1.本实用新型涉及一种清洁装置及基站,属于自动清洁设备领域。
背景技术:
2.目前市场上,通过在清洁机器人的底部设置一拖布,当拖地时间较久后,水和脏污附着在拖布上面,在之后的地面清理过程中还可能对地面造成二次污染,并且拖布需要拆卸下来人工清洗,费时费力,不卫生且影响用户体验。此外,现有的基站能够实现对拖布进行自动清洁,但是存在结构布局不合理、噪音大等问题。
3.有鉴于此,确有必要对现有的清洁装置及基站提出改进,以解决上述问题。
技术实现要素:
4.本实用新型的目的在于提供一种清洁装置及基站,能够自动对拖布进行清洁。
5.为实现上述目的,本实用新型提供了一种清洁装置,用于对清洁机器人进行清洁,包括清洁组件;驱动组件,包括偏心轮和传动件,所述传动件的延伸方向平行于所述偏心轮的转动平面,所述传动件用于连接所述偏心轮和所述清洁组件,所述传动件与所述偏心轮的非圆心位置转动连接,并在所述偏心轮的转动下带动所述清洁组件实现水平往复运动。
6.作为本实用新型的进一步改进,所述驱动组件还包括用于驱动所述偏心轮绕其圆心转动的电机,所述传动件呈条状且与所述偏心轮的圆周转动连接。
7.作为本实用新型的进一步改进,所述清洁组件包括清洁头和连接座,所述传动件与所述连接座转动连接。
8.作为本实用新型的进一步改进,所述清洁装置还包括导向组件,所述导向组件包括水平设置的导轨和滑轮,所述导轨固定在所述清洁装置上,所述滑轮和所述清洁头分设在所述连接座的两侧,所述连接座通过所述滑轮与所述导轨滑动连接。
9.作为本实用新型的进一步改进,所述导轨上设有凸条,所述滑轮的周向侧面设有与所述凸条相配合的凹槽,使得所述滑轮可沿所述导轨滚动。
10.作为本实用新型的进一步改进,所述导轨的上下两侧均设有所述滑轮,且所述导轨的上下两侧各设有两个滑轮。
11.作为本实用新型的进一步改进,所述驱动组件设置在所述导轨延伸方向的一侧,所述导轨延伸方向的另一侧还设有用于对所述清洁头进行干燥的鼓风机。
12.作为本实用新型的进一步改进,所述驱动组件和所述清洁组件之间设有防水挡板,所述防水挡板上开设有与所述鼓风机连通的出风口。
13.作为本实用新型的进一步改进,所述清洁装置还包括喷水组件,所述喷水组件与所述清洁头相连并跟随所述清洁组件同步运动。
14.为实现上述目的,本实用新型还提供了一种基站,包括如上所述的清洁装置。
15.本实用新型的有益效果是:本实用新型所提供的基站不仅能够为清洁机器人进行充电,还可以实现自动清洁拖布,基站中的驱动组件通过设置在基站的侧后方,使得整个基
站内部的结构布局紧凑,最大化利用空间,同时可以提高结构运行的稳定性,降低故障率和噪音。
附图说明
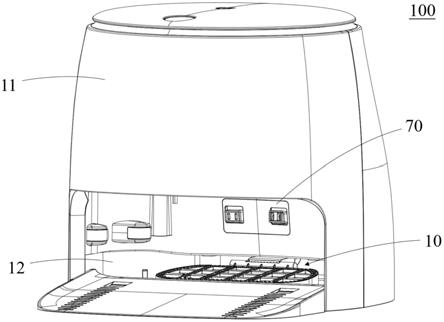
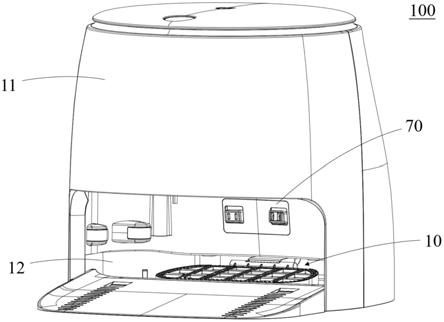
16.图1是本实用新型的基站的结构示意图。
17.图2是本实用新型的基站背面的结构示意图。
18.图3是本实用新型的清洁装置的结构示意图。
19.图4是本实用新型的清洁装置的另一视角的结构示意图。
20.图5是本实用新型的基站中鼓风机的结构示意图。
21.图6是本实用新型的充电装置的结构示意图。
22.图7是本实用新型的充电装置的分解结构示意图。
23.图8是图7中a处的结构放大图。
24.图9是本实用新型的充电装置的分解结构示意图。
具体实施方式
25.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
26.在此,需要说明的是,为了避免因不必要的细节而模糊了本实用新型,在附图中仅仅示出了与本实用新型的方案密切相关的结构和/或处理步骤,而省略了与本实用新型关系不大的其他细节。
27.另外,还需要说明的是,术语“包括”、“包含”或者任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
28.如图1至图9所示,本实用新型揭示了一种清洁机器人的基站100,所述基站100用于对清洁机器人进行清洁以及充电,所述基站100包括清洁装置10和充电装置70。在本实用新型中,所述清洁机器人配置有拖地模块(未图示),该拖地模块上安装有拖布,其中所述清洁装置10用于清洗该拖布,所述充电装置70用于对所述清洁机器人进行充电。为了描述清楚,以下说明书部分将对所述基站100的具体结构进行详细说明。
