据所述检测点数据,估计所述当前目标的运动方向;
7.计算多帧所述检测点数据在运动法向方向的均值数据和方差数据,并根据均 值数据和方差数据,统计所述当前目标在预设置信度的筛选范围值;
8.判断每帧所述检测点数据是否在所述筛选范围值内,若是则所述检测点数据 判定为真实检测点,否则判定为虚假检测点。
9.可选地,所述获取当前目标的连续多帧的检测点数据,包括:
10.实时获取当前目标连续10帧~30帧的检测点数据。
11.可选地,所述检测点数据包括距离、角度、速度、信号强度中一种或多种。
12.可选地,所述根据所述检测点数据,估计所述当前目标的运动方向,包括:
13.根据多帧所述检测点数据的位置变化,进行当前目标的运动方向估计。
14.可选地,所述根据多帧所述检测点数据的位置变化,进行当前目标的运动方 向估计,包括:
15.计算每两帧检测点的距离r,并将所述距离分解到雷达坐标系下的x=r*sin(θ) 和y=r*cos(θ)方向;
16.在x方向、y方向的位置变化分别为dx、dy,并根据所述dx、dy,分别统 计多帧检测点数据的x方向均值为u
dx
,y方向的均值为u
dy
,则运动方向 head=atan(u
dx
,u
dy
)。
17.可选地,所述计算多帧所述检测点数据在运动法向方向的均值数据和方差数 据,包括:
18.分别计算多帧所述检测点数据的距离数据均值ur、方差数据varr,速度的均 值数据uv、方差数据varv。
19.可选地,所述筛选范围值包括距离筛选范围值、速度筛选范围值,其中,所 述根据均值数据和方差数据,统计所述当前目标在预设置信度的筛选范围值,包 括:
20.根据预设置信度,查询正态分布函数表,获取调整参数n;
21.则所述距离筛选范围值为所述速度筛选范 围值为
22.可选地,判断每帧所述检测点数据是否在所述筛选范围值内,若是则所述检 测点数据为真实检测点,否则为虚假检测点;包括:
23.判断所述检测点数据的距离是否落入所述距离筛选范围值内;
24.若是则判断所述检测点数据的速度是否落入所述速度筛选范围值内,否则判 定为虚假检测点;
25.若是判定为真实检测点,否则判定为虚假检测点。
26.可选地,所述预设置信度为75%~95%。
27.可选地,在所述判断每帧所述检测点数据是否在所述筛选范围值内,若是则 所述检测点数据判定为真实检测点,否则判定为虚假检测点之后,还包括:
28.对所述真实检测点进行目标运动状态跟踪,并实时对所述真实检测点进行判 定,直至当前目标离开雷达探测区。
29.本技术的一种基于假设检验的雷达目标跟踪优化方法,其有益效果在于:本 申请通过多帧数据统计结果优化了目标跟踪点信息,使得目标运动轨迹平滑、速 度稳定,改善了车载雷达对近距离目标跟踪位置和速度不稳定导致盲区报警不连 续、误报、漏报等问题。
附图说明
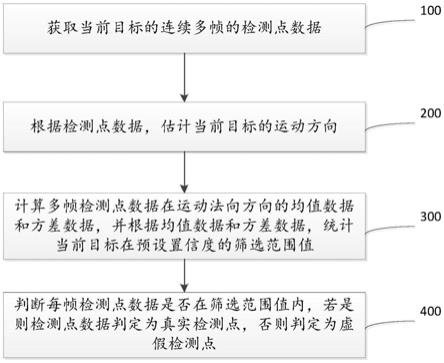
30.图1为本技术实施例的方法流程图1。
31.图2为本技术实施例的系统框图。
32.具体实施方式
33.下面结合附图对本技术的较佳实施例进行详细阐述,以使本技术的优点和特 征更易被本领域技术人员理解,从而对本技术的保护范围作出更为清楚的界定。
34.本技术实施例的附图中相同或相似的标号对应相同或相似的部件;在本技术 的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“顶”、
ꢀ“
底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置 关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元 件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的 用语仅用于示例性说明,不能理解为对本专利的限制。
35.此外,若有“第一”、“第二”等术语仅用于描述目的,主要是用于区分不 同的装置、元件或组成部分(具体的种类和构造可能相同也可能不同),并非用 于表明或暗示所指示装置、元件或组成部分的相对重要性和数量,而不能理解为 指示或者暗示相对重要性。
36.为了解决现有技术中存在开机过程中由于电源波动或其它干扰导致mcu读 取flash数据失败而无法正常开机的问题,本技术一种防止flash数据读取失败 的方法的具体实施方式如下:
37.实施例1,
38.在如图1-2所示的实施例中,本技术公开了一种基于假设检验的雷达目标跟 踪优化方法,本方法包括:
