1.本技术涉及擦窗机器人领域,尤其涉及一种用于擦窗机器人的线缆连接器和擦窗机器人系统。
背景技术:
2.擦窗机器人,又称自动擦窗机、擦玻璃机器人、智能擦窗器、智能窗户清洁器等。擦窗机器人一般会利用自身吸附在玻璃上的力度来带动机身底部的抹布擦掉玻璃上的脏污,并能够自动探测窗户的边角距离、规划擦窗路径。相关技术中,擦窗机器人使用电池供电,并连接安全绳防止跌落。然而,相关技术中的擦窗机器人需要单独设置安全绳并且电池电量有限。
技术实现要素:
3.为了解决上述技术问题或者至少部分地解决上述技术问题,本技术提供了一种用于擦窗机器人的线缆连接器和擦窗机器人系统。
4.第一方面,本技术提供了一种用于擦窗机器人的线缆连接器,该擦窗机器人具有第一连接端子,该线缆连接器包括:线缆;第二连接端子,能够与第一连接端子可转动地电性连接;转动部,注塑成型于线缆并具有预定长度;至少一个轴承,套设在转动部外,并与转动部固定;固定件,适于与擦窗机器人固定连接,该固定件套设在转动部外并与该至少一个轴承固定。
5.在某些实施例中,上述转动部包括:至少一个限位环,紧固在上述线缆外;第一注塑件,注塑成型于该至少一个限位环外;第二注塑件,注塑成型于上述第一注塑件外,将第一注塑件反扣包住。
6.在某些实施例中,上述线缆包括第一线缆和第二线缆,其中,第一线缆的一端与第二连接端子电性连接,第一线缆的另一端与第二线缆连接,第二线缆的至少部分为螺旋形状。
7.在某些实施例中,上述线缆连接器包括两个轴承,上述转动部的中部具有凸出部,上述固定件具有两凹陷部,两个轴承位于凸出部两侧并分别容纳于两凹陷部内。
8.在某些实施例中,上述线缆由内到外依次为电芯、防弹编织材料层和注塑层。
9.在某些实施例中,上述固定件包括轴向分离的第一固定元件和第二固定元件。
10.第二方面,本技术提供了一种用于擦窗机器人的线缆连接器,该擦窗机器人具有第一连接端子和固定件,该线缆连接器包括:线缆;第二连接端子,能够与第一连接端子可转动地电性连接;转动部,注塑成型于线缆并具有预定长度;至少一个轴承,套设在转动部外,并与转动部固定;其中,该固定件,能够套设在转动部外并与至少一个轴承固定。
11.在某些实施例中,上述转动部包括:至少一个限位环,紧固在所述线缆外;第一注塑件,注塑成型于至少一个限位环外;第二注塑件,注塑成型于第一注塑件外,将第一注塑件反扣包住。
12.在某些实施例中,上述线缆包括第一线缆和第二线缆,其中,第一线缆的一端与第二连接端子电性连接,第一线缆的另一端与第二线缆连接,第二线缆的至少部分为螺旋形状。
13.第三方面,本技术提供了一种擦窗机器人系统,包括:擦窗机器人和上述任一线缆连接器。
14.本技术实施例提供的上述技术方案与现有技术相比具有如下优点:本技术实施例提供的技术方案,以有线方式实现了为擦窗机器人供电和/或传输数据,同时避免了擦窗过程中线缆缠绕导致线缆损毁以及擦窗机器人移动受阻的问题。
附图说明
15.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
16.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
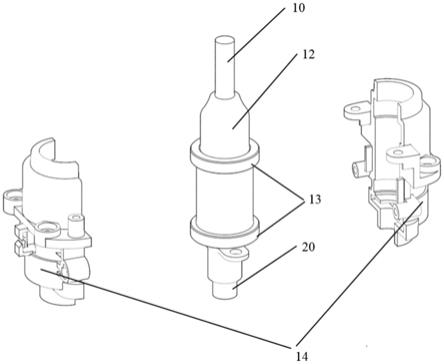
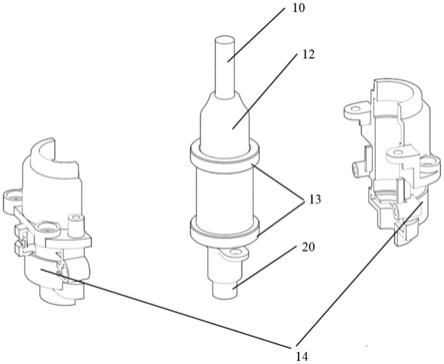
17.图1为本技术实施例提供的线缆连接器一种实施方式的立体图;
18.图2为本技术实施例提供的线缆连接器一种实施方式的剖示图;
19.图3为本技术实施例提供的线缆一种实施方式的结构示意图;
20.图4为本技术实施例提供的线缆连接部一种实施方式的结构示意图。
具体实施方式
21.应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
22.在后续的描述中,使用用于表示元件的诸如“模块”、“部件”或“单元”的后缀仅为了有利于本技术的说明,其本身没有特定的意义。因此,“模块”、“部件”或“单元”可以混合地使用。
