1.本发明涉及气体传感器。
背景技术:
2.构建基于新原理和新材料的智能感知系统是传感领域的研发趋势。传统的基于气敏材料的传感器具有室温恢复能力和选择 性等还达不到应用要求的问题。而在阵列传感器中,普遍采用温度调制技术或敏感元负载调控的方法,结合算法的概率统计模型来达到信息多样化的要求。但是温度组件和大量负载的引入不可避免地带来体积大、兼容性差、功耗高等问题。
技术实现要素:
3.本发明的目的是提供一种阵列式气体传感器,其特征在于,其制备方法包括以下步骤:1〕在传感器衬底上制备出n列
×
m行,共nm个磁控溅射孔位和电极;制备时,需要采用掩模版a覆盖于衬底上,进行磁控溅射孔位的制备;其中掩模版a具有n列
×
m行,共nm个矩形阵列状排列的通孔;每个磁控溅射孔位均连接两个电极; n和m为大于2的自然数;2〕采用掩模版b1~掩模版bn依次覆盖于步骤1〕处理过的传感器衬底上,并依次采用n种溅射材料,通过磁控溅射将n种不同溅射材料分别生长到n列磁控溅射孔位上;其中,掩模版b1具有与第1列磁控溅射孔位对应的通孔、掩模版b2具有与第2列磁控溅射孔位对应的通孔、
……
掩模版bn具有与第n列磁控溅射孔位对应的通孔;3〕采用掩模版c1~掩模版cm-1依次覆盖于步骤2〕处理过的传感器衬底上,并依次采用m-1种溅射材料,通过磁控溅射分别生长到磁控溅射孔位上; m-1种溅射材料,依次被编号为i,i=1、2
……
m-1;这m-1种溅射材料与步骤2〕中所述n种溅射材料均不同;其中,第i种溅射材料生长到第i行的n/2个磁控溅射孔位上和第i 1行的n/2个磁控溅射孔位上,n为奇数时,n/2舍位取整;其中,掩模版c1具有与第1行和第2行磁控溅射孔位对应的n/2个通孔、掩模版c2具有与第2行和第3行磁控溅射孔位对应的n/2个通孔
……
掩模版c1具有与第1行磁控溅射孔位对应的n/2个通孔。
4.进一步,磁控溅射材料选自mos2、zno、wo3、tio2、sno2、c、hfo2、ta2o5、ga2o3。
5.进一步,步骤2〕和/或步骤3〕中,在完成材料溅射后,对溅射材料进行参杂;参杂选用的金属为cu、al、w、pt、cr、mn、ag、ce、sb。
6.进一步,步骤3〕中,第i行的n/2个磁控溅射孔位上和第i 1行的n/2个磁控溅射孔位错位分布。
7.本发明还公开一种基于上述传感器的智能气体检测方法,其特征在于:将所述传感器的电极接入测量电路,采集传感器阵列中,n
×
m个阵列单元对不同气体的动态实时响应曲线;对响应曲线提取稳态响应特征和动态响应特征,通过机器学习,建立和训练用于识别气体种类的模型;在利用所述传感器检测待测气体时,通过测量电路获取测量参数,并输
入所述用于识别气体种类的模型,实现待测气体种类的识别。即通过对信号进行特征提取和分析,以及模式识别算法,得到传感器特性参数与被测气体间的内在联系机制,实现选择性和探测精度等气敏性能的提升。
附图说明
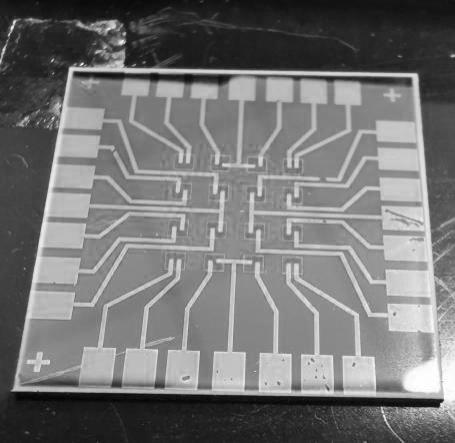
8.图1为实施例3的传感器实物图;图2为阵列单元示意图;图3为实施例3步骤1的掩模版a示意图;图4为实施例3步骤2的掩模版b1~b4示意图;图5为实施例3步骤3的掩模版c1~c3示意图;图6为实施例4对应的实物图。
具体实施方式
9.下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
10.实施例1:本实施例提供一种阵列式气体传感器,其特征在于,其制备方法包括以下步骤:1〕在传感器衬底上制备出n列
×
m行,共nm个磁控溅射孔位和电极;进而在后续步骤中,使得每一个磁控溅射孔位形成如图2所示的阵列单元。
11.本步骤中,制备时,需要采用掩模版a覆盖于衬底上,进行磁控溅射孔位的制备;其中掩模版a具有n列
×
m行,共nm个矩形阵列状排列的通孔;每个磁控溅射孔位中的阵列单元均连接两个电极; n和m为大于2的自然数;如图1所示,在一个实施例中,电极为au电极。每一个阵列单元均具有两条电极。每一个电极连接器件边缘处的触点。
12.在一个实施例中,衬底材料为硅。需要在硅材料上方形成氧化层后,再进行磁控溅射孔位和电极的制备。
13.2〕采用掩模版b1~掩模版bn依次覆盖于步骤1〕处理过的传感器衬底上,并依次采用n种溅射材料,通过磁控溅射将n种不同溅射材料分别生长到n列磁控溅射孔位上;其中,掩模版b1具有与第1列磁控溅射孔位对应的通孔、掩模版b2具有与第2列磁控溅射孔位对应的通孔、
……
掩模版bn具有与第n列磁控溅射孔位对应的通孔;3〕采用掩模版c1~掩模版cm-1依次覆盖于步骤2〕处理过的传感器衬底上,并依次采用m-1种溅射材料,通过磁控溅射分别生长到磁控溅射孔位上; m-1种溅射材料,依次被编号为i,i=1、2
