技术特征:
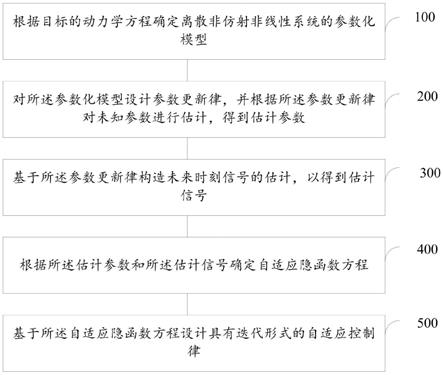
1.一种无人直升机偏航通道动力学的自适应跟踪控制方法,其特征在于,包括:根据目标的动力学方程确定离散非仿射非线性系统的参数化模型;对所述参数化模型设计参数更新律,并根据所述参数更新律对未知参数进行估计,得到估计参数;基于所述参数更新律构造未来时刻信号的估计,以得到估计信号;根据所述估计参数和所述估计信号确定自适应隐函数方程;基于所述自适应隐函数方程设计具有迭代形式的自适应控制律;所述具有迭代形式的自适应控制律的解为所述离散非仿射非线性系统的控制信号。2.根据权利要求1所述的无人直升机偏航通道动力学的自适应跟踪控制方法,其特征在于,所述对所述参数化模型设计参数更新律,并根据所述参数更新律对未知参数进行估计,得到估计参数,包括:令表示θ
*
的估计,且的估计,且其中,θ
*
为未知参数,和分别为所述离散非仿射非线性系统的输出信号和输入信号;f:为设定的lipschitz非线性可微映射;d为系统输入-输出时延且满足1≤d≤n;定义误差为∈(t)=θ
t
(t)φ
f
(t-1)-y(t);根据所述误差设计所述参数更新律为根据所述误差设计所述参数更新律为其中,γ=diag{γ1,...,γ
p
}为增益矩阵;g(θ(t),h(t))=[g1(θ1(t),h1(t)),...,g
p
(θ
p
(t),h
p
(t))]
t
为基于参数投影技术的修正项;γ
i
∈(0,2);存在已知的有界闭区间组满足且其中α0是未知正常数,x
n 1
是f的第n 1个变量;设计g
i
(θ
i
(t),h
i
(t))的形式为:其中,h
i
(t)为h(t)的第i个分量,且h(t)的形式为基于所述参数更新律确定θ(t i0)-θ(t)∈l2,其中i0为任
意正整数。3.根据权利要求2所述的无人直升机偏航通道动力学的自适应跟踪控制方法,其特征在于,所述基于所述参数更新律构造未来时刻信号的估计,以得到估计信号,包括:基于所述动力学方程和所述参数更新律设计具体为:具体为:其中,为输出信号y(t 1)的估计,为输出信号y(t j)的估计;为φ
f
的估计;其中,基于得到的作为估计信号;所述估计信号在当前时刻是已知的,且满足其中,μ(t)∈l2,μ(t)为通用的衰减信号界。4.根据权利要求3所述的无人直升机偏航通道动力学的自适应跟踪控制方法,其特征在于,所述根据所述估计参数和所述估计信号确定自适应隐函数方程,包括:基于未知参数的估计和未来输出信号的估计构造与所述动力学方程结构一致的自适应隐函数方程;所述自适应隐函数方程为应隐函数方程;所述自适应隐函数方程为其中,y
*
(t d)=r(t),r(t)为当前时刻已知的参考输入信号;在每个采样时刻t,所述自适应隐函数方程关于u(t)有唯一解,记为且满足且满足其中,x
n 1
为φ
f
(t j)的第n 1个变量。5.根据权利要求4所述的无人直升机偏航通道动力学的自适应跟踪控制方法,其特征在于,所述基于所述自适应隐函数方程设计具有迭代形式的自适应控制律,包括:基于所述自适应隐函数方程在每个采样时刻t,设计迭代形式的自适应控制律为其中u0(t)取为t-1时刻的控制信号值,γ(t)是一个给定的依赖时间t的时变参数,且满足值,γ(t)是一个给定的依赖时间t的时变参数,且满足6.一种无人直升机偏航通道动力学的自适应跟踪控制系统,其特征在于,包括:模型构建单元,用于根据目标的动力学方程确定离散非仿射非线性系统的参数化模型;参数估计单元,用于对所述参数化模型设计参数更新律,并根据所述参数更新律对未知参数进行估计,得到估计参数;
信号估计单元,用于基于所述参数更新律构造未来时刻信号的估计,以得到估计信号;方程确定单元,用于根据所述估计参数和所述估计信号确定自适应隐函数方程;控制律构建单元,用于基于所述自适应隐函数方程设计具有迭代形式的自适应控制律;所述具有迭代形式的自适应控制律的解为所述离散非仿射非线性系统的控制信号。
技术总结
本发明涉及一种无人直升机偏航通道动力学的自适应跟踪控制方法及系统,所述方法包括:根据目标的动力学方程确定离散非仿射非线性系统的参数化模型;对所述参数化模型设计参数更新律,并根据所述参数更新律对未知参数进行估计,得到估计参数;基于所述参数更新律构造未来时刻信号的估计,以得到估计信号;根据所述估计参数和所述估计信号确定自适应隐函数方程;基于所述自适应隐函数方程设计具有迭代形式的自适应控制律;所述具有迭代形式的自适应控制律的解为所述离散非仿射非线性系统的控制信号。本发明构造了解析的自适应控制律实现了自适应输出跟踪性能,保证被控系统的闭环信号有界和实用输出跟踪。环信号有界和实用输出跟踪。环信号有界和实用输出跟踪。
技术研发人员:张纪峰 张言军 孙健 赵延龙
受保护的技术使用者:北京理工大学
技术研发日:2022.02.23
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。