39.100,获取当前目标的连续多帧的检测点数据;在步骤100中,本技术通过 探测雷达实时检测当前目标的连续多帧的检测点数据,其中,获取当前目标的连 续多帧的检测点数据,包括:实时获取当前目标连续10帧~30帧的检测点数据。 检测点数据包括距离、角度、速度、信号强度中一种或多种。
40.200,根据检测点数据,估计当前目标的运动方向;在步骤200中,根据检 测点数据,估计当前目标的运动方向,包括:根据多帧检测点数据的位置变化, 进行当前目标的运动方向估计。根据多帧检测点数据的位置变化,进行当前目标 的运动方向估计,包括:计算每两帧检测点的距离r,并将距离分解到雷达坐标 系下的x=r*sin(θ)和y=r*cos(θ)方向;在x方向、y方向的位置变化分别为dx、 dy,并根据dx、dy,分别统计多帧检测点数据的x方向均值为u
dx
,y方向的均 值为u
dy
,则运动方向head=atan(u
dx
,u
dy
)。
41.300,计算多帧检测点数据在运动法向方向的均值数据和方差数据,并根据 均值数据和方差数据,统计当前目标在预设置信度的筛选范围值;在步骤300中, 计算多帧检测点数据在运动法向方向的均值数据和方差数据,包括:分别计算多 帧检测点数据的距离数据均值ur、方差数据varr,速度的均值数据uv、方差数据 varv。筛选范围值包括距离筛选范围值、速度筛选范围值,其中,根据均值数据 和方差数据,统计当前目标在预设置信度的筛选范围值,包括:根据预设置信度, 查询正态分布函数表,获取调整参数n;则距离筛选范围值为值为速度筛选范围值为
42.400,判断每帧检测点数据是否在筛选范围值内,若是则检测点数据判定为 真实检测点,否则判定为虚假检测点。在步骤400中,判断每帧检测点数据是否 在筛选范围值内,若是则检测点数据为真实检测点,否则为虚假检测点;包括: 判断检测点数据的距离是否落入距离筛选范围值内;若是则判断检测点数据的速 度是否落入速度筛选范围值内,否则判定为虚假检测点;若是判定为真实检测点, 否则判定为虚假检测点。
43.在本实施例中,本方法可应用于汽车电子产品中,汽车电子产品通过车载探 测雷达获取车辆周围的目标的多帧检测点数据,并对多帧检测点数据进行处理, 筛选出真实的检测点,过滤虚假的检测点。通过多帧数据统计结果优化了目标跟 踪点信息,使得目标运动轨迹平滑、速度稳定,改善了车载雷达对近距离目标跟 踪位置和速度不稳定导致盲区报警不连续、误报、漏报等问题。
44.在一些实施例中,获取当前目标的连续多帧的检测点数据,包括:实时获取 当前目标连续10帧~30帧的检测点数据。在本实施例中,本技术持续获取多帧检 测点数据,并实时替换在先帧率的检测点数据;通过不停探测对当前目标进行追 踪。在本实施例中,可以选取10帧、20帧、30帧的检测点数据进行统计计算。 检测点数据包括距离、角度、速度、信号强度中一种或多种。在本实施例中,检 测点数据包括距离、角度、速度、信号强度等。包括了当前目标的检测点的各种 参数。
45.在一些实施例中,根据检测点数据,估计当前目标的运动方向,包括:根据 多帧检测点数据的位置变化,进行当前目标的运动方向估计。根据多帧检测点数 据的位置变化,进行当前目标的运动方向估计,包括:计算每两帧检测点的距离 r,并将距离分解到雷达坐
标系下的x=r*sin(θ)和y=r*cos(θ)方向;在x方向、y 方向的位置变化分别为dx、dy,并根据dx、dy,分别统计多帧检测点数据的x 方向均值为u
dx
,y方向的均值为u
dy
,则运动方向head=atan(u
dx
,u
dy
)。在本实 施例中,本技术通过多帧检测点的位置变化,进行当前目标的运动方向估计,本 申请可以通过先计算每两帧的检测点数据相对于雷达位置的距离变化dr,再多个 相邻检测点数据的距离变化均值。其中,若dr接近于0,则认为当前目标为静止 状态。否则为运动状态。
46.在一些实施例中,计算多帧检测点数据在运动法向方向的均值数据和方差数 据,包括:分别计算多帧检测点数据的距离数据均值ur、方差数据varr,速度的 均值数据uv、方差数据varv。筛选范围值包括距离筛选范围值、速度筛选范围值, 其中,根据均值数据和方差数据,统计当前目标在预设置信度的筛选范围值,包 括:根据预设置信度,查询正态分布函数表,获取调整参数n;则距离筛选范围 值为速度筛选范围值为筛选范围值为在本实施例中,本技术进行计算前,先假设当前目标的检测点数据 在运动法向方向上满足正态分布,根据正态分布规律对多帧检测点数据的均值和 方差进行统计。其中,运动法向方向即垂直于速度方向。在实施例中,由于各检 测点符合正态分布,根据预设置信度,可通过正态分布的函数表,查找调整参数 值。再笨实施例中,本技术可以根据75%-95%的预设置信度对检测点数据进行筛 选。当预设置信度为95%时,调整参数n的取值为1.96。即距离筛选范围值为 速度筛选范围值为速度筛选范围值为