29.如图1至图3所示,所述基站100具有一呈台柱状的外壳体11,所述基站100的下端开设有一清洁腔12,所述清洁机器人可停留在所述清洁腔12内进行充电,通过所述清洁装置10进行清洁。所述清洁装置10设置在所述清洁腔12和所述外壳体11之间,所述清洁装置10包括清洁组件20、喷水组件30、导向组件40和驱动组件50,所述喷水组件30设置在所述清洁组件20中,所述基站100中设有清水箱和污水箱,所述清水箱和所述污水箱设置在所述基站100的外壳体11的上端,所述清水箱与所述喷水组件30相连,所述喷水组件30用于对拖布进行加湿,以便于清洁组件20进行清洁。所述清洁组件20在所述驱动组件50的驱动下沿所述导向组件40进行往复运动,以实现对拖布的清洁,同时,清洁后的污水汇流在所述清洁腔12的底部,最后通过污水泵收集至污水箱。
30.具体地,所述清洁组件20包括清洁头21和连接座22,当所述清洁机器人停留在所
述清洁腔12内时,所述清洁头21设置在所述清洁机器人的下方,且正对拖地模块的拖布,所述清洁头21为塑料件并通过所述清洁组件20的往复运动,实现对拖布的摩擦刮洗,从而达到清洁的效果。所述连接座22用于连接导向组件40,所述清洁头21可相对于所述连接座22转动,所述清洁头21和所述连接座22包括但不限于通过合页或齿轮卡接等形式,以便将所述清洁头21抬起,从而对所述清洁腔12内进行手动清理。
31.如图3所示,所述喷水组件30设置在所述清洁组件20中,具体包括清水泵(未图示)和清水管31,所述清洁头21中设有与所述清水管31相连的出水孔,清水箱中的清水在清水泵的作用下沿清水管31从出水孔中喷出,包括但不限于直喷或喷雾等形式。进一步地,所述清水泵可设置在所述清水箱中或所述清水箱的背部,所述清水管31可与所述连接座22固定设置并跟随所述连接座22沿所述导向组件40同步运动,如此设置,使得所述喷水组件30能够对所述清洁头21实时清洁的部位进行喷洗,以节约清水的用量。
32.如图3和图4所示,所述导向组件40设置在所述基站100的后端,所述导向组件40包括水平设置的导轨41和滑轮42,所述导轨41固定设置在所述外壳体11上,所述导轨41上设有可沿所述导轨41滚动的滑轮42,所述导轨41上设有凸条,所述滑轮42的周向侧面设有与所述凸条相配合的凹槽,使得所述滑轮42可沿所述导轨41滚动。所述滑轮42固定设置在所述连接座22的背面,所述滑轮42和所述清洁头21分设在所述连接座22的两侧,以使所述连接座22通过所述滑轮42与所述导轨41滑动连接,所述连接座22可相对于所述导轨41进行滑动。进一步地,所述导轨41的上下两侧均设有所述滑轮42,且所述导轨41的上侧和下侧均优选设有两个滑轮42,如此以防止所述连接座22与所述导轨41脱轨分离,同时增强连接的稳固性,同时滑轨可有效降低运行噪音。在本实用新型的另一实施例中,所述导轨41的两侧可设有防止所述连接座22脱出的限位件43,可以理解的是,所述限位件43为可拆卸设置,以便于对所述连接座22进行安装拆卸。
33.所述驱动组件50设置在所述基站100的后端,所述驱动组件50包括偏心轮51、传动件52和电机53,所述偏心轮51分别连接所述传动件52和所述电机53,所述传动件52优选呈条状。所述电机53用于驱动所述偏心轮51转动并带动所述传动件52运动。具体地,所述电机53的电机53轴与所述偏心轮51的圆心相连,以驱动所述偏心轮51绕其圆心转动,所述传动件52与所述偏心轮51的非圆心位置转动连接,优选为所述偏心轮51的圆周,即,该非圆心位置距圆心的距离为该偏心轮51的半径。进一步地,所述传动件52平行于所述偏心轮51设置,即所述传动件52的延伸方向平行于所述偏心轮51的转动平面,所述传动件52用于连接所述偏心轮51和所述清洁组件20,可以理解的是,所述传动件52与所述偏心轮51和所述连接座22均为转动连接,并在所述偏心轮51的转动下带动所述清洁组件20实现水平往复运动。
34.值得注意的是,所述驱动组件50设置在所述导轨41延伸方向的一侧,如此设置可最大化利用空间,同时,所述导轨41延伸方向的另一侧还设有用于对所述清洁头21进行干燥的鼓风机60。
35.如图5所示,进一步地,为防止所述清洁腔12内的水渍进入到所述基站100内部,所述驱动组件50和所述清洁组件20之间设有防水挡板61,具体地,所述防水挡板61水平设置且可分隔所述清洁头21和所述连接座22,即,所述清洁头21位于所述防水挡板61的下方,所述连接座22的主体位于所述防水挡板61的上方。所述防水挡板61上方还设有与所述鼓风机60联通的风道,所述风道在所述防水挡板61上开设有与所述清洁腔12导通的出风口62,以
