技术特征:
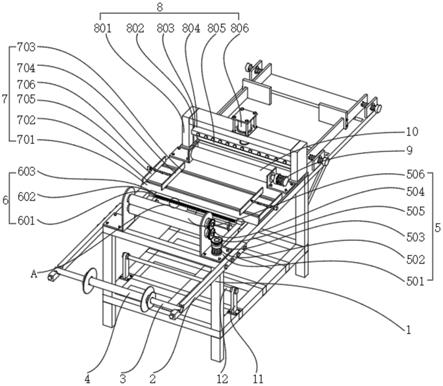
1.一种空中轨道箱梁检测机器人,包括框体式的机架,其特征在于,所述机架的底部安装有两组行走轮,所述机架上沿着机架宽度方向的两侧分别安装有一组顶紧轮和一组弹性顶紧轮,所述顶紧轮和弹性顶紧轮分别与轨道箱梁两侧的腹板紧贴;所述机架的上部安装有传感器支架;所述机架的底部安装有沿着垂直于轨道箱梁内底面的第一位移传感器;所述传感器支架的两侧分别安装有多个第二位移传感器,所述机架的下方也设置有多个第二位移传感器,所述第二位移传感器沿着垂直于轨道箱梁的腹板的方向设置;所述机架的顶部上安装有至少2个第三位移传感器,所述第三位移传感器垂直安装在机架顶部。2.根据权利要求1所述的空中轨道箱梁检测机器人,其特征在于,所述第一位移传感器的数量为8个,第一位移传感器采用350mm位移传感器。3.根据权利要求1所述的空中轨道箱梁检测机器人,其特征在于,所述传感器支架的两侧一共安装有6个第二位移传感器,机架的下方安装有6个第二位移传感器。4.根据权利要求1所述的空中轨道箱梁检测机器人,其特征在于,所述第三位移传感器分布在沿机架宽度方向的左右两侧。5.根据权利要求1-4中任一项所述的空中轨道箱梁检测机器人,其特征在于,所述机架的下部安装有2个水平设置的第四位移传感器,所述的2个第四位移传感器分别垂直于轨道箱梁两侧的腹板以便于对腹板上的槽口进行检测。6.根据权利要求5所述的空中轨道箱梁检测机器人,其特征在于,所述机架的顶面安装有用于检测检测机器人倾斜角度的倾角传感器。7.根据权利要求1所述的空中轨道箱梁检测机器人,其特征在于,所述机架的底面中心安装有用于检测轨道箱梁的平面和高程坐标的棱镜。8.根据权利要求5所述的空中轨道箱梁检测机器人,其特征在于,机架的上部安装有保护罩壳和控制箱,所述第一位移传感器、第二位移传感器、第三位移传感器、第四位移传感器、倾角传感器均与控制箱电连接,所述控制箱与外部的全站仪和电脑无线通信连接。
技术总结
本实用新型属于轨道箱梁检测技术领域,公开了一种空中轨道箱梁检测机器人,型为了解决由于轨道箱梁钢结构尺寸大、重量大而采用人工抽检的方式不能准确反映轨道箱梁制造以及安装过程中的线性问题。本实用新型包括机架,机架的底部安装行走轮,所述机架两侧分别安装有一组顶紧轮和一组弹性顶紧轮;所述机架的上部安装有传感器支架;所述机架的底部安装有第一位移传感器;所述传感器支架的两侧分别安装以及机架的下方设置有多个第二位移传感器;所述机架的顶部上安装有至少2个第三位移传感器。本实用新型既能够对轨道箱梁制作尺寸进行检测以及对轨道箱梁安装过程中进行线性检测,并能够对轨道箱梁进行全面检测。能够对轨道箱梁进行全面检测。能够对轨道箱梁进行全面检测。
技术研发人员:郭晓 崔洪岩 曹晗 刘瑜 丁仕洪 褚部 卢长龙 黄绍泉 葛会彬 李宝蕴 蒿利 刘佩 刘少波
受保护的技术使用者:中铁四局集团有限公司
技术研发日:2021.11.29
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。