……
m-1;这m-1种溅射材料与步骤2〕中所述n种溅射材料均不同;其中,第i种溅射材料生长到第i行的n/2个磁控溅射孔位上和第i 1行的n/2个磁控溅射孔位上,n为奇数时,n/2舍位取整;其中,掩模版c1具有与第1行和第2行磁控溅射孔位对应的n/2个通孔、掩模版c2具有与第2行和第3行磁控溅射孔位对应的n/2个通孔
……
掩模版c1具有与第1行磁控溅射孔位对应的n/2个通孔。
14.步骤2和3中,磁控溅射材料选自mos2、zno、wo3、tio2、sno2、c,hfo2、ta2o5、ga2o3。作为优选地,步骤3〕中,第i行的n/2个磁控溅射孔位上和第i 1行的n/2个磁控溅射孔位错位
分布。
15.实施例2:本实施例提供一种类似于实施例1的阵列式气体传感器,进一步,步骤2〕和/或步骤3〕中,在全部或部分磁控溅射孔位完成材料溅射后,需要对溅射材料进行参杂;参杂选用的金属为cu、al、w、pt、cr、mn、ag、ce、sb。
16.实施例3:本实施例提供一种如图1所示的阵列式气体传感器,其特征在于,其制备方法包括以下步骤:1〕选用硅材料衬底,在硅材料上方形成氧化层后,在传感器衬底上制备出4列
×
4行,共16个磁控溅射孔位。制备磁控溅射孔位时,需要用到如图3所示的掩模版a。如图2所示,每一个磁控溅射孔位连接两个au电极,每一个电极均连接到器件边缘处的触点。
17.2〕采用如图4所示的掩模版b1~b4依次覆盖于步骤1〕处理过的传感器衬底上,并依次采用4种溅射材料,通过磁控溅射将4种不同溅射材料分别生长到4列磁控溅射孔位上。
18.具体地:掩模版b1覆盖于处理过的传感器衬底上,以ar作为溅射气体,溅射时溅射功率保持在100w,衬底温度300℃,通过磁控溅射将溅射材料mos2生长到第1列磁控溅射孔位对应的阵列单元中。
19.掩模版b2覆盖于步骤1〕处理过的传感器衬底上,以ar作为溅射气体,溅射时溅射功率保持在100w,衬底温度300℃,通过磁控溅射将溅射材料zno生长到第2列磁控溅射孔位对应的阵列单元中。
20.掩模版b3覆盖于处理过的传感器衬底上,以ar作为溅射气体,溅射时溅射功率保持在100w,衬底温度300℃,通过磁控溅射将溅射材料wo3生长到第3列磁控溅射孔位对应的阵列单元中。
21.掩模版b4覆盖于处理过的传感器衬底上,以ar作为溅射气体,溅射时溅射功率保持在100w,衬底温度300℃,通过磁控溅射将溅射材料sno2生长到第4列磁控溅射孔位对应的阵列单元中。
22.3〕采用如图5所示的掩模版c1~3依次覆盖于步骤2〕处理过的传感器衬底上,并依次采用3种溅射材料,通过磁控溅射分别生长到磁控溅射孔位上;具体地:掩模版c1覆盖于处理过的传感器衬底上,以ar作为溅射气体,溅射时溅射功率保持在100w,衬底温度300℃,通过磁控溅射将溅射材料hfo2生长到(行,列)编号为(1,1)、(1,3)、(2,2)、(2,4) 的磁控溅射孔位对应的阵列单元中。
23.掩模版c2覆盖于处理过的传感器衬底上,以ar作为溅射气体,溅射时溅射功率保持在100w,衬底温度300℃,通过磁控溅射将溅射材料ta2o5生长到(行,列)编号为(1,3)、(2,4)、(3,3)、(4,4)的磁控溅射孔位对应的阵列单元中。
24.掩模版c3覆盖于处理过的传感器衬底上,以ar作为溅射气体,溅射时溅射功率保持在100w,衬底温度300℃,通过磁控溅射将溅射材料ga2o3生长到(行,列)编号为(1,4)、(2,3)、(3,4)、(4,3)的磁控溅射孔位对应的阵列单元中。
25.实施例4:
本实施例将实施例3所述传感器的电极接入测量电路(如图6的照片所示),通过实验,采集传感器阵列中,16个阵列单元对不同气体的动态实时响应曲线;对采集到的数据提取稳态响应特征和动态响应特征,通过机器学习,建立和训练用于识别气体种类的模型;在利用所述传感器检测待测气体时,通过测量电路获取测量参数,并输入所述用于识别气体种类的模型,实现待测气体种类的识别。
26.实施例5:本实施例主要技术方案同实施例4,进一步,对传感器阵列响应曲线提取稳态响应特征和动态响应特征,包括:基于原始响应曲线的特征(峰值、面积、斜率等)、基于曲线拟合参数的特征、基于变换域的特征。由各特征组成特征矩阵,并通过特征评价算法,降低特征冗余度、选出最优特征子集。把超限学习机(elm)神经网络作为分类器,对最优特征子集进行定量/定性识别,并利用量子粒子群优化算法优化分类器参数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。