47.在一些实施例中,判断每帧检测点数据是否在筛选范围值内,若是则检测点 数据为真实检测点,否则为虚假检测点;包括:判断检测点数据的距离是否落入 距离筛选范围值内;若是则判断检测点数据的速度是否落入速度筛选范围值内, 否则判定为虚假检测点;若是判定为真实检测点,否则判定为虚假检测点。在本 实施例中,可以先判断检测点数据的距离是否落入距离筛选范围值内,再判断检 测点数据的速度是否落入速度筛选范围内;两点都满足的话,判定为真实检测点, 否则判定为虚假检测点。
48.在一些实施例中,在判断每帧检测点数据是否在筛选范围值内,若是则检测 点数据判定为真实检测点,否则判定为虚假检测点之后,还包括:对真实检测点 进行目标运动状态跟踪,并实时对真实检测点进行判定,直至当前目标离开雷达 探测区。在本实施例中,本技术确定当前目标的真实检测点后,实时对当前目标 的后续检测点数据进行获判断;以对当前目标进行追踪;直至当前目标离开雷达 探测区。对虚假检测点进行过滤。
49.实施例2,
50.在如图2所示的实施例中,本技术还提供一种基于假设检验的雷达目标跟踪 优化方法;具体实现方法如下:
51.步骤1,首先收集同一目标连续10~30帧的检测点信息,包括距离r、角度 θ、速度v、信号强度a等;
52.步骤2,根据n帧点的位置变化估计该目标的运动方向;
53.步骤3,假设同一目标上的检测点在其运动速度法向方向上满足正态分布, 统计这些点在该方向上位置、速度分布的均值和方差;
54.步骤4,取满足如75%~95%置信度的检测点为目标的真实检测点,其他为虚 假检测点或置信度较低的点,将置信度高的检测点作为真实目标跟踪点;
55.步骤5,利用上述筛选后的跟踪点进行目标运动状态跟踪;
56.步骤6,重复步骤1~步骤4过程,直至目标离开雷达探测区。
57.在上述实施例的一种具体实施方式中,若雷达检测到静止车辆a,收集该目 标车上的连续10帧的检测点dots(r,θ,v,amp),先过滤一些信噪比低于20db的 点,然后计算每两帧检测点相对于雷达的位置变化dr,统计均值,发现dr接近 于0,则认为该目标处于静止状态,并记录位置变化的均值ur和方差varr;同时 统计检测速度值的均值uv和方差varv;根据均值和方差筛选点迹置信度在95%范 围内的检测点,即位置在范围速度在范围 内的检测点;这些点即认为是静止车辆的 真实目标检测点,利用这些点的质心点进行目标跟踪,不在范围内的点即认为是 虚假检测点或检测不准确的点。
58.在上述实施例的另一实施例中,若雷达检测到运动车辆b,收集该目标车上 的连续10帧的检测点dots(r,θ,v,amp),先过滤一些信噪比低于20db的点,对 于运动目标,将r分解到雷达坐标系下的x=r*sin(θ)和y=r*cos(θ)两个方向,然 后分别计算每两帧点迹相对于雷达的位置变化:dx、dy,并计算均值u
dx
、u
dy
, 根据位置变化估算其运动方向head=atan(u
dx
,u
dy
)。
59.计算点到目标运动方向法线方向距离均值ur和方差varr,筛选距离满足范围内的检测点;其次认为一段时间内目标匀速 运动,统计其运动方向速度的uv和方差varv,筛选满足范围,筛选满足范围内的检测点;这些点即认为是静止车辆的真实目标检测 点,利用这些点的质心点进行目标跟踪,不在范围内的点即认为是虚假检测点或 检测不准确的点。
60.实施例3,
61.本技术还公开一种车载终端,车载终端与探测雷达连接,且车载终端运行有 执行上述实施例1或实施例2的一种基于假设检验的雷达目标跟踪优化方法的程 序。本技术通过多帧数据统计结果优化了目标跟踪点信息,使得目标运动轨迹平 滑、速度稳定,改善了车载雷达对近距离目标跟踪位置和速度不稳定导致盲区报 警不连续、误报、漏报等问题。
62.上面结合附图对本技术的实施方式作了详细说明,但是本技术并不限于上述 实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本技术 宗旨的前提下做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。