使所述鼓风机60能够对所述清洁腔12进行干燥。可以理解的是,所述鼓风机60可以是抽气也可以是吸气,具体可根据需要进行设置,在此不做任何限制。
36.如图6至图9所示,所述驱动组件50和所述鼓风机60之间还设有所述充电装置70,所述充电装置70包括一呈盒状的主壳体且嵌入设置在所述清洁腔12的内壁上,所述充电装置70具有一充电端且该充电端的表面与所述清洁腔12的内壁齐平。具体地,所述主壳体中形成有第一容置腔73和第二容置腔74,所述主壳体分为可相互对接第一壳体71和第二壳体72,所述第一壳体71和所述第二壳体72之间可拆卸连接,所述主壳体外侧设有安装部75,所述安装部75用于在所述第一壳体71和所述第二壳体72相互卡接后进行紧固。
37.所述第一壳体71中形成有第一阻隔环711,所述第二壳体72中对应形成有第二阻隔环721,所述第一阻隔环711与所述第二阻隔环721相互卡接,并在所述第一阻隔环711与所述第二阻隔环721的内侧形成所述第一容置腔73,所述第一阻隔环711与所述第二阻隔环721的外侧形成所述第二容置腔74,即,所述第一容置腔73和所述第二容置腔74之间通过所述第一阻隔环711与所述第二阻隔环721相隔离。
38.进一步地,所述第一容置腔73中设有红外信号发射组件76,所述红外信号发射组件76收容在所述第二壳体72中且朝向所述第一壳体71设置,所述第一壳体71配置为允许所述红外信号发射组件76发射的红外信号射出。所述第二壳体72底部设有接线口722,所述红外信号发射组件76通过所述接线口722与外部电源电性连接。所述第二容置腔74中设有电极77,所述第一壳体71开设有开口712,所述电极77自所述第一壳体71内经过所述开口712延伸至所述第一壳体71外部。具体地,所述电极77设有一对,所述开口712对应设有两个且呈左右对称设置在所述红外信号发射组件76的两侧。在本实用新型的另一较佳的实施例中,所述开口712处设有第一防水圈(未图示),用于减少所述清洁组件20工作时产生的水渍溅入,所述第一防水圈可以是环状也可以是环绕所述开口712设置的挡板,具体可根据需要进行设置,在此不做任何限制。
39.所述充电装置70中设有复位件782,所述电极77被配置为设置在一支架78上,该支架78可绕一转轴781转动且与所述复位件782相连,所述电极77在清洁机器人的抵接下可缩进所述开口712,并在清洁机器人离开后在所述复位件782的作用下弹出。在本实用新型的另一实施例中,所述充电装置70的上端设有一延伸部79,所述延伸部79设置在所述开口712的正上方,且所述复位件782和所述转轴781均设置在所述延伸部79中,所述支架78自所述充电装置70延伸至所述延伸部79中,如此设置,使得所述支架78可绕所述延伸部79转动,以增大所述电极77相对于所述开口712位移的行程。
40.由于所述电极77在缩进所述开口712的过程中,所述电极77与所述开口712之间存在间隙,使得所述清洁腔12内的水汽易侵入至所述第一容置腔73和所述第二容置腔74,并在所述第一容置腔73的侧壁上冷凝成小水珠进而影响所述红外信号发射组件76定位的精确度。鉴于此,所述第二阻隔环721的内周边缘向内凹陷以形成有环形槽723,所述第一阻隔环711部分收容在所述环形槽723内,使得所述第一阻隔环711与所述第二阻隔环721错位卡接,如此以实现对所述第一容置腔73进行密封,防止水汽自所述第二容置腔74侵入所述第一容置腔73。
41.如图2所示,所述基站100的后端设有电源接口13,所述电源接口13处插接有电源线,所述电源线的一端与所述电源接口13相连,另一端用于接入市电,以便为所述基站100
进行供电。较佳地,所述电源接口13可以设置在较高位置。所述电源接口13中设有第二防水圈(未图示),所述第二防水圈环绕所述电源接口13的内腔设置,当所述电源线插入所述电源接口13时,通过挤压所述第二防水圈以使所述电源线与所述电源接口13之间密封,从而达到防水的效果。所述第二防水圈可以是橡胶圈或硅胶圈,具体可根据需要进行设置,在此不做任何限制。
42.综上所述,本实用新型所提供的基站100不仅能够为清洁机器人进行充电,还可以实现自动清洁拖布。本实用新型的驱动组件50通过设置在基站100的侧后方,使得整个基站100内部的结构布局紧凑,最大化利用空间,同时可以提高结构运行的稳定性,降低故障率和噪音。另一方面,本实用新型的充电装置70通过对红外信号发射组件76进行密封,可防止水汽侵入,提高清洁机器人回归基站100时的对位精确度。
43.以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。