23.本技术实施例提供了一种擦窗机器人系统,包括擦窗机器人和线缆连接器。擦窗机器人具有第一连接端子,线缆连接器包括线缆和与第一连接端子适配的第二连接端子,第二连接端子能够与第一连接端子可转动地电性连接。线缆连接器能够相对于擦窗机器人转动,从而在擦窗机器人转动或扭动过程中防止线缆缠绕。在本技术实施例中,线缆连接器被配置为传输电力和/或数据信号,线缆连接器与擦窗机器人固定连接而可兼当安全绳,防止擦窗机器人跌落。
24.本技术实施例的擦窗机器人,通过自身底部的真空泵或者风机装置吸附在玻璃上,自动探测窗户的边角距离、规划擦窗路径,利用自身吸附在玻璃上的力度来带动机身底部的抹布擦掉玻璃上的脏污。擦窗机器人可参见本技术的申请日之前的公知技术,例如本技术人的申请号为201910080687.7的专利申请中的表面处理设备(其内容以引用的方式引入本技术实施例),本技术实施例对此不做限定。
25.本技术实施例提供的线缆连接器,如图1和图2所示,该线缆连接器包括:线缆10;第二连接端子11,与线缆10的一端电性连接,该第二连接端子11能够与擦窗机器人的第一连接端子20可转动地电性连接;转动部12,注塑成型于线缆10并具有预定长度,可选地注塑
成型于线缆10与第二连接端子11之间的连接部分;至少一个轴承13,套设在转动部12外,并与转动部12固定;固定件14,适于与擦窗机器人固定连接(例如通过螺栓等固定连接),该固定件14套设在转动部12外并与该至少一个轴承13固定。
26.在本技术实施例中,转动部12与固定件14之间通过轴承13连接,实现了转动部12与固定件14之间顺滑的转动,进而线缆与擦窗机器人能够顺滑的转动,更好地避免线缆由擦窗机器人转动或扭动导致的缠绕。并且,转动部12注塑成型于线缆10与第二连接端子11之间的连接部分并具有预定长度,提高了连接部分的强度,提高了线缆的抗拉伸性能,使得线缆兼当擦窗机器人的安全绳。
27.在本技术实施中,第二连接端子11与第一连接端子20可转动地电性连接,并被配置为传输电力和/或数据信号。作为一个示例,第一连接端子20为dc座,第二连接端子11为dc头,dc头插入dc座中,并能够在dc座中转动同时保持电性连接。应当理解,本技术实施例对于第二连接端子11和第一连接端子20的形式不做限定,凡是可转动的电性连接都是可被构想的,例如无线连接方式等。
28.在一些示例中,线缆连接器被配置为向擦窗机器人传输电力,该电力用于擦窗机器人的运作。在另一些示例中,线缆连接器被配置为向擦窗机器人传输电力,该电力用于擦窗机器人的运作,同时为擦窗机器人内置的可充电电池进行充电。线缆连接器还可被配置为,在擦窗机器人的非运作状态下,为其内置的可充电电池进行充电。
29.在一些示例中,线缆连接器被配置为向擦窗机器人传输数据信号,例如控制信号等,本技术实施例对此不做限定。
30.在某些实施例中,如图2所示,转动部12包括:至少一个限位环121,紧固在上述线缆10外;第一注塑件122,注塑成型于该至少一个限位环121外;第二注塑件123,注塑成型于上述第一注塑件122外,将第一注塑件122反扣包住。可选地,该第一注塑件122上具有一个或多个凸部和/或凹部(图2中示出了凸部1211),第二注塑件123填充上述凹部和/包裹上述凸部(图2中示出了第一注塑件包括与凸部1211外),由此进一步增加第一注塑件122与第二注塑件123之间的强度。
31.进一步参考图2所示,第一注塑件122注塑成型于该至少一个限位环121外,并覆盖线缆10上一定长度,同时覆盖第二连接端子11上的一部分。第二注塑件123,注塑成型于上述第一注塑件122外,并将第一注塑件122包裹在内。
32.作为一个示例,线缆连接器使用tpu材料,分为3层加工。第一次注塑形成线缆10,电芯被注塑在线缆10内部,使用类似防弹编织材料将电芯注塑成实心,露出第二连接端子11。跌落时,电芯和焊点在线缆10内部不断开。在线缆10外部先压住一个铁环(作为限位环121),第二次注塑形成第一注塑件122,铁环增加线缆10与第一注塑件122两者之间的接触面积和摩擦力,跌落时确保线缆10不被抽出。铁环内壁可设置软性材料避免压住时把线缆10压坏。在第一注塑件122外注塑形成第二注塑件123,将第一注塑件122外一体线反扣包住,确保内部线缆10与第一注塑件122套件不脱出。在第二注塑件123外部做装配轴承定位。可选地,第二注塑件123注塑完毕后套装轴承,是在刚注塑完毕后材料较热较软的情况下套轴承。
33.在某些实施例中,如图2所示,线缆连接器包括两个轴承13,上述转动部12的中部具有凸出部1231(图2中示出了凸出部1231形成于第二注塑件123的情形)。上述固定件14具
有两凹陷部,两个轴承13位于凸出部1231两侧并分别容纳于两凹陷部内,由此将轴承13定位在转动部12和固定件14,并且提高抗拉伸能力,避免在线缆收到拉力时线缆从固定件内部脱落。进一步参考图2所示,上述固定件14包括轴向分离的第一固定元件141和第二固定元件142。第一固定元件141上具有第一凹陷部1411和第二凹陷部1412,第二固定元件142上具有第三凹陷部1421和第四凹陷部1422。第一凹陷部1411与第三凹陷部1421构成容纳一轴承的凹陷部,第二凹陷部1412与第四凹陷部1422构成容纳另一轴承的凹陷部。
34.在某些实施例中,参考图3所示,上述线缆10包括第一线缆101和第二线缆102,其中,第一线缆101的一端与第二连接端子11电性连接,第一线缆101的另一端与第二线缆102连接,第二线缆102的至少部分为螺旋形状(图3中示出了螺旋形状部1021)。第一线缆101与第二线缆102连接处具有线缆连接部103。螺旋形状部1021在受到拉力时产生类似于弹簧的拉伸,对拉力进行缓冲,提高线缆的抗拉伸性能。
35.在某些实施例中,第一线缆101和第二线缆102通过不同的注塑工艺注塑成型。在一些实施例中,第一线缆101和第二线缆102采用不同的材料注塑成型。本技术实施例对此不做限定。
36.在某些实施例中,参考图4所示,线缆连接部103包括:第一线缆连接部1031和第二线缆连接部1032,第一线缆连接部1031注塑成型于第一线缆101与第二线缆102连接处并具有一定长度,第二线缆连接部1032注塑成型于第一线缆连接部1031外。为了提高第一线缆101与第二线缆102的连接强度,如图4所示,第一线缆101上设置第一连接限位凸部1011,第二线缆上102上设置第二连接限位凸部1022,从而增加第一线缆101及第二线缆102与第一线缆连接部1031的结合强度。
37.在某些实施例中,上述线缆10由内到外依次为电芯、防弹编织材料层和注塑层,由此增加线缆10的强度,使得在线缆10能够承受更大的拉伸力,但本技术实施例并不限于此,其他具有一定强度的线缆结构也是可以被采纳的,包括但不限于从线缆的材料和结构方面增加线缆的强度,以提高其抗拉伸性能,本技术实施例对此不做赘述。
38.在本技术实施例中,线缆10的另一端可连接直流电源或交流电源,并可与固定物进行固定,本技术实施例对此不做限定。
39.在一些实施例中,上述固定件可内置于擦窗机器人,在使用时将线缆连接器与固定件装配。本技术实施例对此不做限定,上述的至少部分可作为配件,在使用时装配或者替换。
40.本技术实施例提供的上述技术方案与现有技术相比具有如下优点:本技术实施例提供的技术方案,以有线方式实现了为擦窗机器人供电和/或传输数据,并且由线缆至少部分充当安全绳的作用,同时避免了擦窗过程中线缆缠绕导致线缆损毁以及擦窗机器人移动受阻的问题。
41.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
42.上述本技术实施例序号仅仅为了描述,不代表实施例的优劣。
43.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本技术的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。